

§15. Поверхности второго порядка.
Поверхностью второго порядка называют совокупность точек пространства, координаты которых x,y,zудовлетворяют уравнению
![]()
Коэффициенты
![]() могут принимать любые действительные
значения и удовлетворяют условию
могут принимать любые действительные
значения и удовлетворяют условию![]() .
.
Для определения вида поверхности второго порядка необходимо ее уравнение привести к виду, не содержащему произведений координат. Этого можно достичь соответствующим выбором системы координат.
![]() называют квадратичной формой. Матрицу
называют квадратичной формой. Матрицу
 ,
,
где
![]() ,
называют матрицей квадратичной формы.
Вектор
,
называют матрицей квадратичной формы.
Вектор![]() ,
удовлетворяющий условию
,
удовлетворяющий условию![]() называют собственным вектором матрицы
А,
называют собственным вектором матрицы
А,![]() - собственным значением.
- собственным значением.
Каждая матрица квадратичной формы имеет три взаимно ортогональных собственных вектора. Если единичные векторы собственных векторов матрицы А принять за единичные векторы новой системы координат, то в выражении квадратичной формы коэффициенты при произведениях обратятся в ноль и форма примет вид:
![]() .
.
Присоединяя к ней линейную часть общего уравнения поверхности второго порядка и выделяя полные квадраты, получим каноническое уравнение поверхности второго порядка.
Пример 24.Привести к каноническому виду уравнение поверхности:
3x2+5y2+3z2– 2xy+ 2xz– 2yz-12x– 10 = 0.
Решение.
Составим матрицу А:
 .
.
Найдем собственные векторы:
![]()



Полученная система имеет ненулевые решения, если ее определитель равен нулю, т.е.

Раскрывая определитель, получим:
![]() .
.
Отсюда находим:
![]() .
.
При
![]() получим систему уравнений:
получим систему уравнений:

Решив систему, получим первый собственный
вектор
![]() .
Единичный вектор
.
Единичный вектор![]() собственного вектора
собственного вектора![]() будет:
будет:![]() .
.
При
![]() получим
получим
![]()
При
![]() получим
получим![]() .
.
Записывая координаты единичных векторов в соответствующие столбцы, получим матрицу преобразования S:

Отсюда получим формулы преобразования координат:
![]()

![]()
![]()
Подставим значения
![]() ,
,![]() и
и![]() в уравнение поверхности:
в уравнение поверхности:

или
![]()
Перепишем уравнение в виде:
![]()
Дополнив выражение в каждой скобке до полного квадрата, получим:
![]()
Совершив параллельный перенос осей координат и разделив на 24 обе части уравнения, получим
![]()
Это уравнение описывает поверхность, называемую эллипсоидом.
Классификация поверхностей второго порядка.
Применяя преобразование координат, уравнение поверхности второго порядка всегда можно привести к виду:
![]() .
.
В зависимости от величины и знаков
коэффициентов
![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() и
и![]() могут представиться следующие частные
случаи уравнений поверхностей второго
порядка.
могут представиться следующие частные
случаи уравнений поверхностей второго
порядка.
Таблица 1.
1. Эллипсоиды:
![]()
 трехосный эллипсоид,
трехосный эллипсоид,
![]() мнимый эллипсоид
мнимый эллипсоид
![]() точка
точка![]()
2 .
Гиперболоиды:
.
Гиперболоиды:
1)![]() однополостные
гиперболоиды
однополостные
гиперболоиды
![]()
![]()
2 )
)![]() двуполостные
гиперболоиды
двуполостные
гиперболоиды
![]()
![]()
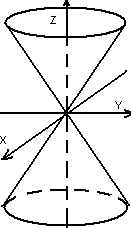
3. Конусы:
![]()
![]()
![]()
4. Параболоиды:
1 )
)![]() эллиптические параболоиды
эллиптические параболоиды
![]()
![]()
2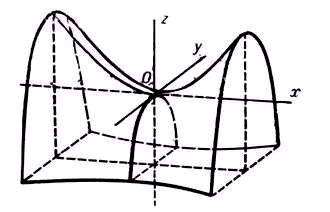 )
)![]() гиперболические параболоиды
гиперболические параболоиды
![]()
![]()

5. Цилиндры
1)![]() эллиптические цилиндры
эллиптические цилиндры
![]()
![]()
2 )
)![]() гиперболические цилиндры
гиперболические цилиндры
![]()
![]()
3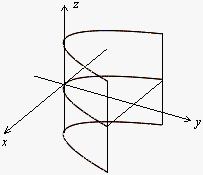 )
)![]() - параболические цилиндры
- параболические цилиндры
![]()
![]()
![]()
![]()
![]()
 6.
Пары плоскостей:
6.
Пары плоскостей:
1)![]() - пары пересекающихся плоскостей
- пары пересекающихся плоскостей
![]()
2 )
)![]() - пары параллельных плоскостей
- пары параллельных плоскостей

3 )
)![]() - пары совпадающих плоскостей
- пары совпадающих плоскостей
![]()
§16. Преобразование декартовых координат.
Известно, что положение точки М некоторого пространства Vможно однозначно определить, задав координатыx,yиzэтой точки относительно некоторой системы координатOXYZ. Выбор системы координат – произвольный. Очевидно, что в одной системе координатXOYZточка М будет иметь координаты М(x;y;z), а в другой системеX’O’Y’Z’ точка М будет иметь другие координаты М(x’;y’;z’). Естественно возникает задача: зная координаты точки М в одной системе координат, выразить через них координаты той же точки М относительно другой системы.
Задача сводится к нахождению трех функций:

позволяющих однозначно определить координаты точки М относительно одной системы координат, зная их относительно другой системы. Если системы XOYZиX’O’Y’Z’ - прямоугольные декартовы системы координат, то формулы перехода от одной системы координат к другой системе имеют вид:
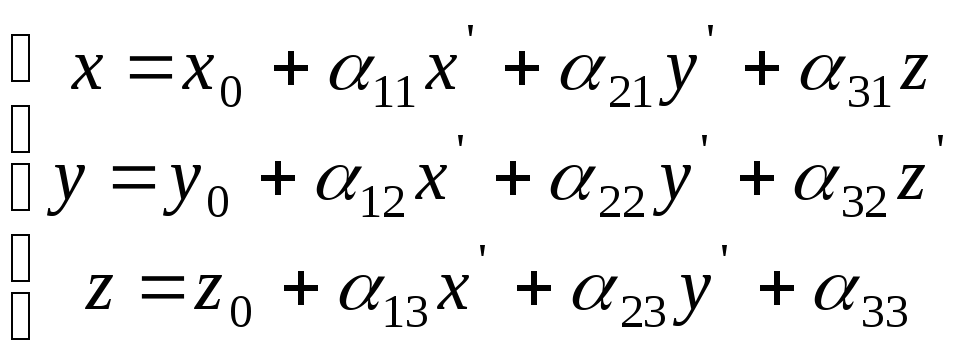
где точка
![]() - начало координат новой системыX’O’Y’Z’;
- начало координат новой системыX’O’Y’Z’;![]() - направляющие косинусы углов, составленных
единичными векторами новой и старой
систем координат. Если система координат
определена на плоскости, то формулы
преобразования имеют вид:
- направляющие косинусы углов, составленных
единичными векторами новой и старой
систем координат. Если система координат
определена на плоскости, то формулы
преобразования имеют вид:
 .
.
Если
![]() ,
то есть начало новой системы координат
совпадает с началом старой системы, то
формулы преобразования имеют вид:
,
то есть начало новой системы координат
совпадает с началом старой системы, то
формулы преобразования имеют вид:

и определяют поворот системы.
Если единичные векторы старой и новой систем коллинеарны, то получим преобразование параллельного переноса:

На плоскости преобразования поворота
и параллельного переноса имеют вид:


Общее преобразование можно рассматривать как суперпозицию параллельного переноса и поворота системы координат. Справедливо фундаментальное утверждение: каковы бы ни были две произвольные прямоугольные декартовы системы координат, координаты x,y,zлюбой точки пространства относительно одной системы являются линейными функциями координатx’,y’,z’ той же точки относительно другой системы.