

теория автоматического управления
.pdfФедеральное агентство железнодорожного транспорта Уральский государственный университет путей сообщения Кафедра «Автоматика, телемеханика и связь
на железнодорожном транспорте»
В.А. Баранов
В.Л. Нестеров
Н.Л. Ракина
!"!#$%& '(#)%'#"*$!+),)-./'(0$1"2
Учебно-методическое пособие по курсовому проектированию по дисциплине
«Теория автоматического, управления» для студентов специальности
190901 – «Системы обеспечения движения поездов»
всех форм обучения
Екатеринбург
Издательство УрГУПС
2013
УДК 681.Б53 Б24
Баранов, В. А.
Б24 Системы автоматического управления : учеб.-метод. пособие к курсовому проектированию / В. А. Баранов, В. Л. Нестеров, Н. Л. Ракина.
– Екатеринбург : Изд-во УрГУПС, 2013. – 89, [3] с.
Рассмотрен расчет звеньев для экспериментального определения параметров и характеристик звеньев при их моделировании, приведены краткие сведения по теории автоматического управления: дифференциальные уравнения, передаточная и переходная функции звеньев, виды соединения, частотные характеристики, критерии устойчивости САР, построение кривых переходного процесса, оценка качества регулирования и коррекция САР на примерах решения задач. Сформулированы требования к оформлению пояснительной записки, включены 8 заданий на курсовую работу.
Предназначено для студентов специальности 190901 – «Системы обеспечения движения поездов» всех форм обучения.
УДК 681.Б53
Учебно-методическое пособие написано с учетом требований ФГОС 190901 и реализует компентенции ПК-1, ПК-12, ПК-28. С3Б.10.
Печатается по решению редакционно-издательского совета университета.
Авторы: В. А. Баранов, доцент кафедры «Автоматика, телемеханика и связь на железнодорожном транспорте», канд. техн. наук, УрГУПС В. Л. Нестеров, профессор кафедры «Автоматика, телеме-
ханика и связь на железнодорожном транспорте», д-р техн. наук, УрГУПС Н. Л. Ракина, старший преподаватель кафедры «Автоматика,
телемеханика и связь на железнодорожном транспорте, УрГУПС
Рецензенты: Е. А. Малыгин, проректор по учебной работе, канд. техн. наук, УрГУПС С. А. Щиголев, зав. лабораторией «Автоматика и телеме-
ханика» УО ВНИИЖТ, генеральный директор ВНТЦ «Уралжелдоравтоматизация», канд. техн. наук
© Уральский государственный университет путей сообщения (УрГУПС), 2013
),0'(0$1"$
Общие указания к выполнению работы ........................................................ |
5 |
1. Экспериментальное определение параметров и характеристик звеньев .. |
6 |
1.1. Модель инерционного звена .............................................................. |
6 |
1.2. Модель реального дифференциального звена................................... |
7 |
1.3. Модель интегрирующего звена .......................................................... |
8 |
1.4. Модель колебательного звена ............................................................ |
9 |
1.5. Расчет параметров звеньев ............................................................... |
11 |
1.6. Инструкция по включению ПЭВМ и исследование звеньев.......... |
12 |
2. Дифференциальные уравнения, передаточная и переходная |
|
функции звеньев ........................................................................................... |
13 |
2.1. Определение дифференциального уравнения................................. |
13 |
2.2. Переходная и передаточная функции звена .................................... |
14 |
2.3. Параллельный и последовательный виды соединения звеньев...... |
16 |
2.4. Обратные связи. Положительная, отрицательная, гибкая |
|
и жесткая обратные связи ....................................................................... |
18 |
3. Частотные характеристики динамических звеньев и систем |
|
автоматического регулирования................................................................... |
20 |
3.1. Частотная передаточная функция. Амплитудно-фазовая |
|
частотная характеристика, амплитудная и фазовая частотные |
|
характеристики........................................................................................ |
20 |
3.2. Вещественная частотная характеристика ........................................ |
21 |
3.3. Логарифмические частотные характеристики ................................ |
21 |
4. Критерии устойчивости САР.................................................................... |
23 |
4.1. Понятие устойчивости, характеристическое уравнение................. |
23 |
4.2. Критерий Гурвица ............................................................................ |
23 |
4.3. Критерий Михайлова ....................................................................... |
24 |
5. Построение кривых переходного процесса.............................................. |
26 |
5.1. Классический метод решения дифференциальных уравнений...... |
26 |
5.2. Использование преобразования Лапласа и Карсона-Хевисайда.... |
27 |
6. Оценка качества регулирования ............................................................... |
29 |
6.1. Показатели качества переходных процессов................................... |
29 |
7. Коррекция САР ......................................................................................... |
35 |
7.1. Корректирующие устройства. |
|
Последовательные корректирующие устройства................................... |
36 |
7.2. Реальная интегрирующая цепь......................................................... |
38 |
3
7.3. Интегро-дифференцирующая цепь ................................................. |
39 |
7.4. Коррекция САР с помощью обратной связи................................... |
41 |
7.5. Пример коррекции САР с помощью обратной связи ..................... |
43 |
8. Задания на курсовую работу ..................................................................... |
46 |
Задание 1.................................................................................................. |
46 |
Задание 2.................................................................................................. |
58 |
Задание 3.................................................................................................. |
62 |
Задание 4.................................................................................................. |
66 |
Задание 5.................................................................................................. |
73 |
Задание 6.................................................................................................. |
76 |
Задание 7.................................................................................................. |
81 |
Задание 8.................................................................................................. |
84 |
Литература ..................................................................................................... |
90 |
4
)34"$-+'5'1"2+(&.)01$1"6/'3)#&
1.Цель работы состоит в том, чтобы овладеть навыками решения задач в области теории автоматического управления и выработать у студента умение формулировать требования к системам автоматики и самостоятельно решать задачи построения систем управления объектами.
2.Работа состоит из расчетно-пояснительной записки, включающей в себя необходимые рисунки и замечания, решения задач.
Записка должна содержать:
1.Титульный лист.
2.Введение.
3.Формулировку задачи.
4.Решение задачи.
5.Выводы (заключение).
6.Литературу.
Примерный объем расчетно-исполнительной записки – 15 руко-
писных страниц формата А4. Записка должна быть оформлена толь-
ко с одной стороны листа. Графические построения могут быть выполнены на миллиметровой бумаге, вшитой в общий текст записки. Все графические построения должны отвечать требованиям ГОСТов и ЕСКД.
5
1.7+!.$/"%$1#'081)$)./$9$0$1"$.'/'%$#/)(
":'/'+#$/"!#"+5($18$(
1.1.%;<=>?@A=BC@;AA;D;EF=AG
|
К1(p) |
|
R′ |
К |
(p) |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
i2 |
С |
|
|
|
|
|
R′2 |
|
|
|
|
|
|
|
R1 |
|
|
|
R2 |
|
|
|
|
|
|
|
|
|
Uвх(p) |
|
|
|
|
|
|
|
|
|
|
|
Uвых(p) |
||
|
i1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.1. Принципиальная схема инерционного звена |
|
|
|
||||||||||
|
В общем виде: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
# |
1 |
|
$R ' |
|
|
|
K ( p) ! U вых ( p) " # Z 2 ( p) |
|
|
|
|
|
|
|
pC |
1 |
||||
|
;K(p)=K (p)·K (p); К |
( р) ! |
|
|
|
; |
||||||||
|
U вх ( p) |
Z1 ( p) |
|
1 |
2 |
1 |
|
% |
1 |
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
$R1 |
|||||
|
|
|
|
|
|
|
|
( |
pC |
' R '1 ) |
||||
|
( р) ! # R '2 ; откуда К ( р) ! k |
|
|
|
|
* |
|
|
|
+ |
|
|||
К |
– это выражение совпадает с вы- |
|||||||||||||
2 |
R2 |
|
Тр '1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ражением для инерционной цепи, где К ! R '1 |
$R '2 , Т = R' |
1 |
· C. |
|
||||||||||
|
|
|
|
|
R1 |
$R2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Определяются 2 параметра К и Т. |
|
|
|
|
|
|
|
|
|
|
|||
а |
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
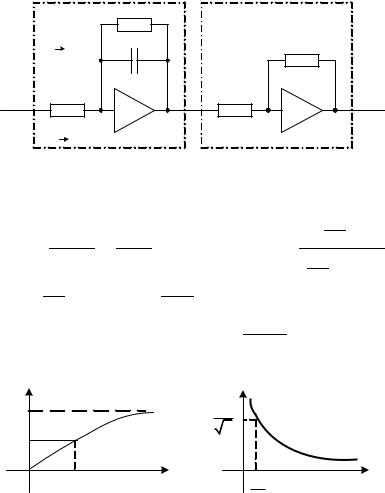
K h(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
K(ω) |
|
|
|
|
|
|
|
|
0, 63 K |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
T |
|
t |
|
1 |
|
|
|
|
|
|
|
ω |
|
T
Рис. 1.2. Кривые для расчета параметров К и Т:
а – переходная характеристика; б – амплитудно-частотная характеристика
6

Коэффициент усиления K находится как отношение выходного напряжения к входному, измеренных по истечении времени переходного процесса.
1.2.%;<=>?B=G>?A;D;<@HH=B=AC@G>?A;D;EF=AG
К |
(р) |
R ′ |
К2(р) |
|
R ′ |
1 |
|
1 |
|
2 |
|
Uвх(р) |
R1 |
|
R2 |
|
Uвых(р) |
|
|
|
|
|
|
К'1(р) |
R′ |
|
C |
К3(р) |
|
|
|
1 |
|
|
|
|
R′′ |
|
|
|
R3 |
|
1 |
|
|
|
|
Рис. 1.3. Принципиальная схема дифференциального звена
|
В общем виде: |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
К1 ( р) $К 2 ( р) |
|
|
|
|
|
' |
|
|
|
R'2 |
||
|
|
|
|
|
|
|
|
|
|
|
R 1 |
|
|
|
|
|
|
К ( р) ! |
|
|
|
|
; |
К1 |
( р) ! # |
; |
|
К 2 ( р) ! # ; |
|||||
|
|
|
|
|
|
|
||||||||||
|
|
1 # К '1 ( р) $К 2 ( р) $К |
3 ( р) |
|
R |
|
|
R2 |
||||||||
|
|
|
|
|
|
|
|
|||||||||
К |
( р) ! |
#1 |
; К ' ( р) ! # |
R'1 |
|
, откуда К ( р) ! |
k $ p |
– выражение |
||||||||
|
|
|
|
|
|
|||||||||||
3 |
|
рС $R3 |
1 |
R''1 |
|
|
|
|
|
Тр '1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||||
совпадает с выражением для реального дифференциального звена,
где K ! |
R''1 |
$R3 |
$C |
, Т ! |
R''1 |
$R2 $R3 |
$C |
. |
|
R1 |
|
|
R'2 $R'1 |
|
|||
|
|
|
|
|
|
|
Определяются параметры К и Т.
7
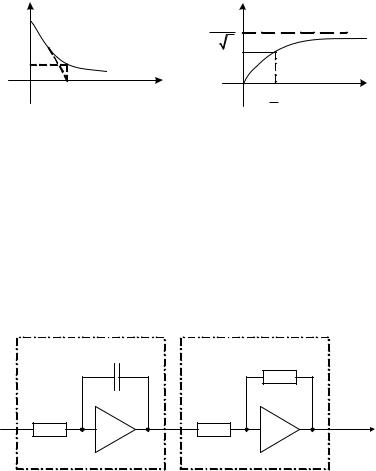
а |
|
б |
|
h(t) |
|
K(ω) |
|
|
|
|
|
|
|
K |
|
|
|
T 2 |
|
0,37K |
|
|
|
T |
t |
1 |
ω |
|
|
T |
|
Рис. 1.4. Кривые для расчета параметров К и Т :
а – переходная характеристика; б – амплитудно-частотная характеристика
Для определения Т надо замерить момент времени, в который характеристика звена достигает уровня 0,37 от начального скачка.
Т определяется проведением касательной к переходной кривой. Найдя постоянную времени Т и измерив начальный скачок (начальное максимальное значение амплитуды переходной характеристики), можно рассчитать коэффициент усиления как их произведение.
1.3.%;<=>?@AI=DB@BJKL=D;EF=AG
К1(р) |
К2(р) |
R′2 |
C |
|
|
R 1 |
R2 |
Uвых (p) |
Uвх (p) |
|
Рис. 1.5. Принципиальная схема интегрирующего звена
В общем виде: |
|
|
|
|
|
|
|
|
|
|
|
|
|||
K(p) = K |
(p) · K |
(p); |
К |
( р) ! # |
1 |
; |
К |
( р) ! # |
R '2 |
; откуда |
|||||
|
|
||||||||||||||
1 |
|
2 |
|
|
1 |
|
рС $R1 |
|
2 |
|
R2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
К ( р) ! |
k |
, где k ! |
1 |
$ |
R2, |
. |
|
|
|
|
|
||||
|
C $R1 |
|
|
|
|
|
|
||||||||
|
р |
|
|
R2 |
|
|
|
|
|
|
|
||||
8

Определяется только параметр К, он равен тангенсу угла наклона переходной характеристики и может быть найден, если зафиксировать момент времени ее пересечения с линией входного воздействия.
h(t) |
|
1 |
|
T |
t |
|
Рис.1.6. Переходная характеристика для определения параметра К
1.4.%;<=>?M;>=NGI=>?A;D;EF=AG
|
К1(р) R1′ |
К2(р) |
К3(р) |
|
|
|
C1 |
C2 |
|
|
R3′ |
|
|
|
|
|
|
|
R |
R2 |
R |
3 |
|
Uвх(p) |
1 |
|
|
Uвых(p) |
|
|
|
|
|
||
R1′ К4(р)
C1
R1″
Рис.1.7. Принципиальная схема колебательного звена
В общем виде: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
К1 -p .$К 2 -p .$К 3 -p . |
|
|
|
# |
1 |
$R , |
|
|||||||||
|
|
|
|
|
pC1 |
|
||||||||||||
К -p .! |
|
|
; К1 -p .! |
|
|
1 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
||
1 |
# К |
4 - |
p $ |
К |
2 - |
p $ |
К |
3 - |
p |
. |
% |
1 |
|
& |
||||
|
|
|
. |
|
. |
|
|
( |
' R1,)R1 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
* |
pC1 |
+ |
|
|||
9

|
|
|
|
|
|
|
|
|
|
|
# |
1 |
$R , |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
-p .! # |
1 |
|
|
-p .! # |
R3, |
|
|
-p .! |
|
|
|
pC1 |
1 |
|
|
|
К 2 |
|
; К 3 |
; К |
|
|
|
|
|
|
, |
|||||||
pC2 |
$R2 |
4 |
% |
1 |
|
|
& |
|
|||||||||
|
|
|
|
||||||||||||||
|
|
|
|
R |
|
|
|
|
|
|
|||||||
|
|
|
|
|
3 |
|
|
|
( |
|
|
|
' R1,)R1,, |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
* |
pC1 |
+ |
|
|
|||
откуда К -p .! |
|
К |
|
; где К ! |
R1,, |
; Т ! |
С С |
R3 |
$R2 |
$R1,, |
; |
|
' 2/Tp '1 |
|
|||||||||
T 2 p2 |
|
R1 |
1 2 |
|
R , |
|
|
||||
|
|
|
|
|
|
|
|
|
3 |
|
|
/ ! 1 C2
2R1, C1
a2 a2U вых (t )
at 2
|
R |
$R |
$R ,, |
% |
|
a2 |
|
a1 |
|
|||
$ |
2 |
3 |
1 |
|
|
(T |
! |
|
;/ ! |
|
|
|
|
|
|
|
|
||||||||
|
|
R3, |
|
|
|
( |
|
a0 |
|
2 a0 |
$a2 |
|
|
|
; |
* |
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||
+ a1 |
aU вых (t ) |
|
+ a0U вых (t ) = b0U вх (t ). |
|||||||||
at |
||||||||||||
|
|
|
|
|
|
|
|
|||||
b &
;K ! 0 ) a0 )+
Исследование рассмотренных характеристик производится путем снятия их переходных характеристик, а также их амплитудночастотной и фазо-частотной характеристик.
Определяются три параметра: K, T и /.
K – находится так же, как и для инерционного звена. T и коэф-
фициент затухания /0находятся через величину ! и момент времени tm достижения переходной характеристикой своего max значения.
|
|
|
|
|
|
|
h (t ) |
|
|
|
|
|
|
К |
|
|
|
||
|
|
|
|
|
1 |
|
hm |
h y |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
tm |
t |
|
|
|
|
|
|
|
|
|
||
|
Рис.1.8. Переходная характеристика колебательного звена |
||||||||
1 ! |
hm # hy |
; t |
|
! |
2 |
Постоянная времени и коэффициент затуха- |
|||
hy |
|
m |
3 |
||||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|||
ния: T ! tm |
1 # /2 |
/ ! |
#ln 1 |
. |
|||||
ln 1 2 ' 22 |
|||||||||
|
2 |
|
|
|
|
|
|
||
10