

лабы по тоэ1 / лаб1 / пид (Автосохраненный)
.docx-
ВВЕДЕНИЕ
1910 году был изобретён ПИД-регулятор. А в 1942 году, разработали методику его настройки Никольс и Зиглер. После того как в 1980-х годах появились микропроцессоры, развитие ПИД-регуляторов происходит нарастающими темпами. ПИД-регулятор относится к наиболее распространённому типу регуляторов. Около 90-95% регуляторов, эксплуатируемые в настоящее время, используют ПИД-алгоритм. Причина столь высокой популярности в простоте построения и промышленного использования, ясности функционирования, пригодности для решения большинства практических задач и низкой стоимости. 64% ПИД-регуляторов приходится на одноконтурные регуляторы и на многоконтурные. Контроллеры с обратной связью охватывают 85% всех приложений, контроллеры с прямой связью – 6%, и контроллеры, соединённые каскадно, – 9% . После появления дешёвых микропроцессоров и аналого-цифровых преобразователей в промышленных ПИД-регуляторах используются автоматическая настройка параметров, адаптивные алгоритмы, нейронные сети, генетические алгоритмы, методы нечёткой логики. Усложнилась структура регуляторов: появились регуляторы с двумя степенями свободы, с применением принципов разомкнутого управления в сочетании с обратной связью, со встроенной моделью процесса. Кроме функции регулирования, в ПИД-контроллер были введены функции аварийной сигнализации, контроля разрыва контура регулирования, выхода за границы динамического диапазона и др. Несмотря на долгую историю развития и большое количество публикаций, остаются проблемы в вопросах устранения интегрального насыщения, регулирования объектов с гистерезисом и нелинейностями, автоматической настройки и адаптации. Практические реализации ПИД-контроллеров не всегда содержат антиалиасные фильтры, чрезмерный шум и внешние возмущения затрудняют настройку параметров. Проблемы усложняются тем, что в современных системах управления динамика часто неизвестна, регулируемые процессы нельзя считать независимыми, измерения сильно зашумлены, нагрузка непостоянна, технологические процессы непрерывны.
ПИД-регулятор
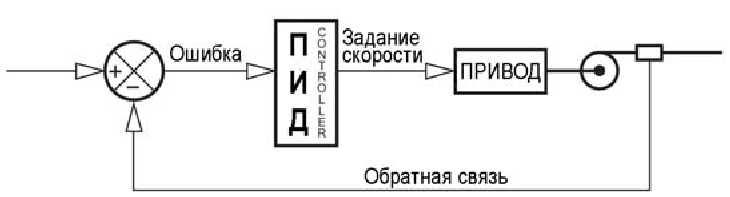
Для системных процессов часто требуется чтобы контролируемые параметры (например,
скорость мотора) были способны быстро реагировать на внешние воздействия и поддерживать
другие системные константы (давление, поток, температура, и т.п.).
Один из самых общих видов регуляторов использует алгоритм ПИД-
регулирования.
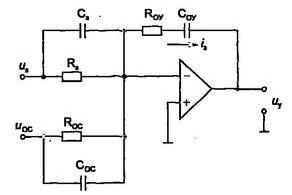
Пропорционально-интегрально-диеренциальный регулятор в простейшем случае реализуется включением в ПИ-регулятор, параллельно резистрам Rз и Rос конденсаоров Cз и Cос.
В нем используется 3 составляющих вида регуляторов для устранения ошибок:
Пропорциональный, Интегральный и Дифференциальный регулятор.
Пропорциональный регулятор
Пропорциональный регулятор является основным, где задание скорости прямо
пропорционально ошибке. Если используется только пропорциональный регулятор, то в системе
всегда будет ошибка. Низкие значения пропорционального коэффициента регулятора приводят к
«вялости» системы, а слишком высокие приводят к нестабильности и колебаниям в системе.

Интегральный регулятор
Интегральный регулятор используется для исключения ошибки. Скорость будет расти до
момента исключения ошибки (или уменьшаться при отрицательной ошибке). Малые значения
интегральной составляющей значительно влияют на работу регулятора в целом. Если
установлено слишком высокое значение – система промахнется, и будет работать с
перерегулированием.

Дифференциальный регулятор
Дифференциальный регулятор, оценивая скорость изменения ошибки, используется для
увеличения быстродействия системы. Он и повышает быстродействие регулятора в целом.
Однако с повышением быстродействия регулятора также увеличивается и его перерегулирование,
что приводит к нестабильности системы. В большинстве случаев, дифференциальная
составляющая устанавливается нулевой или близкой к некоторому очень низкому значению для
предотвращения этого. Однако она может быть очень полезной в системах позиционирования.

Прямое и обратное действие регуляторов
Большинство регуляторов «прямого действия». То есть, увеличение скорости мотора приводит к
увеличению переменной процесса. Это случай в насосной системе, где давление это переменная
процесса; увеличение скорости мотора приводит к увеличению давления. Но в некоторых
системах увеличение скорости мотора приводит к уменьшению переменной процесса. Например,
температура жидкости обдуваемого вентилятором теплообменника - переменная процесса; при
увеличении скорости вентилятора температура жидкости уменьшается! В данном случае,
необходимо использовать регулятор «обратного действия».
Настройка ПИД-регулятора
Для систем управления мотором настройка ПИД-регулятора может быть сложной. Нижеописанные
шаги настройки помогут упростить этот процесс:
1. Установите интегральную и дифференциальную составляющие в ноль. Задавайте максимум
скорости и наблюдайте за реакцией системы.
2. Увеличьте пропорциональную составляющую и повторите шаг 1. Продолжайте до тех пор,
пока не начнется автоколебательный процесс в районе точки задания скорости.
3. Уменьшайте пропорциональную составляющую, пока система не станет стабильной.
Колебания станут затухающими.
4. Установите пропорциональную составляющую примерно на 15% ниже этого устойчивого
пункта.
5. Задавайте ступенчато максимальную скорость; увеличивайте интегральную составляющую
до тех пор, пока не начнутся затухающие колебания скорости перед стабилизацией. Уменьшайте
интегральную составляющую до тех пор, пока система не достигнет заданной скорости без
колебаний или ошибки.
6. В большинстве систем, настройка дифференциальной составляющей не требуется. Если от
системы требуется большее быстродействие, то этого возможно достичь, настраивая
дифференциальную составляющую. Задавайте ступенчато скорость; увеличивайте
дифференциальную составляющую, пока система остается стабильной с минимальным временем
отработки (увеличивайте медленно, чтобы избежать нестабильного состояния). Система будет
оптимальной при наличии одного перерегулирования.
7. Проверьте систему на стабильность, задавая ступенчато различные значения скорости,
чтобы гарантировать, что при наихудшей отработке задания система является стабильной.
Алгоритм стандартного ПИД регулятора
Наиболее распространен в промышленности ПИД (пропорционально-интегрально-дифференциальный) алгоритм регулирования, например для управления теплотехническими, гидродинамическими и массообменными процессами. Параметр, который регулируется, рассматривается как переменная процесса (температура, давление, расход). Оператор вводит задание, т.е. требуемое значение переменной процесса. ПИД-регулятор определяет значение управляющего воздействия, например, мощность обогрева или положение регулирующего клапана. Это значение влияет на переменную процесса и приводит ее к заданному значению.
В стандартном ПИД-регуляторе LabVIEW, для сравнения задания (SP) и значения переменной процесса (PV) определяется значение рассогласования (е):
![]()
Общая теоретическая формула расчета управляющего значения по ПИД закону, как известно, выглядит как

где Kc — коэффициент пропорциональности регулятора, Ti — время интегрирования в минутах (так называемое время изодрома), а Td — время дифференцирования в минутах.
Пропорциональная составляющая управляющего воздействия определяется регулятором как:
![]()
при этом интегральная составляющая равняется:
а дифференциальная составляющая:
![]()
Ниже описываются процедуры, которые используются в алгоритме ПИД-регулятора библиотеки и могут быть при необходимости отключены или изменены пользователем.
Фильтрация переменной процесса
Процедура фильтрации снижает влияние шума:
![]()
Особенности расчета рассогласования
Рассогласование, используемое для подсчета интегральной и дифференциальной составляющей, рассчитывается следующим образом:

Рассогласование для расчета пропорционального действия имеет вид:

где SPrng - диапазон изменения задания, β - фактор задания, а L - параметр, определяющий степень нелинейности регулятора. Если L равно 1 то регулятор линейный. Значение L = 0,1 минимизирует коэффициент передачи регулятора до 10% Kc в области приближения переменной процесса к заданному значению. Такой подход позволяет использовать нелинейное регулирование, когда коэффициенты настройки регулятора изменяются в зависимости от отклонения.
Пропорциональная составляющая
В реальных системах регулирования изменения задания обычно значительно превышают и носят более резкий характер, чем помехи, которые возникают, как малые отклонения регулируемой величины от задания. Настройка ПИД-регулятора на высокую чувствительность к рабочим помехам часто приводит к недопустимым колебаниям регулируемой величины с возможным выходом за границу устойчивости. С другой стороны, настройка на высокую чувствительность к заданию может приводить к замедлению реакции на возникающие помехи. Если фактор β установить меньше единицы, то скачки чувствительности к заданию уменьшатся без влияния на чувствительность к рабочим помехам. Данный фактор относится к ПИД алгоритму “Двух Степеней Свободы”. в представляет собою индекс чувствительности к заданию, принимая значения от 0 до 1. Например, если больше важны рабочие характеристики устойчивости, присвойте значение β = 0. Соответственно, если необходимо чтобы переменная процесса стремилась к заданию быстро, следует приравнять β к 1. Таким образом, уточненный расчет пропорциональной составляющей производится в соответствии с формулой:
![]()
Интегрирование методом трапеций
Интегрирование методом трапеций применяется для избегания резких перемен в интегральной составляющей, когда изменение значений переменных PV или SP носит колебательный характер. Как видно из формулы и графика, чем больше рассогласование, тем меньше интегральная составляющая.
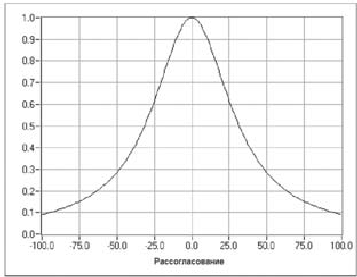
Нелинейный множитель для интегральной составляющей (SPrng= 100)
Расчет дифференциальной составляющей
Из-за резких изменений задания, дифференциальное действие применяется только к фильтрованному значению регулируемого параметра, а не к рассогласованию.

Управляющее воздействие регулятора
Выход регулятора представляет собой сумму пропорциональной, интегральной и дифференциальной составляющих.
![]()
Ограничение выхода
Фактическое значение управляющего воздействия ограничено диапазоном, установленным для выхода регулятора:
- если u(k) > umax, то u(k) = umax;
- если u(k) < umin, то u(k) = umin.
Таким образом, реальная модель ПИД-регулятора будет иметь вид:

Эффект Холла
Этот эффект был открыт Е.Холлом в 1879 г.. Сущность явления заключается в следующем. Если металлическую или полупроводниковую пластину, по которой проходит ток, поместить в магнитное поле, направленное перпендикулярно
линиям тока , то в ней возникает разность потенциалов в направлении перпендикулярном току и магнитному полю.
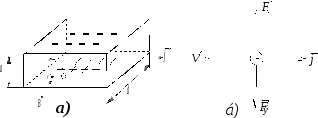
Схема возникновения эффекта Холла.
В основе эффекта лежит взаимодействие между электрическими зарядами и магнитными полями. Любая заряженная частица, движущаяся в магнитном поле, испытывает действие силы Лоренца, направление которой перпендикулярно направлению движения частицы и направлению магнитного поля. Величина этой силы прямо пропорциональна величине заряда q, скорости частицы v и индукции магнитного поля
 .
(1).
.
(1).
Для
металлов и для полупроводников n-типа
q=e,
где
e-
заряд электрона. Под действием силы
Лоренца электроны отклоняются к верхней
грани и заряжают ее отрицательно. На
противоположной грани остается
нескомпенсированный положительный
заряд ионов кристаллической решетки.
В результате этого в пластине возникает
поперечное электрическое поле,
направленное снизу вверх. Обозначим
напряженность образовавшегося
электрического поля через
 . Сила
. Сила
 ,
действующая со стороны электрического
поля на заряд, направлена в сторону,
противоположную направлению силы
Лоренца
,
действующая со стороны электрического
поля на заряд, направлена в сторону,
противоположную направлению силы
Лоренца
 .
Возникшая
вследствие этого поперечная разность
потенциалов U
называется ЭДС Холла.
.
Возникшая
вследствие этого поперечная разность
потенциалов U
называется ЭДС Холла.
ЭДС Холла зависит от величины проходящего тока, индукции магнитного поля, ширины пластины и концентрации носителей заряда. Зависимость от концентрации говорит о том, что в металлах ЭДС Холла по сравнению с полупроводниками намного меньше, и поэтому использование эффекта Холла началось только с применением полупроводников.
Датчик
Холла — это датчик магнитного поля. Он
был так назван из-за принципа своей
работы —эффекта
Холла:
если в магнитное поле поместить пластину
с протекающим через неё током, то
электроны в пластине будут отклоняться
в направлении, перпендикулярном
направлению тока. В какую именно сторону
будут отклоняться электроны, зависит
от полярности магнитного поля. Его
размер — всего 4x3
мм, и он имеет три вывода:
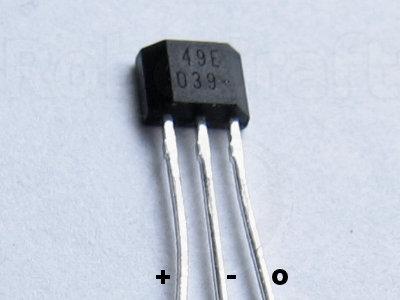 Как
видно, питание датчику нужно биполярное
— тогда на южный полюс магнита датчик
будет реагировать положительным уровнем
на выходе, на северный — отрицательным,
а на отсутствие поля — нулевым.
Как
видно, питание датчику нужно биполярное
— тогда на южный полюс магнита датчик
будет реагировать положительным уровнем
на выходе, на северный — отрицательным,
а на отсутствие поля — нулевым.
Список литературы:
-
Виктор Денисенко ПИД-регуляторы: принципы построения и модификации
-
http://www.lenze.org.ua
-
Системы автоматизированного управления электроприводами: Учебное пособие/ Г.И Гульков, Ю.Н. Петренко, Е.П Раткевич, О.Л. Симоненкова; Под общ.ред. Ю.Н. Петренко.- Мн.: Новое знание, 2004.- 384 с.: ил. (70-71)
-
Составители: П.Г Кужир, В.В. Павлюченко, С.И. Петренко Изучение эффекта Холла в полупроводниках.
-
http://robocraft.ru/blog/electronics/594.html