

Расчет и оптимизация процессов и аппаратов химических и пищевых производств в среде MatLab. Учебное пособие
.pdfКорни произвольного уравнения по заданному приближению позволяет найти встроенная функция fzero, которая вызывается следующим образом:
>> x = fzero(‘myfunction’, x0)
где ‘myfunction’ – имя файл-функции, вычисляющей левую часть уравнения; x0 – начальное приближение к корню либо вектор, содержащий концы отрезка, на котором ищутся корни; x – найденное приближенное значение корня. Данная функция находит решение с точностью до шестнадцатого знака после запятой.
Пример: Известна концентрация недиссоциированной кислоты [HA]0 – 0,1 моль–1; константа диссоциации Ka – 1,85 · 10–5; ионное произведение воды Kw – 1 · 10–14. Требуется определить кислотность рас-
твора. |
|
|
|
|
|
|
|
Зависимость |
pH |
|
от перечисленных функций представлена следующим уравнением: |
||||
[HA] = |
[H+ ]− Kw |
+ |
[H+ ]− |
Kw |
|
|
, где [H+ ] – концентрация ионов водорода. Значение pH – это отрицательный |
|
[H+ |
] |
|||||
0 |
Ka |
|
|
||||
десятичный логарифм концентрации ионов водорода: pH = −log(H + ) .
Функция, содержащая выражение для расчета pH, сохранена под именем concentr, а входным аргументом ее является значение концентрации ионов водорода.
function f = concentr(x)
% определение pH растворов слабых кислот
kw = 1.85e-5; ka = 1.0e-14; ha = 0.1;
f= (x^2-kw)/ka+x-(kw/x)-ha;
Впрограмме aim производится построение графика функции concentr для определения начального приближения, а затем решение нелинейного уравнения и определение pH.
%программа aim определения pH раствора
%построение графика функции для определения
%начального приближения
fplot ('concentr', [0 0.02]) grid on
%вызов fzero от файл-функции concentr, и точки приближения
%с определением значения функции в точке полученного решения
[H, f] = fzero('concentr', 0.004)
%расчет pH
pH = -log10(H)
Результаты поиска начального приближения приведены на рис. 6.2. Результаты реализации программы aim:
>> aim
H=
0.0043
f = -3.0669e-007 pH =
2.3664
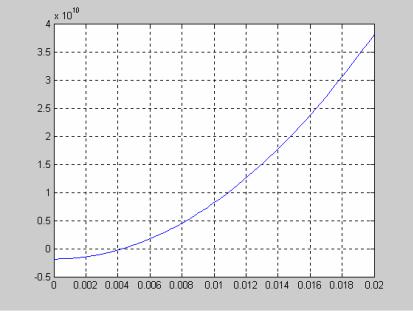
По графику легко определяется значение аргумента, близкого к нулю, которое является начальным приближением. Значение функции от полученного решения достаточно близко к нулю.
Решение систем линейных уравнений осуществляется при помощи символа «\», при этом система линейных уравнений представляется в матричном виде.
Рис. 6.2 Определение начального приближение для поиска корней уравнения
Пример: Требуется согласовать производство трех групп химических заводов, как по линии взаимных связей, так и по линии выполнения заданной им программы на производство конечной продукции. Исходные данные: программа на конечную продукцию каждой группы заводов и прогрессивные величины норм расходов этих продуктов как сырья для взаимного и собственного воспроизводства – представлены в табл. 8.
Математически согласованное производство по данным выпусков данных групп заводов с учетом прогрессивных норм расхода записывается в виде прогрессивных норм расхода или в матричной форме:
|
(1− a1,1)x1 − a1,2x2 |
− a1,3x3 |
= y1; |
||||||||||||||
|
|||||||||||||||||
|
− a2,1x1 − a2,2x2 − a2,3x3 |
= y2; |
|||||||||||||||
x2 |
|||||||||||||||||
x |
− a x − a x |
2 |
− a x |
= y |
3 |
; |
|
|
|||||||||
|
3 |
|
3,1 |
1 |
3,2 |
|
3,3 |
3 |
|
|
|
|
|
||||
|
−a1,2 |
|
−a1,3 |
|
x1 |
|
|
y1 |
|
. |
|||||||
1−a1,1 |
|
|
|
|
|
||||||||||||
−a2,1 |
1−a2,2 |
|
−a2,3 |
|
x2 |
= |
y2 |
|
|||||||||
−a1,3 |
−a3,2 |
1−a3,3 |
|
x3 |
|
|
y3 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 Исходные данные
|
|
Норма расхода, т/т |
|
||
|
|
|
|
|
Програм- |
|
|
Нефте- |
Химиче- |
Изделия |
|
|
|
химиче- |
ские |
из пла- |
ма на про- |
|
|
ские про- |
продук- |
дукцию |
|
|
|
стмассы |
|||
|
|
|
|||
|
|
дукты |
ты |
|
|
|
Нефтехи- |
|
|
|
|
|
мические |
0,08 |
0,04 |
0,01 |
50 000 |
|
заводы, x1 |
|
|
|
|
|
Заводы хи- |
0,07 |
0,06 |
0,02 |
30 000 |
|
мической |
||||
|
|
|
|
|
|
промыш- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ленности, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Заводы пе- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
реработки |
0,09 |
0,08 |
|
0,01 |
80 000 |
|
|
|
|
|
||||
пластмасс, |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
После подстановки исходных данных система имеет вид |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
0,92 |
−0,04 |
−0,01 |
|
|
x1 |
|
|
50 000 |
|
||
|
|
|
|
|
||||||||||
|
|
|
−0,07 |
0,94 |
−0,02 |
|
|
x2 |
= |
|
30 000 |
. |
||
|
|
|
−0,09 |
−0,08 |
0,99 |
|
|
x3 |
|
|
80 000 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решим данную задачу двумя возможными способами – с использованием матричных операций и оператора «\», и произведем проверку полученного решения. Расчет материального баланса приведен в листинге программы linesist.
%задание матрицы коэффициентов и столбца свободных членов линейной системы
A = [0.92 -0.04 -0.01; -0.07 0.94 -0.02; -0.09 -0.08 0.99]; B = [50000; 30000; 80000];
%решение системы с использованием матричных операций
X1 = A^-1*B
%решение системы с использованием оператора \ X2 = A\B
%проверка правильности результатов решений
REZ1 = A*X1 % решение, полученное с помощью матричных операций
REZ2 = A*X2 % решение, полученное с помощью оператора \
Результаты реализации программы linesist:
>> linesist
X1 =
1.0e+004 *
5.6970
3.8052
8.9062
X2 =
1.0e+004 *
5.6970
3.8052
8.9062
REZ1 = 1.0e+004 * 5.0000 3.0000 8.0000
REZ2 = 1.0e+004 * 5.0000 3.0000 8.0000
6.3 Вычисление корней полинома и производных от полинома
Полином задается вектором его коэффициентов, число элементов вектора, т.е. число коэффициентов полинома всегда на единицу больше его степени, нулевые коэффициенты должны содержаться в векторе.
Вычисление значения полинома от некоторого аргумента:
>>p = [1 0 3.2 -5.2 0 0.5 1 -3];
>>polyval(p, 3)
ans =
2.5479e+003
Нахождение сразу всех корней полинома осуществляется при помощи функции roots, которая возвращает вектор корней полинома, в том числе и комплексные.
>> r = roots(p)
r =
-0.5668 + 2.0698i -0.5668 – 2.0698i -0.6305 + 0.5534i -0.6305 – 0.5534i 1.2149
0.5898 + 0.6435i
0.5898 – 0.6435i
Встроенная функция polyder предназначена для вычисления производных от полиномов. Вызов polyder с аргументом – вектором, соответствующим полиному, приводит к вычислению вектора коэффициентов производной полинома:
>>p = [1 0 1 0 0 1];
>>p1 = polyder(p)
p1 =
5 0 3 0 0
6.4 Интегрирование функций
Для вычисления интеграла используется quad, задавая первым аргументом имя файл-функции, от которой вычисляется интеграл, а вторым и третьим – нижний и верхний предел интегрирования. Данная функция вычисляет приближенное значение интеграла с точностью 10е-3.
>> I = quad('myfunction', a, b)
Пример: Вычислить летучесть аммиака f как функцию давления при заданной температуре.
Наиболее точные значения коэффициента летучести получают из экспериментальных значений коэффициента сжимаемости, определяемого из P-V-T измерений. Зависимость сжимаемости аммиака от давления определена экспериментально (табл. 9).
Для вычисления летучести как функции давления при заданной температуре используется зависимость:
|
f |
P |
Z −1 |
|
|
ln |
= ∫ |
dP , |
|||
P |
P |
||||
|
|
0 |
|
|
где Z – функция сжимаемости газа; P – давление; f – летучесть аммиака. Вычислить летучесть и объем газа при заданных условиях.
9 Зависимость сжимаемости аммиака от давления
|
|
Функция |
|
|
Функция |
№ |
Давле- |
сжимае- |
№ опы- |
Давле- |
сжимае- |
опыта |
ние |
мости газа |
та |
ние |
мости газа |
|
|
Z |
|
|
Z |
1 |
1 |
0,998 |
9 |
100 |
0,801 |
2 |
10 |
0,981 |
10 |
200 |
0,551 |
|
|
|
|
|
|
3 |
20 |
0,961 |
11 |
300 |
0,462 |
4 |
30 |
0,942 |
12 |
400 |
0,495 |
5 |
40 |
0,922 |
13 |
500 |
0,557 |
|
|
|
|
|
|
6 |
50 |
0,902 |
14 |
600 |
0,621 |
7 |
60 |
0,882 |
15 |
800 |
0,755 |
|
|
|
|
|
|
8 |
80 |
0,841 |
|
|
|
В функции ammiak1 записывается подынтегральная функция
function f = ammiak1(p, z)
%расчет зависимости летучести аммиака
%z – независимый параметр (летучесть) f = (z-1)./p;
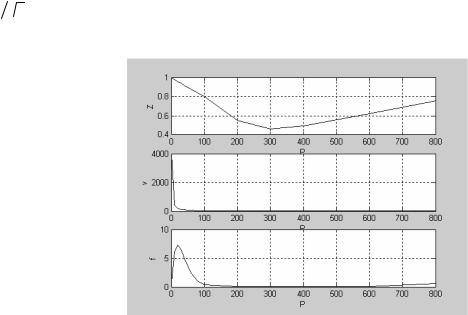
Процедура ammiak рассчитывает летучесть и объем газа, результаты расчета выводятся на графики в одно окно.
%программа ammiak расчета летучести аммиака
%в зависимости от давления
%с использованием оператора for
R = 8.31514; % универсальная газовая постоянная T = 473; % температура, К
% табличные данные
P = [0.001 1 10 20 30 40 50 60 80 100 200 300 ...
400 500 600 800];
Z = [0 0.998 0.981 0.961 0.942 0.922 0.902 0.882...
0.841 0.801 0.551 0.462 0.495 0.557 0.621 0.755]; % Расчет
for i=1:length(P)
I = quad('ammiak1', 1.0e-10, P(i), [], [], Z(i)); f(i) = P(i)*exp(I); % летучесть аммиака v(i) = (Z(i)*R*T)/P(i); % объем газа
end
% графический вывод результатов subplot(3,1,1)
plot ( P, Z, 'k-')
xlabel('P')
ylabel('Z') grid on subplot(3,1,2) plot ( P, v, 'k-') xlabel('P') ylabel('v') grid on subplot(3,1,3) plot ( P, f, 'k-') xlabel('P') ylabel('f') grid on
Результаты расчета на отдельных графиках представлены на рис. 6.3.
Реализованный алгоритм основан на квадратурной формуле Симпсона с автоматическим подбором шага интегрирования для достижения требуемой относительной погрешности. Интегрирование гладких функций лучше производить при помощи quad8, основанной на наиболее точных квадратурных формулах Ньютона-Котеса с автоматическим подбором шага.
При вычислении в MatLab 5.2, 5.3 интегралов от функций, имеющих интегрируемую особенность, например 1  x , в нуле выводится сообщение об ошибке. В версии 6.0 данный алгоритм улучшен для
x , в нуле выводится сообщение об ошибке. В версии 6.0 данный алгоритм улучшен для
функций с особенностями, и, кроме того, появился quadl для нахождения определенного интеграла по квадратурным формулам Гаусса-Лобатто.
Рис. 6.3 Результаты реализации программы ammiak
Также в MatLab имеются функции для вычисления двойных интегралов: dblquad. Используется следующим образом:
>> dblquad(‘myfunction’, a, b, c, d)
где a, b – нижний и верхний пределы внутреннего интеграла; c, d – нижний и верхний пределы наружного интеграла.
Также имеется возможность вычислять интегралы с переменным верхним пределом. Вычисление такого интеграла производится теми же функциями, что обычные определенные интегралы. Для нахождения такого интеграла пишутся две функции: для подынтегральной функции и находящую значения интеграла для каждого значения переменного верхнего предела (это число является входной переменной данной функции).
6.5 Интерполирование
Табличные данные очень часто удобно интерпретировать как некоторую функцию, в частности сплайн (полиномиальную) (рис. 6.4). Если возникает задача о построении полиномиальной или кусоч- но-полиномиальной функции для приближения некоторых исходных данных, то существуют в MatLab
встроенные функции для приближения сплайнами как одномерных, так и многомерных данных. Некоторые встроенные функции интерполирования в MatLab приведены в табл. 10.
10 Функции MatLab для интерполяции табличных данных
Функция |
Назначение |
|
Примечания |
|
||||
|
|
|
|
|
||||
P = polyfit(x, y, |
Приближение |
|
x, y – вектора, со- |
|||||
a) |
функции |
одной |
держащие |
таб- |
||||
|
переменной |
по |
лично |
заданную |
||||
|
методу наимень- |
функцию; a – чис- |
||||||
|
ших квадратов |
|
ло, равное степе- |
|||||
|
|
|
|
ни приближаю- |
||||
|
|
|
|
щего полинома |
|
|||
P = interp1(x, y, |
Приближение |
|
x, y – вектора, со- |
|||||
xi, ‘text’) |
функции |
одной |
держащие |
таб- |
||||
где text = |
переменной |
|
лично |
заданную |
||||
сплайнами. |
|
|
функцию; |
xi – |
||||
|
|
|
||||||
nearest |
Интерполяция |
по |
вектор, |
содержа- |
||||
|
соседним элемен- |
щий |
|
про- |
||||
|
межуточные |
рав- |
||||||
|
там. |
|
|
ноотстоящие точ- |
||||
linear |
Линейная |
интер- |
||||||
ки; text – способ |
||||||||
|
поляция. |
|
|
приближения |
||||
Spline |
Интерполяция |
|
функции |
|
|
|||
|
|
|
|
|
||||
|
кубическими |
|
|
|
|
|
||
|
сплайнами |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Продолжение табл. 10 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
||||
Функция |
Назначение |
|
Примечания |
|||||
|
|
|
|
|
||||
P = interp2(X, Y, |
Приближение |
|
X, Y, Z – вектора, |
|||||
Z, Xi, Yi, ‘text’) |
функции двух пе- |
содержащие |
таб- |
|||||
где text = |
ременной |
сплай- |
лично |
заданную |
||||
|
нами. |
|
|
функцию; Xi, Yi – |
||||
nearest |
Интерполяция |
по |
вектора, |
содер- |
||||
|
соседним элемен- |
жащие |
промежу- |
|||||
|
там. |
|
|
точные |
равноот- |
|||
bilinear |
Билинейная |
ин- |
стоящие |
точки; |
||||
text – способ при- |
||||||||
|
терполяция. |
|
ближения |
функ- |
||||
bicubic |
Интерполяция |
|
||||||
|
ции |
|
|
|
||||
|
бикубическими |
|
|
|
||||
|
|
|
|
|
||||
|
сплайнами |
|
|
|
|
|
|
|
Более подробно об интерполировании таблично заданных функций можно узнать из справочной системе MatLab.
Пример: Интерполяция таблично заданных функций.
%задание табличной функции x = [0.1 0.2 0.4 0.5 0.6 0.8 1.2]; y = [-3.5 -4.8 -2.1 0.2 0.9 2.3 3.7];
%задание промежуточных точек для интерполирования xi = [x(1):0.01:x(length(x))];
ynear = interp1(x, y, xi, 'nearest'); yline = interp1(x, y, xi, 'linear'); yspline = interp1(x, y, xi, 'spline');
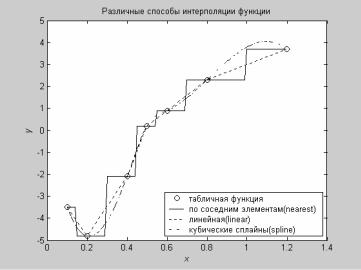
Рис. 6.4 Различные способы интерполяции функции одной переменной
6.6Оптимизация
Всостав MatLab входят функции, предназначенные для решения линейных и нелинейных, безусловных и условных оптимизационных задач. Основные функции оптимизации приведены в табл. 11.
11 Основные функции MatLab для решения задач оптимизации
Функция |
Применение |
|
Примеча- |
||
|
ние |
||||
|
|
|
|
||
|
Безусловная оптимизация |
|
|
||
fmin(‘F’,x1,x |
Поиск локального минимума |
В поздних |
|||
2,… |
функции одной переменной. |
версиях |
|||
op- |
'F' – имя файл-функции; x1,x2 |
перенесен |
|||
tions,P1,P2) |
– левая и правая границы ин- |
в fminbnd |
|||
|
тервала, на котором ищется |
|
|
||
|
минимум; options – параметры |
|
|
||
|
управления |
процессом |
реше- |
|
|
|
ния; P1,P2 – независимые па- |
|
|
||
|
раметры |
|
|
|
|
fminbnd(‘F’, |
Поиск локального минимума |
Для |
вер- |
||
x1,x2,… |
функции одной переменной на |
сий 6.x |
|||
op- |
заданном интервале. Приме- |
|
|
||
tions,P1,P2) |
нение аналогично fmin |
|
|
|
|
fmins(‘F’,X0, |
Поиск локального минимума |
В поздних |
|||
… |
функции нескольких перемен- |
версиях |
|||
op- |
ных. 'F' – имя файл-функции; |
перенесен |
|||
tions,P1,P2) |
X0 – вектор начальных при- |
в |
fmin- |
||
|
ближений; options – параметры |
search |
|||
|
управления |
процессом |
реше- |
|
|
|
ния; P1,P2 – независимые па- |
|
|
||
|
раметры |
|
|
|
|
fmin- |
Поиск локального минимума |
Использу- |
|||
search(‘F’,X0 |
функции нескольких перемен- |
ет |
сим- |
||
,… |
ных. Применение аналогично |
плексные |
|||
op- |
fmins |
|
|
методы. |
|
tions,P1,P2) |
|
|
|
Для |
вер- |
|
|
|
|
сий 6.x |
|
fmin- |
Поиск минимума нелинейной |
Использу- |
|||
unc(‘F’,X0, |
функции нескольких перемен- |
ет |
ква- |
… |
ных без ограничения на пере- |
зиньюто- |
|
op- |
менные. Применение анало- |
новские |
|
tions,P1,P2) |
гично fmins |
методы. |
|
|
|
Для |
вер- |
|
|
сий 6.x |
|
linprog(f,A,b,…
Aeq,Beq,LB,
…
UB,X0,optio
ns)
Условная оптимизация |
|
Решение задач линейного про- |
Для вер- |
граммирования. f – вектор ко- |
сий 6.x |
эффициентов; A,b,Aeq,Beq – |
|
вектора коэффициентов нели- |
|
нейных и линейных ограниче- |
|
ний; LB,UB – вектора верхних |
|
и нижних границ изменения |
|
переменных; X0 – вектор на- |
|
чальных приближений; options |
|
– параметры управления про- |
|
цессом решения |
|
Продолжение табл. 11
Функция |
Применение |
Примеча- |
||
ние |
||||
|
|
|
||
quad- |
Решение задач квадратичного |
Для версий |
||
prog(H,f,A,b, |
программирования. H– вектор |
6.x |
||
… |
соответствующих |
коэффици- |
|
|
Aeq,Beq,LB, |
ентов, остальные параметры – |
|
||
UB,… |
аналогично linprog |
|
||
X0,options) |
|
|
|
|
fmin- |
Решение задач |
нелинейного |
Для версий |
|
con(‘fun’,X0, |
программирования. ‘fun’ – имя |
6.x |
||
A,B,… |
файл-функции, содержащей |
|
||
Aeq,Beq,LB, |
целевую функцию, ’nonlcon’ – |
|
||
UB,… |
имя файл-функции, содержа- |
|
||
’nonl- |
щей нелинейные ограничения, |
|
||
остальные параметры – анало- |
|
|||
con’,options, |
|
|||
гично linprog |
|
|
||
… |
|
|
|
|
P1,P2) |
|
|
|
|
fmini- |
Решение минимаксной задачи. |
Для версий |
||
max(‘fun’,X0 |
Применение аналогично fmin- |
6.x |
||
,… |
con |
|
|
|
A,B,Aeq,Beq |
|
|
|
|
,LB,UB,… |
|
|
|
|
’nonl- |
|
|
|
|
con’,options, |
|
|
|
|
… |
|
|
|
|
P1,P2) |
|
|
|
|
fgoalat- |
Решение задачи о достижении |
Для вер- |
||
tain(‘fun’,X0, |
границы. Решается задача ви- |
сий 6.x |
||
…да F(x)−wγ ≤ g . Остальные па-
g,w,A,B,Aeq, раметры аналогичны fmincon. Beq,…
LB,UB,’nonl
con’,… op-
tions,P1,P2)
1Безусловная минимизация функций. Минимизация функции одной переменной производится
спомощью команды fminbnd. Данная команда определяет локальный минимум в точке, близкой к точке приближения. Использование этой команды аналогично использованию команды fzero.
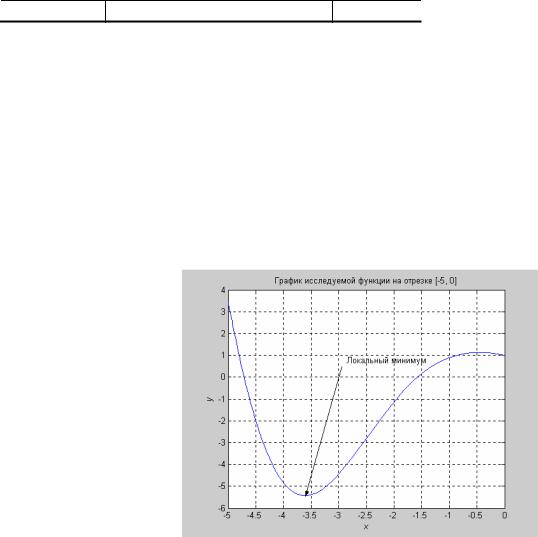
Пример: Найти локальный минимум уравнения sinx−x2 cos(x)=0 на отрезке [–5, 0]. Исследуемая функция сохраняется в файл-функции 'myf', график исследуемой функции представлен на рис. 6.5.
>> x = fminbnd('myf', -5, 0)
x=
-3.6052
Рис. 6.5 Иллюстрация к примеру
Если необходимо найти безусловный минимум функции нескольких переменных, то используется команда fminsearch. перед применением fminsearch необходимо создать файл-функцию, вычисляющую значения искомой функции, причем аргументом данной функции должен быть вектор, элементы которого являются аргументами минимизируемой функции.
Пример. Определить локальный минимум функции
Сначала исследуем поведение данной функции для определения хорошего начального приближения. Для этого построим линии равного уровня исследуемой функции (рис. 6.6).
Файл-функция для оптимизации: function f = ftest(arg)
x = arg(1); y = arg(2);
f = sin(pi*x).*sin(pi*y);
Зная начальное приближение (определяется из графика на рис. 6.6), можно вызвать функцию fminsearch (указывая вектор начального приближения).
>> M = fminsearch('ftest', [1.4, 0.6])
M =
1.5000 0.5000