

2.3. Струнные и стержневые преобразователи
Струнные и стержневые (вибрационно-частотные) преобразователи являются разновидностью частотных преобразователей с механическим резонансом.
В этих преобразователях чувствительным элементом служит плоская или круглая струна – струнные преобразователи, или балочка прямоугольного сечения, изготовленная за одно целое с упругим элементом, – стержневые преобразователи.
Работа струнных механических резонаторов основана на использовании изменения частоты поперечных колебаний струны в зависимости от ее натяжения. Связь частоты поперечных колебаний струны с величиной нормальных механических напряжений в ней определяется известной зависимостью
![]() (2.9)
(2.9)
где f – частота собственных колебаний струны; l – длина струны; σ – механические напряжения в струне; ρ – плотность материала струны.
Эту зависимость следует рассматривать лишь как первое приближение, так как она не учитывает изгибной жесткости струны и влияния заделки.
Естественной входной величиной струнных и стержневых преобразователей является сила, причем в подавляющем большинстве случаев струна работает в режиме вынужденных деформаций. Для осуществления такого режима нужно, чтобы жесткость упругого элемента и всей механической цепи, замкнутой на струну, была бы значительно выше жесткости струны. При выполнении этого условия струна осуществляет два последовательных преобразования: силы в деформацию и деформации в частоту.
Стабильность функции преобразования струнного резонатора в первую очередь определяется качеством крепления предварительно натянутой струны к упругому элементу. На сегодня лучшим способом крепления ленточных струн (рис. 2.14), а именно такие струны используются в современных датчиках, является зажим между хорошо обработанными о подогнанными параллельными плоскостями. Струна 1 в месте закрепления переходит в широкую лопаточку, которая закрепляется на плоскости упора 4 с помощью прижимной планки 3 и двух винтов 2 [12].
С трунные
резонаторы с одной струной имеют
нелинейность функции преобразования
порядка 3…5% на 10% девиации частоты и
существенную температурную погрешность.
В дифференциальных струнных преобразователях
эти недостатки теоретически можно
свести к нулю. Конструкция упругого
элемента дифференциального преобразователя
предусматривает крепление одинаковых
струн, причем под воздействием деформации
частота собственных колебаний одной
струны увеличивается, а частота другой
уменьшается.
трунные
резонаторы с одной струной имеют
нелинейность функции преобразования
порядка 3…5% на 10% девиации частоты и
существенную температурную погрешность.
В дифференциальных струнных преобразователях
эти недостатки теоретически можно
свести к нулю. Конструкция упругого
элемента дифференциального преобразователя
предусматривает крепление одинаковых
струн, причем под воздействием деформации
частота собственных колебаний одной
струны увеличивается, а частота другой
уменьшается.
В качестве примера на рис. 2.15 приведен
мембранный упругий элемент датчика
силы с двумя струнами. Упругий элемент
выполнен в виде круглой мембраны1,
двух верхних 2
и двух нижних 6
упоров, на которых закреплены пружинными
планками 5
и винтами предварительно натянутые
одинаковые стальные струны 3.
качестве примера на рис. 2.15 приведен
мембранный упругий элемент датчика
силы с двумя струнами. Упругий элемент
выполнен в виде круглой мембраны1,
двух верхних 2
и двух нижних 6
упоров, на которых закреплены пружинными
планками 5
и винтами предварительно натянутые
одинаковые стальные струны 3.
Струны расположены взаимно перпендикулярно друг другу, что позволяет уменьшить погрешность при приложении усилия под углом к оси преобразователя. Через стержень измеряемое усилие Fпередается на упругий элемент, при этом мембрана прогибается, в результате чего верхние и нижние упоры разворачиваются. Натяжение верхней струны уменьшается, а натяжение нижней увеличивается, что вызывает изменение частоты собственных колебаний струн на одно и то же значение, но с разными знаками.
Как уже отмечалось, стабильность характеристик струнного резонатора в первую очередь определяется качеством крепления струны.
К ардинальное
решение проблемы крепления, сводящееся
к отказу от всякого крепления как
такового, предложено Л.Г. Эткиным
[13]. Роль резонатора в этих конструкциях
выполняет вместо струны тонкая (доли
миллиметра) стальная пластинка,
изготовленная за одно целое с упругим
элементом из одной заготовки (рис. 2.16).
ардинальное
решение проблемы крепления, сводящееся
к отказу от всякого крепления как
такового, предложено Л.Г. Эткиным
[13]. Роль резонатора в этих конструкциях
выполняет вместо струны тонкая (доли
миллиметра) стальная пластинка,
изготовленная за одно целое с упругим
элементом из одной заготовки (рис. 2.16).
Начальное напряжение в такой конструкции отсутствует, и начальная частота целиком определяется упругими свойствами пластинки. Под действием приложенной силы упругий элемент деформируется и пластина растягивается, при этом повышается частота собственных колебаний. Датчик с такими преобразователями известны как стержневые или вибрационно-частотные.
Несколько конструкций упругих элементов стержневых датчиков представлено на рис. 2.17 [79]. Кольцевые упругие элементы предназначены для датчиков силы и давления, а упругий элемент мембранной конструкции используется только в датчиках давления.
Д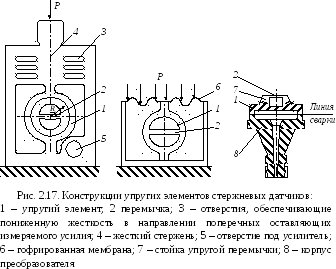 атчики
со стержневыми преобразователями в
настоящее время применяются как
высокочастотные измерители статических
и медленноменяющихся давлений, усилий
и крутящих моментов. Упругие элементы
серийных датчиков изготавливаются из
стали 35ХГСА, колеблющиеся перемычки
имеют начальную частоту 3000 и 6000 Гц
при девиации частоты в пределах 25…30 %.
атчики
со стержневыми преобразователями в
настоящее время применяются как
высокочастотные измерители статических
и медленноменяющихся давлений, усилий
и крутящих моментов. Упругие элементы
серийных датчиков изготавливаются из
стали 35ХГСА, колеблющиеся перемычки
имеют начальную частоту 3000 и 6000 Гц
при девиации частоты в пределах 25…30 %.
Механические резонаторы, как правило, используются в частотных датчиках в режиме свободных колебаний или в автоколебательном режиме. Возбуждение колебаний в резонаторах осуществляется двумя методами: электромагнитным, при котором происходит взаимодействие струны или перемычки из ферромагнитной стали и переменного магнитного потока, создаваемого электромагнитным возбудителем; электродинамическим, при котором происходит взаимодействие переменного тока, протекающего через струну из диамагнитного материала, и магнитного потока постоянного магнита. Электромагнитное возбуждение получило больше распространение, тем более что для стержневых преобразователей это единственный способ, так как нельзя электрически изолировать перемычку от упругого элемента.
О дна
из возможных конструкций электромагнитных
возбудителей показана на рис. 2.18.
Возбудитель расположен с зазоромδ
< 1 мм от струны или перемычки 1
и состоит из постоянного магнита 2,
катушки 3
и магнитопровода 4.
При прохождении электрического импульса
запроса по катушке магнитное поле
увеличивается и струна притягивается
к магниту. По окончании импульса запроса
струна начинается колебаться с частотой
собственных колебаний.
дна
из возможных конструкций электромагнитных
возбудителей показана на рис. 2.18.
Возбудитель расположен с зазоромδ
< 1 мм от струны или перемычки 1
и состоит из постоянного магнита 2,
катушки 3
и магнитопровода 4.
При прохождении электрического импульса
запроса по катушке магнитное поле
увеличивается и струна притягивается
к магниту. По окончании импульса запроса
струна начинается колебаться с частотой
собственных колебаний.
С труктурная
схема частотного преобразователя с
резонатором, работающим в режиме
свободных колебаний, дана на рис. 2.19.
Измеряемая величинаХН.ЭЛ.
преобразуется упругим элементом в
деформацию, от которой зависит частота
собственных колебаний механического
резонатора. Колебания в резонаторе
возбуждаются с помощью возбудителя, на
вход которого подается импульс запроса
от измерительного устройства. Для
преобразования энергии возбужденных
механических колебаний резонатора в
электрическую энергию используется
специальный электромагнитный или
индуктивный преобразователь-приемник.
Сигнал с выхода приемника в виде
затухающих колебаний усиливается и
поступает на выход частотного
преобразователя.
труктурная
схема частотного преобразователя с
резонатором, работающим в режиме
свободных колебаний, дана на рис. 2.19.
Измеряемая величинаХН.ЭЛ.
преобразуется упругим элементом в
деформацию, от которой зависит частота
собственных колебаний механического
резонатора. Колебания в резонаторе
возбуждаются с помощью возбудителя, на
вход которого подается импульс запроса
от измерительного устройства. Для
преобразования энергии возбужденных
механических колебаний резонатора в
электрическую энергию используется
специальный электромагнитный или
индуктивный преобразователь-приемник.
Сигнал с выхода приемника в виде
затухающих колебаний усиливается и
поступает на выход частотного
преобразователя.
В ряде случаев один и тот же электромеханический преобразователь, например электромагнитный преобразователь на рис. 2.18, используется в обратимом режиме в качестве возбудителя и приемника. Тогда для связи с датчиком достаточно двухпроводной линии.
Частотные преобразователи с механическим резонатором, работающим в автоколебательном режиме, строятся по структурной схеме, представленной на рис. 2.20.
Р езонатор
получает энергию от возбудителя, на
вход которого поступает сигнал с выхода
усилителя. Вход усилителя в свою очередь
связан с выходом приемника, преобразующего
колебания того же резонатора.
Самовозбуждение колебаний в такой
замкнутой системе происходит в том
случае, если ее коэффициент передачи
(в разомкнутом виде) больше единицы, а
суммарный фазовый сдвиг всех звеньев
равен нулю или целому числу периодов
колебаний. Поэтому при использовании
усилителя с фазовым сдвигом, близким к
нулю, и с достаточно большим коэффициентом
усиления самовозбуждение системы
произойдет точно на частоте. Существенным
положительным свойством этого режима
работы является простота схемной
реализации и непрерывность преобразования.
езонатор
получает энергию от возбудителя, на
вход которого поступает сигнал с выхода
усилителя. Вход усилителя в свою очередь
связан с выходом приемника, преобразующего
колебания того же резонатора.
Самовозбуждение колебаний в такой
замкнутой системе происходит в том
случае, если ее коэффициент передачи
(в разомкнутом виде) больше единицы, а
суммарный фазовый сдвиг всех звеньев
равен нулю или целому числу периодов
колебаний. Поэтому при использовании
усилителя с фазовым сдвигом, близким к
нулю, и с достаточно большим коэффициентом
усиления самовозбуждение системы
произойдет точно на частоте. Существенным
положительным свойством этого режима
работы является простота схемной
реализации и непрерывность преобразования.
Погрешности частотных преобразователей с управляемыми механическими резонаторами состоят из трех составляющих [11].
Первая составляющая – это погрешность преобразования измеряемой величины в промежуточную величину – деформацию, от которой непосредственно зависит собственная частота резонатора. Эта погрешность целиком определяется свойствами упругого элемента и входным преобразователем, если он имеется.
Вторая составляющая появляется из-за того, что собственная частота резонатора зависит не только от деформации, но и от внешних влияющих факторов, в основном от температуры, и от влияния заделки в струнных резонаторах. Сюда же следует отнести и погрешность изменения собственной частоты при изменении амплитуды колебаний.
Третья составляющая погрешности связана с тем, что возбуждаемые в резонаторе колебания имеют частоту, не точно совпадающую с частотой собственных колебаний резонатора. При работе в автоколебательном режиме величина этой составляющей зависит от фазовых характеристик отдельных элементов частотного преобразователя, а в режиме свободных колебаний эта составляющая погрешности отсутствует.
Характерная особенность частотных преобразователей с механическими резонаторами заключается в том, что амплитудные погрешности возбудителя, приемника и усилителя не влияют непосредственно на погрешность преобразователя.