

4.4. Закон збереження моменту імпульсу і його використання. Гіроскопи. Гіроскопічний ефект
Скористаємось основним рівнянням динаміки обертального руху (4.3.6)
![]() (4.4.1)
(4.4.1)
Якщо
система замкнута, то будь-які зовнішні
сили будуть відсутні. Це означає, що
![]() .
Тому для замкнутої системи виконується
рівність
.
Тому для замкнутої системи виконується
рівність
 .
(4.4.2)
.
(4.4.2)
Рівність (4.4.2) має місце лише в одному випадку: коли результуючий момент імпульсу дорівнює сталій величині, тобто
![]() .
(4.4.3)
.
(4.4.3)
В будь-якій замкнутій системі сумарний момент імпульсу всіх тіл цієї системи з часом не змінюється. Це і є формулювання закону збереження моменту імпульсу. Закон збереження моменту імпульсу має досить широке використання.
Оскільки
![]() ,
(4.4.4)
,
(4.4.4)
то зміна моменту інерції Іі приводить до відповідної зміни кутової швидкості. Приклади використання закону збереження моменту імпульсу мають місце в техніці (наприклад регулятор Уатта), в спорті (фігурне катання) тощо.
Масивні симетричні тіла, які обертаються з великою кутовою швидкістю, називаються гіроскопами.
Якщо до гіроскопа, який здійснює обертальний рух прикласти дві сили, які намагаються повернути його навколо осі, перпендикулярної до осі обертання, то гіроскоп повернеться відносно третьої осі, перпендикулярної до перших двох осей. Цю властивість гіроскопа називають гіроскопічним ефектом (рис.4.9).
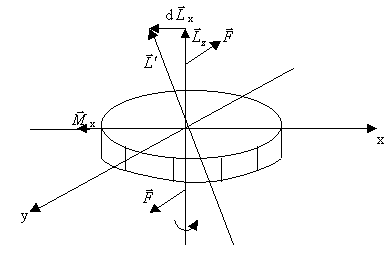
Рис.4.9
Дія
пари сил
![]() призводить
до повертання гіроскопа відносно осіх.
Напрям моменту сил
призводить
до повертання гіроскопа відносно осіх.
Напрям моменту сил
![]() x
збігається
з віссю х.
x
збігається
з віссю х.
У
відповідності з основним рівнянням
динаміки обертального руху виникає
додатковий момент імпульсу
![]() ,
тобто
,
тобто
![]() .
.
Вісь
обертання гіроскопа z
повернеться і займе нове положення
вздовж рівнодійної векторів
![]() і
і![]() .
Це рівноцінно тому, що гіроскоп
повертається відносно осі
y.
.
Це рівноцінно тому, що гіроскоп
повертається відносно осі
y.
Сучасні гіроскопи широко використовуються у техніці. Обертаю-чись з кутовою швидкістю у сотні тисяч обертів за хвилину, гіроскопи допомагають прокладати курс різноманітним плавзасобам, стабілізують польоти ракет тощо.
Лекція 5
Елементи спеціальної теорії відносності
5.1. Постулати спеціальної теорії відносності. Перетворення координат Лоренца.
5.2. Наслідки перетворення координат Лоренца. Закон складання швидкостей.
5.3. Зв’язок маси й енергії.
5.1. Постулати спеціальної теорії відносності
Перетворення координат Лоренца
В класичній механіці Ньютона для тіл, які рухаються з швидкостями, набагато меншими за швидкість світла (v<<с), виконується механічний принцип відносності Галілея.
Суть класичного принципу відносності полягає в тому, що закони динаміки однакові для всіх інерціальних систем відліку.
Розглянемо дві інерціальні системи координат відліку (рис.5.1).

Рис. 5.1.
Інерціальну
систему з координатами x,
y,
zбудемо вважати нерухомою. Система,
координати якої
![]() ,
,![]() ,
,![]() рухається відносно нерухомої системи
з сталою швидкістюu.
рухається відносно нерухомої системи
з сталою швидкістюu.
В довільний момент часу t
![]() =
x - ut,
=
x - ut,
![]() =y,
=y,
![]() =z,
=z,
![]() =
t. (5.1.1)
=
t. (5.1.1)
Ці перетворення координат називаються перетвореннями Галілея.
Диференціюємо ці перетворення за часом і знайдемо закон складання швидкостей у класичній механіці:
![]()
![]()
![]() . (5.1.2)
. (5.1.2)
де
![]() -
швидкість руху матеріальної точки в
напрямі осіxвідносно
штрихованої системи координат;
-
швидкість руху матеріальної точки в
напрямі осіxвідносно
штрихованої системи координат;![]() - швидкість руху матеріальної точки в
напрямі осіхвідносно нерухомої
системи координат;u– швидкість руху штрихованої системи
відносно не штрихованої системи.
- швидкість руху матеріальної точки в
напрямі осіхвідносно нерухомої
системи координат;u– швидкість руху штрихованої системи
відносно не штрихованої системи.
У векторній формі класичний закон складання швидкостей матиме вигляд:
![]() .
(5.1.3)
.
(5.1.3)
Диференціюємо за часом вираз (5.1.3), одержимо:
![]() ,
або
,
або![]() .
(5.1.4)
.
(5.1.4)
Прискорення матеріальної точки інваріантне відносно перетворень координат Галілея. Можна також стверджувати, що сили теж є інваріантними величинами відносно перетворень координат Галілея
![]() .
(5.1.5)
.
(5.1.5)
Висновок:У будь-яких інерційних системах відліку всі механічні явища за однакових умов є інваріантні (однакові).
Цей висновок носить назву механічного принципу відносності.
У 1905 році видатний фізик ХХ сторіччя Альберт Ейнштейн, аналізуючи великий експериментальний матеріал, сформулював два постулати створеної ним спеціальної теорії відносності, суть яких така:
у будь-яких інерційних системах відліку всі фізичні явища за однакових умов відбуваються однаково;
швидкість світла у вакуумі не залежить від швидкості руху джерела світла.
З першого постулату Ейнштейна виходить, що за допомогою будь-яких фізичних дослідів, поставлених у замкнутій системі, неможливо виявити рухається ця система чи перебуває у стані спокою.
Другий постулат Ейнштейна суперечить класичному закону додавання швидкостей.
З постулатами спеціальної теорії відносності перебувають у відповідності не перетворення координат Галілея, а дещо складніші перетворення, які називаються перетвореннями координат Лоренца.
Нехай штрихована система рухається відносно не штрихованої системи координат з сталою швидкістю , при чомуc. Нехай швидкістьнаправлена уздовж осі ОХ. Тоді релятивістські перетворення координат Лоренца будуть мати вигляд:

![]() =
=
![]() ;
;![]() =
=
![]() ;
;
 .
(5.1.6)
.
(5.1.6)
Координати штрихованої системи по відношенню до координат нештрихованої системи:
 ;
;
![]() =
=
![]() ;
;![]() =
=
![]() ;
; .
(5.1.7)
.
(5.1.7)
У випадку, коли v<<c, перетворення координат Лоренца переходять у класичні перетворення Галілея:
х=![]() +t,
+t,
![]()
![]() ,
,
![]() ,
,![]() ;
;
або
![]() =x
-
t,
=x
-
t,
![]()
![]() ,
,
![]() ,
,![]() .(5.1.8)
.(5.1.8)
Класична механіка придатна для розгляду таких рухів, швидкості яких, порівняно з швидкістю світла, досить малі.
Механіка, яка розглядає рух тіл з швидкостями, близькими до швидкості світла, називається релятивістською механікою.