

3.5. Применение гальваномагнитных преобразователей в средствах автоматизации
На основе ДХ и магниторезисторов возможно создание приборов со свойствами, 3,7,8 которых нельзя достигнуть другими измерительными преобразователями.
Рассмотрим области их применения:
1. Измерение индукции постоянных и переменных магнитных полей. Тесламетрами на гальваномагнитных датчиках с высокой точностью (до десятых долей процента) измеряется магнитная индукция от 10-6 до нескольких десятков Тл. Миниатюрными зондами приборов измеряют индукцию в труднодоступных местах, где невозможно использование других методов.
Предпочтение часто отдается преобразователям Холла (особенно в микроэлектронном исполнении), которые при питании их постоянным током управления обладают достаточно линейной функцией преобразования в довольно широком диапазоне магнитных индукций и температур (табл. 3.7).
 Таблица
3.7
Таблица
3.7
Таблица 3.7
Сравнительная таблица основных параметров преобразователей
магнитного поля
|
Наименование преобразователя |
Размеры, мм |
Рабочий ток, мА |
Сопротивление, Ом |
Магнитная чувствительность, В/Тл |
ТКС, %/град |
Диапазон рабочих температур,С | |
|
при В=0 |
при В=1Тл | ||||||
|
Преобразова- тель Холла |
63 0,5 |
5,0-200 |
1,0-2103 |
1,0-2103 |
0,1-5 |
0,01-0,3 |
-273 +300 |
|
Магниторезис-тор |
42 0,5 |
0,5-10 |
10-103 |
100-5103 |
0,1-2 |
0,1-2 |
-20 +90 |
|
Магнитодиод |
221 |
2,0-5,0 |
(2-6) 103 |
(6-25) 103 |
5-60 |
1,0-2,0 |
-60 +85 |
|
ГМР преобразователь |
510,5 |
0,8-1,0 |
(5-50) 103 |
(1-5) 103 |
15-100 |
2,0 |
-60 +60 |
Измерив индукцию магнитного поля, создаваемого током, протекающим по проводнику, можно осуществить бесконтактное измерение значения этого тока. В тех случаях, когда сила тока, протекающего через проводник, достаточно велика, можно измерить силу этого тока путем определения индукции магнитного поля непосредственно на поверхности проводника.
Д
(3.27)![]() ля
проводника круглого сечения радиусом
r, по которому проходит ток I1,
тангенциальная составляющая магнитной
индукции на расстоянии
Rr
от центра проводника определяется
выражением
ля
проводника круглого сечения радиусом
r, по которому проходит ток I1,
тангенциальная составляющая магнитной
индукции на расстоянии
Rr
от центра проводника определяется
выражением
где 0=1,257·10-6(Вс)/(А·м) - магнитная постоянная.
Если сила тока в проводнике мала для получения необходимого сигнала на выходе преобразователя Холла, последний помещается в воздушный зазор магнитного концентратора, охватывающего магнитопровод. В этом случае
(3.28)![]()
2. Бесконтактные сигнализаторы положения перемещающихся объектов на ДХ и магниторезисторах применяются в случаях, если необходимо получить весьма точную информацию о положении движущегося объекта при условии, что скорость перемещения его высока и велико расстояние между ним и воспринимающим элементом. Такая задача возникает при программном управлении металлорежущими станками, в автоматизированных подъемно–транспортных механизмах и т.д. Сигнализаторы положения на ДХ и магниторезисторах невосприимчивы к воздействию газов, пыли, вибрациям, имеют большой срок службы. Это обусловливает высокую надежность их работы и облегчает их обслуживание. Индикаторы положения состоят из магнитной системы и полупроводникового преобразователя магнитного поля (рис. 3.21), принцип действия основан на возникновении электрического сигнала на выходе гальваномагнитного преобразователя при воздействии на него магнитного поля определенной интенсивности. В свою очередь напряженность магнитного поля определяется положением перемещающейся детали. Разомкнутая магнитная система схематически изображена на рис. 3.21 а. На одном из полюсов постоянного магнита 1 находится полюсной наконечник 2 с гальваномагнитным преобразователем 3. При перемещении ферромагнитной детали 4 вблизи полюсного башмака усиливается магнитный поток на полюсном наконечнике, приводящий к изменению сигнала на магниточувствительном элементе. В замкнутой магнитной системе (рис. 3.21 б) при перемещении подвижной детали с закрепленным на ней постоянным магнитом 5 вблизи воздушного зазора, в который помещен преобразователь магнитного поля, магнитный поток, пронизывающий плоскость преобразователя, сначала уменьшается, а затем увеличивается. Если постоянный магнит 5 перемещать не сверху вниз, как в предыдущем случае, а наоборот снизу вверх, то магнитный поток, пронизывающий преобразователь, сначала будет возрастать, а затем убывать. Это свойство может быть использовано для определения направления перемещения подвижной детали.
 3.
Датчики,
предназначенные для преобразования
линейных перемещений в электрическую
величину 11,
построенные на основе гальваномагнитных
преобразователей, по сравнению с
аналогичными датчиками, основанными
на реостатном, емкостном, индуктивном,
фотоэлектрическом и других принципах,
характеризуются более высокими
разрешающей способностью, порогом
чувствительности, надежностью работы
при относительной простоте конструкции,
малыми габаритами, небольшим собственным
потреблением энергии, длительным сроком
службы. Принцип действия датчика
перемещения на гальваномагнитном
принципе состоит в следующем. ДХ или
магниторезистор, жестко связанный с
перемещающимся предметом, находится в
неоднородном магнитном поле. При
перемещении ДХ или магниторезистора в
магнитном поле напряжение Холла (или
падение напряжения на магниторезисторе)
будет функцией этих механических
перемещений. Датчик линейных перемещений
на основе магниторезисторов показан
на рис. 3.22 а. Два одинаковых жестко
закрепленных по о
3.
Датчики,
предназначенные для преобразования
линейных перемещений в электрическую
величину 11,
построенные на основе гальваномагнитных
преобразователей, по сравнению с
аналогичными датчиками, основанными
на реостатном, емкостном, индуктивном,
фотоэлектрическом и других принципах,
характеризуются более высокими
разрешающей способностью, порогом
чувствительности, надежностью работы
при относительной простоте конструкции,
малыми габаритами, небольшим собственным
потреблением энергии, длительным сроком
службы. Принцип действия датчика
перемещения на гальваномагнитном
принципе состоит в следующем. ДХ или
магниторезистор, жестко связанный с
перемещающимся предметом, находится в
неоднородном магнитном поле. При
перемещении ДХ или магниторезистора в
магнитном поле напряжение Холла (или
падение напряжения на магниторезисторе)
будет функцией этих механических
перемещений. Датчик линейных перемещений
на основе магниторезисторов показан
на рис. 3.22 а. Два одинаковых жестко
закрепленных по о тношению
друг к другу магниторезистора помещаются
в зазор постоянного магнита. В исходном
положении у обоих магниторезисторов
магнитным полем пронизывается половина
площади их поверхности. Каждый из
магниторезисторов является плечом
моста, два других плеча которого
представляют собой постоянные
сопротивления. В исходном положении
выходное напряжение моста U равно нулю.
При перемещении магниторезисторов в
направлении, указанном стрелкой,
сопротивление магниторезистора 1
возрастает, а магниторезистора 2,
наоборот, уменьшается. При изменении
направления перемещения изменяется
также и знак напряжения разбаланса
моста U. На рис. 3.22 б приведены кривые
зависимости отношения напряжения на
выходе моста U к напряжению на его входе
U0
от перемещения.
тношению
друг к другу магниторезистора помещаются
в зазор постоянного магнита. В исходном
положении у обоих магниторезисторов
магнитным полем пронизывается половина
площади их поверхности. Каждый из
магниторезисторов является плечом
моста, два других плеча которого
представляют собой постоянные
сопротивления. В исходном положении
выходное напряжение моста U равно нулю.
При перемещении магниторезисторов в
направлении, указанном стрелкой,
сопротивление магниторезистора 1
возрастает, а магниторезистора 2,
наоборот, уменьшается. При изменении
направления перемещения изменяется
также и знак напряжения разбаланса
моста U. На рис. 3.22 б приведены кривые
зависимости отношения напряжения на
выходе моста U к напряжению на его входе
U0
от перемещения.
Р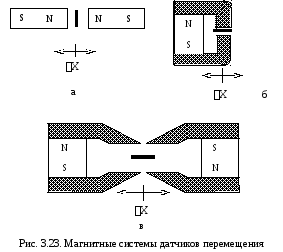 ассмотрим
датчики перемещений, построенные с
использованием ДХ. Интервал перемещений,
в котором В (Х) является линейной функцией
перемещения Х, определяет диапазон
перемещений. Чувствительность датчика
зависит от градиента магнитной индукции
dВ/dX вдоль направления перемещения и
магнитной чувствительности ДХ. Задача
заключается в создании таких магнитных
систем, у которых градиент индукции
dВ/dX в направлении механического
перемещения имеет постоянное и возможно
более высокое значение. На рис. 3.23
показаны три магнитные системы, в которых
при перемещении ДХ в направлении Х
изменяется магнитный поток, пронизывающий
плоскость датчика.
ассмотрим
датчики перемещений, построенные с
использованием ДХ. Интервал перемещений,
в котором В (Х) является линейной функцией
перемещения Х, определяет диапазон
перемещений. Чувствительность датчика
зависит от градиента магнитной индукции
dВ/dX вдоль направления перемещения и
магнитной чувствительности ДХ. Задача
заключается в создании таких магнитных
систем, у которых градиент индукции
dВ/dX в направлении механического
перемещения имеет постоянное и возможно
более высокое значение. На рис. 3.23
показаны три магнитные системы, в которых
при перемещении ДХ в направлении Х
изменяется магнитный поток, пронизывающий
плоскость датчика.
Н
(3.29)
![]() а
рис 3.23 а ДХ перемещается в воздушном
зазоре между двумя постоянными магнитами,
направленными друг к другу одноименными
полюсами. На рис. 3.23 б ДХ выдвигается из
воздушного зазора полюсных наконечников.
На рис. 3.23 в одна половина плоскости
датчика пересекается магнитным полем
в положительном направлении, а другая
– в отрицательном. Наиболее приемлемой
является конструкция квадрупольной
магнитной системы (рис. 3.23 в). Ее
использование в датчиках перемещения
позволяет фиксировать перемещения
величиной до 10–10м. Зависимость
результирующей индукции, воздействующей
на ДХ, от перемещения для различных
типов магнитных систем показана на рис.
3.24. Если через ДХ протекает неизменный
управляющий ток, то напряжение Холла
(3.4) будет пропорционально перемещению.
Чувствительность датчиков перемещения,
работающих по описанному принципу,
выражается в вольтах на миллиметр
механического перемещения. Она
определяется как произведение магнитной
чувствительности ДХ на величину градиента
магнитной индукции
а
рис 3.23 а ДХ перемещается в воздушном
зазоре между двумя постоянными магнитами,
направленными друг к другу одноименными
полюсами. На рис. 3.23 б ДХ выдвигается из
воздушного зазора полюсных наконечников.
На рис. 3.23 в одна половина плоскости
датчика пересекается магнитным полем
в положительном направлении, а другая
– в отрицательном. Наиболее приемлемой
является конструкция квадрупольной
магнитной системы (рис. 3.23 в). Ее
использование в датчиках перемещения
позволяет фиксировать перемещения
величиной до 10–10м. Зависимость
результирующей индукции, воздействующей
на ДХ, от перемещения для различных
типов магнитных систем показана на рис.
3.24. Если через ДХ протекает неизменный
управляющий ток, то напряжение Холла
(3.4) будет пропорционально перемещению.
Чувствительность датчиков перемещения,
работающих по описанному принципу,
выражается в вольтах на миллиметр
механического перемещения. Она
определяется как произведение магнитной
чувствительности ДХ на величину градиента
магнитной индукции
Если магнитная чувствительность ДХ равна 1 В/Тл и градиент dВ/dХ равен 1 Тл/мм (рис. 3.23 в), то чувствительность датчика перемещения равна 1 В/мм.
4. Рассмотренный принцип также легко применить в датчиках давления. Схема процесса преобразования давления представлена на рис. 3.25.
ДавлениеДеформация упругого элементаВзаимное перемещение постоянного магнита и гальваномагнитного датчикаИзменение градиента магнитной индукции Изменение ЭДС Холла (изменение выходного сигнала)
Рис. 3.25. Схема процесса преобразования давления
с использованием полупроводникового преобразователя Холла
Эта схема позволяет получить хорошую линейность датчика давления. При регулировке расстояния между ДХ и постоянным магнитом возможно получение различной чувствительности.
Д атчик
давления на основе гальваномагнитных
преобразователей целесообразно
использовать для регистрации импульсных
и быстропеременных давлений, вызывающих
перемещение постоянного магнита
относительно ДХ на величину порядка
0,01 мм. Это означает, что имеется возможность
создания высокоточных датчиков,
работающих в широком диапазоне давлений.
На рис. 3.26 представлен датчик давления
с чувствительным элементом Холла. В
этой конструкции градиент магнитного
поля dВ/dХ изменяется за счет изменения
воздушного зазора между постоянным
магнитом 4 и ДХ 5. Второй постоянный
магнит в данной схеме является
компенсационным и служит для регулировки
нулевого уровня ДХ.
атчик
давления на основе гальваномагнитных
преобразователей целесообразно
использовать для регистрации импульсных
и быстропеременных давлений, вызывающих
перемещение постоянного магнита
относительно ДХ на величину порядка
0,01 мм. Это означает, что имеется возможность
создания высокоточных датчиков,
работающих в широком диапазоне давлений.
На рис. 3.26 представлен датчик давления
с чувствительным элементом Холла. В
этой конструкции градиент магнитного
поля dВ/dХ изменяется за счет изменения
воздушного зазора между постоянным
магнитом 4 и ДХ 5. Второй постоянный
магнит в данной схеме является
компенсационным и служит для регулировки
нулевого уровня ДХ.
Преимуществами датчиков давления с гальваномагнитными преобразователями являются:
возможность работы в агрессивных средах. Это объясняется тем, что чувствительный элемент и преобразовательный узел связаны между собой посредством магнитного поля;
при отключении питания и последующем восстановлении информация о текущем давлении не теряется.
5. Бесконтактные реле на магниторезисторах построены на базе обычных миниатюрных электромагнитных реле. При прохождении тока через катушку реле в воздушном зазоре магнитной цепи, куда помещен магниторезистор, возникает магнитное поле. Под действием последнего сопротивление магниторезистора увеличивается приблизительно в восемь раз. Выходная цепь, управление которой осуществляется магниторезистором, может быть эквивалентна замыкающему, размыкающему или переключающему механическим контактам.
6. Бесколлекторные двигатели постоянного тока отличаются от обычных щеточных тем, что коммутация тока в их обмотках осуществляется не посредством щеток и разрезного коллектора, а с помощью электронной схемы. Такой двигатель собран из ротора в виде постоянного магнита, обмоток, статора и гальваномагнитных датчиков–индикаторов угла поворота ротора. В качестве последних используется преимущественно ДХ, что объясняется следующими обстоятельствами:
выходной сигнал, снимаемый с ДХ и служащий для управления током в обмотке двигателя, зависит от направления магнитного поля, воздействующего на ДХ. Таким образом, один ДХ может управлять двумя обмотками, сдвинутыми на 180. При использовании же магниторезисторов каждая обмотка требует самостоятельного магниторезистора;
индукция в воздушном зазоре двигателя, куда помещается гальваномагнитный датчик, обычно составляет 0,4–0,6 Тл. Этого достаточно для получения сигнала нужного значения с выхода ДХ, но не обеспечивает требуемого изменения сопротивления магниторезистора.
Преимуществами бесколлекторных двигателей являются длительный срок службы, взрывобезопасность и отсутствие искровых помех.