

Студентам_датчики / Датчики / Лекция 6(1)
.pdfЛекция №6. ДАТЧИКИ МАГНИТНОГО ПОЛЯ.
6.1. Принципы построения приборов для измерения магнитных полей.
Как правило, прибор для измерения магнитных величин состоит из двух
частей — измерительного преобразователя, назначением |
которого |
является |
||||
преобразование магнитной величины в величину иного вида(электрическую, |
||||||
механическую), более удобную для дальнейших операций, и измерительного |
||||||
устройства для измерения выходной величины измерительного преобразователя. |
||||||
Измерительные |
преобразователи, |
входной величиной |
которых |
является |
||
магнитная |
величина, |
называют магнитоизмерительными и в соответствии с |
||||
видом |
выходной |
величины |
делятся |
на |
три |
основные: |
магнитоэлектрические |
преобразователи (выходная |
величина электрическая), |
||||
магнитомеханические (выходная величина механическая) и магнитооптические (выходная величина оптическая).
В каждой из этих групп много разновидностей преобразователей, основой для создания которых служат те или иные физические явления. В качестве
основных, наиболее широко используемых явлений могут быть назван следующие:
·явление электромагнитной индукции;
·силовое взаимодействие измеряемого магнитного поля с полем постоянного магнита или контура с током;
·гальваномагнитные явления;
·явление изменения магнитных свойств материалов в магнитном поле;
·явления, возникающие при взаимодействии микрочастиц с магнитным полем.
Основная область применения магнитоизмерительных приборов геофизике – измерение направления и напряженности естественного поля Земли в разведочной и скважинной геофизике, искусственного магнитного поля в столе скважины, исследование магнитных свойств горных пород и металла колонны и др.
Наиболее широкое распространение в геофизике в качестве первичного преобразователя магнитного поля в электрический сигнал(датчика) получил феррозонд.
6.2. Приборы для измерения параметров магнитного поля.
Феррозонд, прибор для измерения напряжённости магнитных полей(в основном постоянных или медленно меняющихся) и их градиентов. Действие феррозонда основано на смещении петли перемагничивания магнитно-мягких материалов под влиянием внешнего магнитного поля. В простейшем варианте феррозонд состоит из стержневого ферромагнитного сердечника и находящихся на нём двух катушек: катушки возбуждения, питаемой переменным током и

измерительной |
(сигнальной) катушки. В отсутствие измеряемого магнитного |
|
|||||||||
поля сердечник под действием переменного |
магнитного |
,полясоздаваемого |
|
||||||||
током в катушке возбуждения, перемагничивается по симметричному циклу. |
|
||||||||||
Изменение |
магнитного |
потока |
в |
сигнальной , |
вызванноекатушке |
|
|||||
перемагничиванием |
сердечника |
по |
симметричному |
,циклуиндуцирует в |
|
||||||
сигнальной катушке эдс, изменяющуюся по |
гармоническому |
закону. Если |
|
||||||||
одновременно |
на |
сердечник |
действует |
измеряемое |
постоянное |
или |
сла |
||||
меняющееся |
магнитное поле, то кривая |
перемагничивания |
сдвигается |
и |
|||||||
становится несимметричной. При этом изменяются величина и гармоничность |
|
||||||||||
эдс индукции в сигнальной катушке. В |
частности, |
появляются |
чётные |
|
|||||||
гармонические |
составляющие эдс, |
величина |
которых |
пропорциональна |
|||||||
напряжённости |
измеряемого поля(они |
отсутствуют при |
симметричном цикле |
|
|||||||
перемагничивания). Как правило, феррозонд состоит из двух сердечников с обмотками, которые соединены так, что нечётные гармонические составляющие
практически |
|
компенсируются. Тем |
самым |
упрощается |
измерительная |
|||
аппаратура и повышается чувствительность феррозонда. |
|
|
|
|||||
Наиболее |
распространённые |
феррозондовые |
установки |
включаю: |
||||
генератор переменного тока, питающий обмотку возбуждения; фильтр для |
||||||||
нечётных |
гармонических |
составляющихэдс, |
подключённый |
на |
выходе |
|||
измерительной |
катушки; |
усилитель |
чётных |
гармоник |
и |
выход |
||
измерительный прибор. (рис. 6.1.) |
|
|
|
|
|
|||
Рис.6.1.Феррозондовый магнитометр, предназначенный для измерения магнитного поля Земли и устанавливаемый на летательных аппаратах.
Рис. 6.2 Переносной феррозондовый магнитометр с выносным зондом и индикатором
Феррозонды обладают очень высокой чувствительностью к магнитному полю (до 10-4 —10-5 А/м), применяют для измерения магнитного поля Земли и его вариаций (в частности, при поисках полезных ископаемых, создающих локальные аномалии геомагнитные поля); для измерения магнитных полей Луны, планет и межпланетного пространства; для обнаружения ферромагнитных предметов и частиц в неферромагнитной среде(в частности, в хирургии при извлечении металлических осколков), в магнитной дефектоскопии и т. д.
В промысловой геофизике феррозондовый датчик магнитного пол используется для детектирования магнитных меток, нанесенных на каротажный кабель, с целью привязки положения скважинной аппаратуры к глубин скважины.
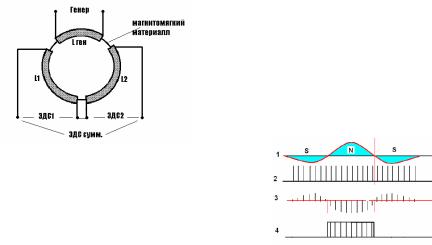
Конструкция такого феррозонда приведена на рисунке6.3 и состоит из трех обмоток на тонком ферромагнитном сердечнике торроидальной формы.
Кис. 6.3. Феррозонд и эпюры напряжений на обмотках.
Торроидальный сердечник с высоким значением коэффициента магнитной проницаемости m.
L ген=200 – 300 вит.
L1 = L2 »1000 вит.
Эпюры ЭДС на контрольных точках:
1.Напряженность внешнего магнитного поля.
2.Форма импульса на генераторной катушке.
3.ЭДС суммарная на приемных катушках.
4.Результат обработки.
Данный |
датчик |
не |
предназначен |
для |
измерения |
напряжен |
магнитного |
поля, а |
является |
индикаторным. Однако, |
возможна |
оценка |
|
напряженности поля путем измерения суммарной амплитуды выходного сигнала на приемных катушках. Причем, катушки L1 и L2 включены так, что при отсутствии внешнего магнитного поляэдс первой катушки компенсируетэдс
второй. Внешнее магнитное поле приводит к возникновению разбалланса выходных эдс и возникновению сигнала, амплитуда которого пропорциональна напряженности исследуемого магнитного поля.
Для выделения переменной составляющей компенсации постоянного внешнего магнитного поля в данной схеме феррозонда проводится путе
пропускания |
через |
генераторную |
катушку |
постоянного, котокарый |
возбуждает в торроиде постоянное магнитное поле, компенсирующее внешнее. |
||||
Гальваномагнитные |
преобразователи |
основаны |
на явлении искривления |
|
траектории электрических зарядов, движущихся в магнитном полеHизм, под действием силы Лоренца. К этой группе относятся: датчики на эффекте Холла (возникновении между гранями проводящей пластинки разности потенциалов, пропорциональной протекающему току иHизм); на эффекте Гаусса(изменении сопротивления проводника в поперечном магнитном полеHизм Dr/r0 » Aф(mb)m,

где Aф – коэффициент формы, m - магнитная проницаемость, b - напряженность |
|
|||||||
магнитного |
поля, m = 1 при mb >> 1); на явлении падения анодного тока в |
|
||||||
магнетронах |
и |
электроннолучевых |
трубках(вызванного |
искривлением |
|
|||
траектории электронов в магнитном поле) и др. |
|
|
|
|
||||
В |
промышленности |
для |
измерения |
магнитного |
поля |
шир |
||
распространение получили датчики на основе эффекта Холла, изготавливаемые |
|
|||||||
методами микроэлектроники и обладающие высокой чувствительностью при весьма малых размерах.
Принципиальная схема датчика магнитного поля на эффекте Холла (датчик Холла), приведена на рис. 6.4.
В датчиках холла выполняется соотношение
ЭДСх =f (I, B),
где ЭДСх – регистрируемое выходное значение эдс на постоянной нагрузке, I – величина тока, пропускаемая по датчику, B - измеряемая магнитная индукция.
Рис.6.4.Датчик магнитного поля на эффекте Холла
На эффекте Холла основано действие различного рода тесламетро (магнитометров) для измерения постоянных, переменных и импульсных магнитных полей (с В ~10-4—10-5 Тл,); градиентометров и приборов для исследования магнитных свойств материалов.
Чувствительность датчиков, работающих на основе эффекта Гаусса, достигает 10 мкВ/Тл; у электронно-вакуумных приборов минимально регистрируемая напряженность магнитного поля достигает ~ 30 нТл.
6.3. Приборы для исследования магнитных характеристик среды.
Следующая разновидность датчиков, распространенных в скважинной геофизике и использующих магнитное поле для изучения характерист
эксплуатационной колонны – магнитный |
локатор |
сплошности |
колонны(или |
||
локатор муфт - ЛМ). Данное устройство нашло широкое применение, прежде |
|||||
всего для привязки положения скважинного прибора к конструкции скважины, |
|||||
обсаженной |
стальной |
колонной. В |
приборе |
используется |
искусственно |
создаваемое постоянное магнитное поле, взаимодействующее с окружающим металлом.
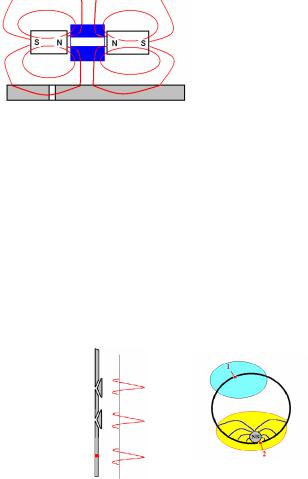
Рис. 6.5. Принципиальная схема магнитного локатора сплошности колонны.
Принцип |
работы магнитного локатора(МЛ) поясним по |
рис. 6.5. |
Два |
|
постоянных |
магнита (S-N) жестко |
закреплены ,такчтобы |
лни |
были |
ориентированы друг к другу одноименными полюсами. При этом, линии магнитного поля из пространства между ними будут направлены далеко за пределы объема, занимаемого самими магнитами. Поместив между магнитами катушку с большим числом витков(1000 – 2000), получим электромагнитную систему, чутко реагирующую на изменение магнитных свойств окружающей среды в пределах распространения магнитных , линийпронизывающих измерительную катушку. Амплитуда сигнала на катушке, согласно закона
Фарадея Uэдс » (d Ф/ dT).
Поскольку данное устройство движется в составе скважинного прибора по стволу скважины, то любое изменение магнитных свойств металла колонны (отверстие, трещина, муфтовое соединение), приведет к искажению формы магнитных линий и вызовет возникновению эдс на измерительной катушке, рис. 6.6.
Рис. 6.6. Реакция |
Рис.6.7 Ограничение |
ЛМ на муфтовые |
области охвата ЛМ в |
соединения |
стволе скважины. |
К сожалению, МЛ не обеспечивает безусловного детектирования перфорационных отверстий в связи с ограниченным диапазоном охвата по периметру (рис.6.7) ввиду замыкания магнитных линий на ближнюю зону. В связи с этим, низка эффективность локатора муфт и при выделении продольных трещин в металле эксплуатационной колонны. Кроме того, амплитуда
выходного сигнала ЛМ зависит и от скорости движения прибора по стволу скважины.
В большинстве случаев, выделение интервалов перфорации колонны в виде повышенного уровня шумов(рис.6.8), происходит в связи с изменением радиуса колонны за счет ее вздутия от фугасного воздействия кумулятивного перфоратора. Другая причина повышенного уровня шумов в зоне перфорации– колебания скважинного прибора относительно стенки скважины при зацепах на кромках перфорационных отверстий или колебания, вызванные турбулентным потоком жидкости.
,Глубина |
Скв.18 |
|
|
Скв.879 |
|
|
Скв.166 |
|
|
пл.Культюб инская |
|
|
пл.Сергеевская |
|
|
пл.Узыбашевская |
|
||
1.06.1997 г. |
|
|
11.02.1998 г. |
|
|
1.10.1997 г. |
|
||
ЛМ |
8 |
6 |
ЛМ |
18 |
8 |
ЛМ |
88 |
||
0 |
|||||||||
м |
|
|
|
|
|
|
|
|
|
|
ед |
|
|
ед |
|
|
ед |
|
|
1180 |
|
|
|
|
|
|
|
|
|
1200 |
|
|
|
|
|
|
|
|
|
1220 |
|
|
|
|
|
|
|
|
|
1240 |
|
|
|
|
|
|
|
|
|
1260 |
|
|
|
|
|
|
|
|
|
1280 |
|
|
|
|
|
|
|
|
|
1300 |
|
|
|
|
|
|
|
|
|
1320 |
|
|
|
|
|
|
|
|
|
1340 |
|
|
|
|
|
|
|
|
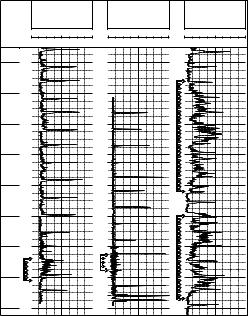
Рис.6.8. Пример |
работы канала локатора муфт аппаратуры АГАТ К-9 в |
скважинных условиях. |
Реакция ЛМ на перфорационные отверстия проявляетс |
хаотичными всплесками. Исходная информация прошла детектирование и представлена в однополярном виде встроенным преобразователем.