

2.1 Приклад розв’язування задачі д1
Умова задачі. Візок разом з матеріальною точкою М рухається під дією сили ваги і тертя з коефіцієнтом f = 0,2 по похилій площині AD з кутом = 15о , рис. Д1.31. В той момент, коли точка М займе положення В на віддалі АВ = l = 2м і висоті h = 1 м над горизонтальною площиною AD, точку М виштовхують з візка з швидкістю U=8м/с в напрямку перпендикулярному до похилої площини. В цей момент візок з точкою М має швидкість VB , що направлена по похилій плошині. Від точки В до точки С точка М рухається по траєкторії y(x) час Т, в точці С має швидкість VC, вектор якої складає з вертикаллю кут . Точка С знаходиться на горизонтальній площині DC на віддалі DC = d = 5 м.
Визначити максимальну висоту H точки М над горизонтальною площиною DC , кут для швидкості VC, рівняння траєкторії y(x), по якій рухається точка М на ділянці ВС і початкову швидкість VA , з якою візок починає рух по похилій площині AD. Висотою точки М над поверхнею похилої площини AD знехту-
вати, опір повітря не враховувати.
Розв’язання. Проведемо аналіз сил, які діють на точку М в поцесі руху від точки А до точки С. На похилій площині на точку М ра-зом з візком діють результуюча сила ваги Q = ( M + m)g ( M – маса візка, m – маса точки), сила реакції похилої площини N і сила тертя FT. При русі в повітрі по траєкторії y(x) на точку діє лише сила ваги P = mg. Тому розглядаємо дві ділянки руху: АВ і ВС. Будуємо розрахункову схему сил, які прикладені до точки М з віз-ком під час руху на ділянці АВ і показуємо її на рис. Д1.32. Складаємо диференціальне рівння руху важкої матеріальної точки масою M + m
вздовж осі Ax
![]() ,
,![]() (1.1)
(1.1)
де
![]() ,
,
![]() .
.
Після підстановки суми сил в рівняння загального вигляду (1.1) і спрощення отримаємо
![]() =g
( sinf
cos
= 9,8
( 0,259 – 0,2 0,966 ) = 0,64 . (1.2)
Інтегруємо диференціальне рівняння
(1.2) два рази
=g
( sinf
cos
= 9,8
( 0,259 – 0,2 0,966 ) = 0,64 . (1.2)
Інтегруємо диференціальне рівняння
(1.2) два рази
Vx
=
![]() = 0,64 t
+ C1,
Vx
=
= 0,64 t
+ C1,
Vx
=
![]()
![]()
x
=![]() +
+![]() =
0,32 t2
+ C1t
+ C2
=
0,32 t2
+ C1t
+ C2
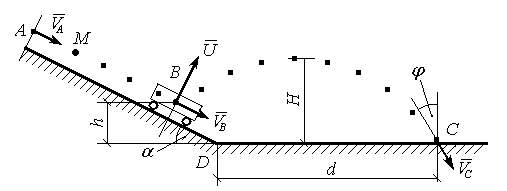
Рисунок Д1.31
Початковими умовами для цих інтегралів є:
x = 0 і Vx = VA при t = 0 ,
тому сталі інтегрування рівні: C1 = VA , C2 = 0 . Остаточними розв’язками диференціального рівняння (1.2) будуть функції: Vx = 0,64 t + VA , x = 0,32 t2 + VA t . (1.3)
Якщо в розв’язках (1.3) покласти, що x = l = 2, то Vx = VB , а t відповідає часу руху візка з точкою М від точки А до точки В. Підставимо ці значення в функції (1.3)
VB = 0,64 t + VA , 2 = 0,32 t2 + VA t (1.4)
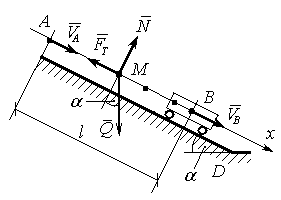
Рисунок Д1.32
Система рівнянь (1.4) не може бути розв’язана, тому що в ній три невідомих: VA , VB , і t .
Будуємо розрахункову схему для ділянки ВС і показуємо її на рис. Д1.33.
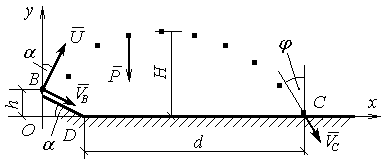
Рисунок Д1.33
Складаємо диференціальні рівняння руху точки М на площині xOy.
Загальний їх вигляд такий:
m![]() =
Xk
, m
=
Xk
, m![]() =
Yk
. (1.5)
=
Yk
. (1.5)
На точку М діє єдина сила Р, тому суми проекцій сил на осі рівні:
Xk = 0 , Yk = - mg.
Маса точки відмінна від нуля, тому диференціальні рівняння (1.5) мають вигляд:
![]() = 0
,
= 0
,
![]() =
-
g
. (1.6)
Знаходимо перші
та другі інтеграли диференціальних
рівнянь (1.6)
Vx
= C3
, x
= C3
t
+ C4
,
=
-
g
. (1.6)
Знаходимо перші
та другі інтеграли диференціальних
рівнянь (1.6)
Vx
= C3
, x
= C3
t
+ C4
,
(1.7)
Vy = - g t + C5 , y = - 0,5 g t2 + C5 t + C6 .
Початковими умовами для диференціальних рівнянь (1.6) будуть: Vx = VB cos + U sin
Vy = U cos VB sin
при t = 0, x = 0 і y = h .
Тому сталі інтегрування С3 – С6 мають значення:
C3 = VB cos + U sinC4 = U cos VB sinC5 = 0 , C6 = h.
Підставимо знайдені сталі інтегрування в інтеграли (1.7)
Vx = VB cos + U sin
Vy = U cos VB singt x = (VB cos + U sint ,
y = ( U cos VB sin tgt2 + h. Функції (1.8) є кінематичними рівняннями руху точки М на ділянці ВС. Якщо точка М знаходиться в точці С, то t = T, x = OD +d , y = 0, див. рис. Д1.33. OD = h ctg . Використаємо ці умови для координат із (1.8), то отримаємо
d + h ctg = (VB cos + U sin ,
( U cos VB sin tgt2 + h= 0 .
Підставимо задані умовою величини
(VB cos15o + 8 sin15oT5 + 0,5 ctg15o,
(1.9)
( 8 cos15o VB sin15oT0,5gT2 + 1 = 0.
В системі рівнянь (1.9) виключимо Т і одержимо квадратне рівняння відносно VB
VB2 – 51,6 VB + 183,73 = 0. (1.10) Звідки розв’язки: VB1 = 47,75, VB2 =3,85 . Підставимо знайдені VB1 і VB2 в перше рівняння із системи (1.9) і знайдемо час Т , за який точка М переміститься від точки В до точ- ки С. Після обчислень знаходимо: Т1 = 0,18, T2 = 1,51. Відоме VB дозволяє розв’язати систему рівнянь (1.4), звідки знайдемо VA. Підстановка значень VB1 і VB2 в систему рівнянь (1.4) дає од-нозначні результати VA1 = 47,72 і VA2 = 3,5. Знайдемо траєкторію точки М на ділянці ВС. Для цього в функ-ціях координат формул (1.8) підставляємо значення VB в двох варі-
антах VB1 і VB2 . При VB = VB1 = 47,75 отримуємо:
![]()
![]()
![]()
![]() .
.![]() Виключимо
в знайдених функціях параметрt
. Тоді траєкторія буде мати вигляд
Виключимо
в знайдених функціях параметрt
. Тоді траєкторія буде мати вигляд
![]() .
(1.11)
При
VB
= VB2
= 3,85
.
(1.11)
При
VB
= VB2
= 3,85
![]()
![]() .
Після
виключення t
одержуємо
траєкторію:
.
Після
виключення t
одержуємо
траєкторію:
![]() .
(1.12)
.
(1.12)
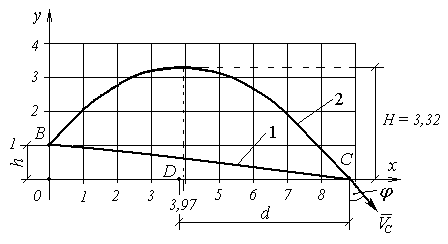
Рисунок Д1.34
Побудуємо траєкторії (1.11) і (1.12) в системі координат xOy і по-кажемо їх на рис. Д1.34 , де крива 1 відповідає траєкторії (1.11), а 2 - трає кторії (1.12). Обидві траєкторії є параболами. У кривої 1 екстремум знаходиться за межами ділянки траєкторії ВС, а у кривої 2 такий екстремум існує при x = 3,97. Тому серед розв’язків вадратного рівняння (1.10) вибираємо ті, що відповідають траєкторії (1.12). Таким чином : VB =3,85м/с, T = 1,51с , VA = 3,5 м/с. Визначимо кут , під яким направлена швидкість VC в точці С. Для цього визначимо складові VCx і VCy . Якщо в формули (1.8), що від-повідають швидкостям, підставити знайдені VB , T, то одержимо:
![]() ,
,
![]() .
.
Кут знайдемо із співвідношення tg |VCx / VCy | , де відношення швикостей беремо за модулем, тому що напрямок швидкості точки С
відносно системи координат xOy нам відомий з рис. 1.34. tg = 5,79 / 8,07 = 0,7174, то = 35o40`. Знайдемо максимальну висоту Н точки М при її русі по трає-кторії ВС. В найвищій точці траєкторії Vy = 0 . Це буде в момент
часу t = tm . Із формули (1.8) для Vy знаходимо:
![]() .
Тоді
з формули для y(t)
із
(1.8) при умові що y
= H
при
t
= tm
= =0,687 c,
знаходимо
:
.
Тоді
з формули для y(t)
із
(1.8) при умові що y
= H
при
t
= tm
= =0,687 c,
знаходимо
:
![]() .
.
Відповідь:
H
= 3,32 м,
=
35o40`,
![]() VA
= 3,5 м/с.
VA
= 3,5 м/с.
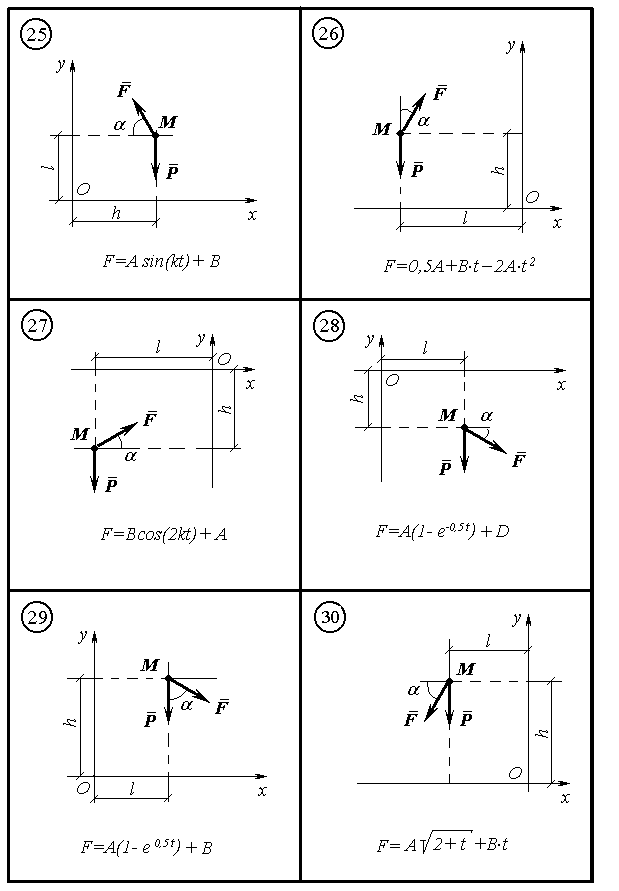
Д2. Рух матеріальної точки під дією сил залежних від часу
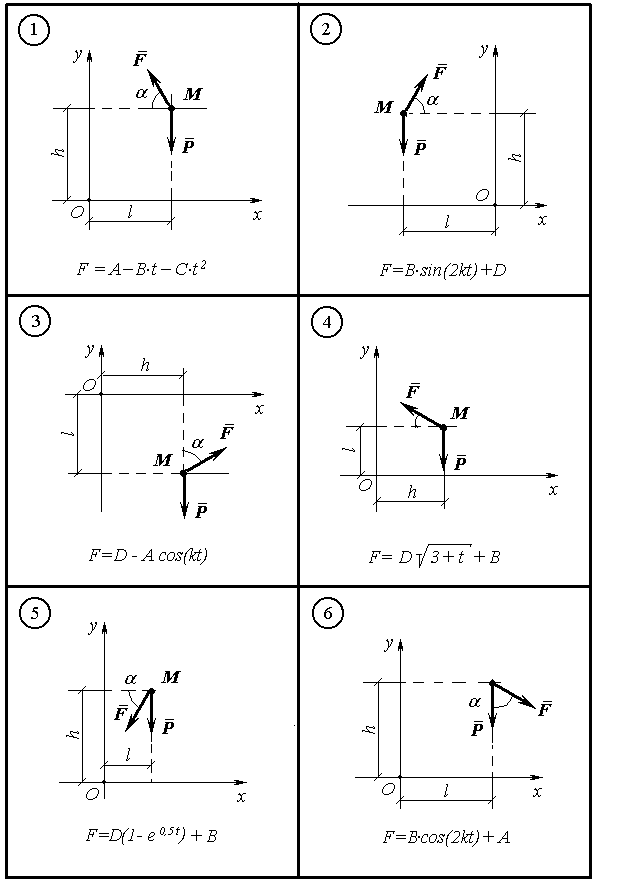
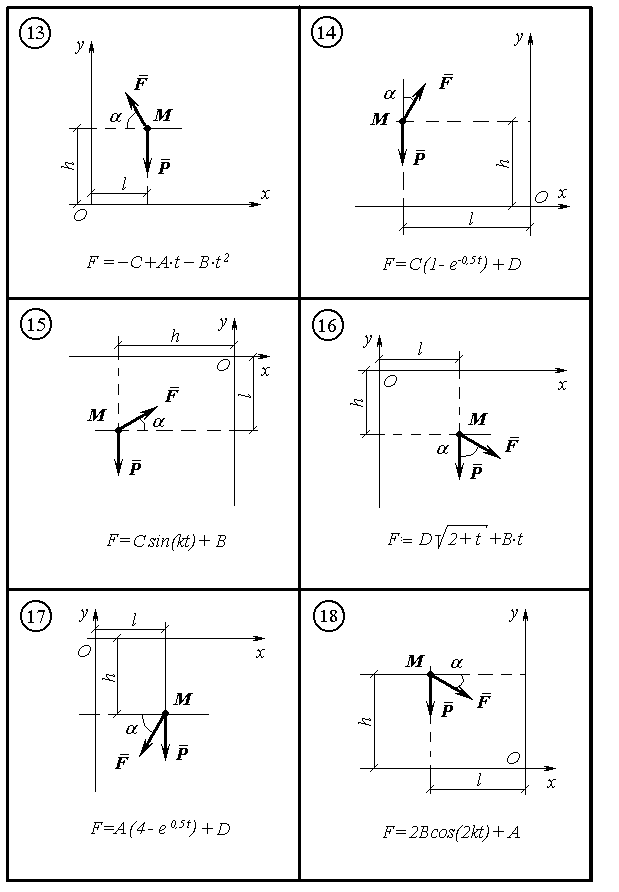
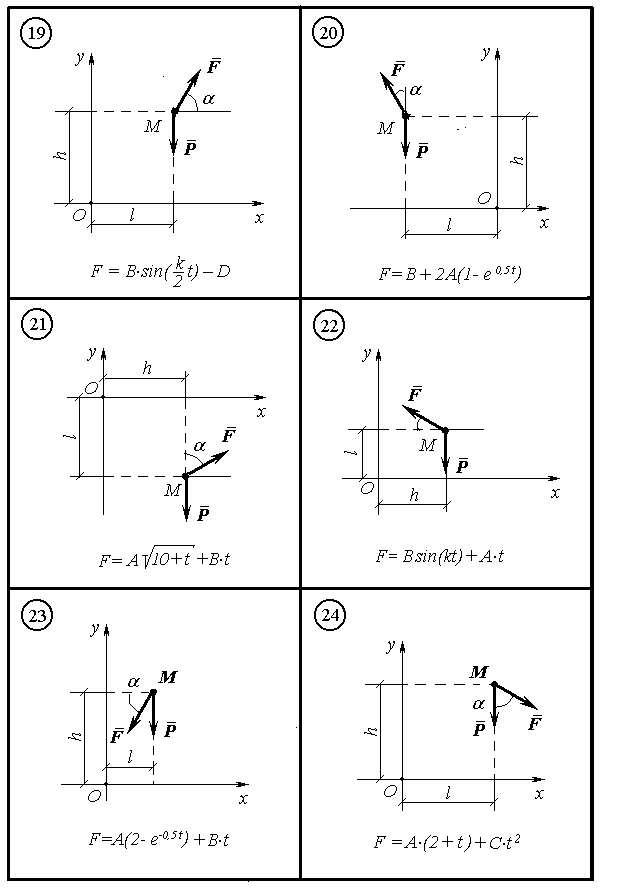
Матеріальна точка М масою m рухається у вертикальній площині xOy під дією сили ваги Р і сили F залежної від часу. Нап-рямок сили F визначено кутом . На рисунках Д2.1 – Д2.6 по вар-іантах від 1 до 30 зображено точку М з діючими силами, де вказано аналітичний вигляд залежності F(t), а також початкове положення точки М в системі координат параметрами h і l . Точка М починає рух зі швидкістю, яка визначається складовими по осях VOx і VOy .
Знайти кінематичні рівняння руху точки М: x(t) , y(t), V(t), a(t). Побудувати графіки залежностей V(t), a(t) і траєкторію y(x). Від-мітити положення точки М на траєкторії в момент часу t1, для цього момента побудувати вектори швидкостей і прискорень, зобразити ці вектори на рисунку траєкторії у вибраному масштабі.
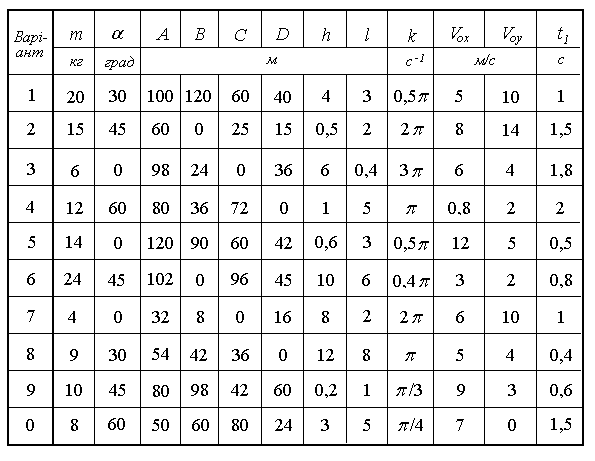
Значення коефіцієнтів A, B, C, D і k є сталими, вони разом з ін-шими даними наведені в таблиці Д2.1 по варіантах.
Таблиця Д2.1
 Рисунок
Д2.1
Рисунок
Д2.1

Рисунок Д2.2
 Рисунок
Д2.3
Рисунок
Д2.3
 Рисунок
Д2.4
Рисунок
Д2.4
 Рисунок
Д2.5
Рисунок
Д2.5