

Вероятностный автомат Милли--Пусть элементы множества g порождает некоторые законы распределения на множествах z и y.
Элементы из Y y1 ,y2 ….., yj-1 ,yj
(xi,zs) q1 ,q2 ….., qj-1 ,qj
Элементы из Z z1 , z2 ….., zk-1 , zk
(xi,zs)
![]() 1
,
1
,
![]() 2
…..,
2
…..,
![]() k-1,
k-1,![]() k
k
![]()
![]() qj
и
qj
и![]() k,это
вероятности перехода автоматов в
состояние zk
и появления выходного сигнала yk
,
если автомат находиться в состоянии zs
и на его вход поступил входной сигнал
xi.
k,это
вероятности перехода автоматов в
состояние zk
и появления выходного сигнала yk
,
если автомат находиться в состоянии zs
и на его вход поступил входной сигнал
xi.
Если для всех k и j выполняется условие qkzi=bkj, то такой P- автомат называется вероятностным автоматом Милли. У такого автомата распределения независимы для нового состояния и его выходного сигнала.
Дискретно стохастические модели. (P- схемы):Вероятностный автомат Мура.
Дискретно стохастические модели. (p- схемы)
Сущность дискретизации времени при дискретно – стохастическом подходе остается аналогичной конечным автоматом. Влияние стохастичности рассмотрим на разновидности этих автоматов, а именно на вероятностных автоматах.
Вероятностный автомат – это дискретный преобразователь информации с памятью, функционирование которого, в каждом такте, зависит только от состояния памяти в нем и может быть описано стохастически.
Рассмотрим
множество G,
элементами которого являются (xj,zs)
, xj
![]() X,
zs
X,
zs
![]() Z
Z
X – множество входных значений, Z – Множество возможных состояний.
Если
существует две такие функции
![]() ,
f
с помощью которых выполняется отображение
G
,
f
с помощью которых выполняется отображение
G![]() Z,
G
Z,
G![]() Y,
то говорят что пятерка элементов,
входящая в кортеж F=(Z,X,Y,
Y,
то говорят что пятерка элементов,
входящая в кортеж F=(Z,X,Y,![]() ,f)
определяет автомат детерминированного
типа.
,f)
определяет автомат детерминированного
типа.
Здесь Y – множество выходных значений.
Введем
в рассмотрение более общую математическую
схему. Пусть Ф множество возможных пар
вида Ф(zk,yj);
yj![]() Y
Y
Потребуем, чтобы любой элемент множества G порождал на множестве Ф некоторый закон распределения вида:
Элементы из Ф …(z1 ,y1)… (z1 ,y2) …(zk ,yj-1) (zk ,yJ)
(xi,zs) ….b11… b12…bk(j-1) bkJ
![]() ;
bkj
– это вероятность перехода автомата в
состояние zk
и выдачи выходного сигнала yj
,
если автомат находиться в состоянии zs
и на его вход поступил входной сигнал
xi
;
bkj
– это вероятность перехода автомата в
состояние zk
и выдачи выходного сигнала yj
,
если автомат находиться в состоянии zs
и на его вход поступил входной сигнал
xi
Число таких распределений равно числу элементов множества G и составляют множество B . Тогда кортеж P=<Z,X,Y,B> называется вероятностным автоматом.
Вероятностный автомат Мура---Пусть определение выходного сигнала p–автомата завит лишь от того состояния, в котором находится автомат в данном такте работы.
Элементы из Y y1 ,y2 ….., yi-1 ,yi
zk s1 ,s2 ......., si-1 ,si
![]()
si – вероятность выдачи выходного сигнала yi при условии ,что автомат находится zk
Если для всех k и i выполняется условие zksi=bki, то такой P- автомат называется вероятностным автоматом Мура.
Y и Z детерминированные автоматы-- Частным случаем Р-автомата, задаваемого как P=<Z,X,Y,B> являются автоматы, у которых либо переход в новое состояние, либо выходной сигнал определяются детерминировано. Если выходной сигнал Р-автомата определяется детерминировано, то такой автомат называется Y-детерминированным вероятностным автоматом. Аналогично, Z- детерминированным вероятностным автоматом называется Р-автомат, у которого выбор нового состояния является детерминированным.
Непрерывно-стохастические модели (Q-схемы).
Непрерывно-стохастические модели (q-схемы) Основные понятия и определения
Система массового обслуживания представляет собой класс математических схем, разработанных в теории массового обслуживания и приложений для формализации процессов функционирования систем, которые, по своей сути, являются процессами обслуживания. Характерным для таких объектов является случайное появление требований (заявок) на обслуживание и завершение обслуживания в случайные моменты времени.
В любом элементарном акте обслуживания можно выделить две составляющие:
1. ожидание обслуживания
2. обслуживание заявки
Процесс обслуживания можно представить в виде прибора обслуживания Пi.
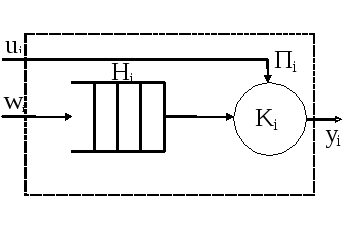
Нi – накопитель
ui- поток обслужмвания
wi- поток заявок
Ki – канал обслуживания заявки.
![]() количество
заявок, которое одновременно может
находиться в накопителе. L
– емкость i-го
накопителя и канала обслуживания заявок
Ki.
количество
заявок, которое одновременно может
находиться в накопителе. L
– емкость i-го
накопителя и канала обслуживания заявок
Ki.
При моделировании реальных систем используют композиции из отдельных элементарных систем, которые называют Q-схемами. Если каналы отдельных приборов соединены параллельно, то имеет место многоканальное обслуживание, т.е. многоканальная Q-схема. Если приборы и их параллельные композиции соединены последовательно, то имеет место многофазное обслуживание, т.е. многофазная Q-схема.
Для задания Q-схемы необходимо определить оператор сопряжения он отражает взаимосвязь элементов структуры, т.е. каналов и накопителей между собой.
Различают разомкнутые и замкнутые Q-схемы. В разомкнутых Q-схемах обратные связи отсутствуют. В замкнутых Q-схемах есть обратные Q-связи, по которым заявки двигаются в направлении, обратном направлению «вход-выход».
Сети Петри - N схемы.Сети Петри. N схемы
В практике моделирования объектов часто приходится решать
задачи, связанные с формализованным описанием и анализом причинно-следственных связей в сложных системах, где одновременно параллельно протекает несколько процессов.
Формальное описание структур таких систем, взаимодействие параллельных систем и процессов может быть получено с помощью сетей Петри ( К. Петри).
Сеть Петри представляет собой двухдольный направленный граф. Такой граф состоит из следующих элементов:
позиций
переходов.
Позиции и переходы соединяются между собой направленными дугами. В графе Петри не существует прямых соединений между двумя позициями или двумя переходами.
Позиции обозначаются окружностями, переходы показываются в виде прямоугольников. Позиция обладает определенной мощностью и в соответствии с мощностью может содержать несколько знаков (маркеров). Если значение мощности не задано, то оно принимается равной бесконечности или единице. Каждой дуге графа может быть поставлен в соответствие определенный «вес». Если это значение не указано, то принимается значение равное единице.
Загрузка позиций маркерами, называется маркировкой и представляет собой состояние сети.
Переход считается активным или готовым к активации если во всех входных позициях находится такое число маркеров, которое соответствует весу перехода и все выходные позиции обладают достаточной мощностью – емкостью для того чтобы принять новые маркеры.
Переходы готовые к активизации могут, активированы в произвольный момент времени. При включении перехода из входных его входных позиций выбираются маркеры в соответствии с весом дуги и помещаются в выходные позиции в соответствии с весами дуг.
Пример работы сети Петри
Дано сеть. В каждой позиции может находится два маркера.
Схема переходов показана в таблице.
|
Разметка |
Активный переход |
|
M0={0,0} |
- |
|
M1={1,0} |
d1 |
|
M2={2,0} |
d1 |
|
M3={1,1} |
d2 |
|
M4={0,2} |
d2 |
|
M5={0,1} |
d3 |
|
M6={0,0} |
d3 |
 Рис..
Маркировки M0 и M1.
Рис..
Маркировки M0 и M1.
 Рис..
Маркировки M2
и M3
Рис..
Маркировки M2
и M3
 Рис.
Маркировки M4
и M5.
Рис.
Маркировки M4
и M5.
После срабатывания перехода d3 на второй схеме маркировка становится равно M6=M0.
Обобщенные модели (А - схемы).