

ATS_-_kafedra_avtomobili_2008
.pdfдля всех передач, и дополнительно найти значения: Vmax для заданных дорожных условий; максимальное ускорение автомобиля jmax; максимальный преодолеваемый подъем imax - с помощью графических зависимостей. Значения δВР; Ме=f(n); Nе=f(n); rД принимаются из предыдущих занятий; rК rД.
При расчете принимается:
i = 0; РП = 0;
ηТ - принять равным: 0,9 для грузовых автомобилей и автобусов, 0,95 для легковых автомобилей;
Кр - принять равным 0,95; f=0.01;
kВ принимается равным для: гоночных автомобилей - 0.15…0.2; легковых автомобилей - 0.2…0.35; грузовых автомобилей - 0.5…0.7;
автобусов - 0.35…0.45;
автоцистерн - 0.55…0.65; автопоездов - 0.85…0.95.
4.2.2. Порядок расчета а) Силовой баланс
По вышеперечисленным формулам рассчитываются силы, входящие в уравнение (4.1):
-считается сила РТi на каждой передаче при различных значениях n - от nmin до nmax, включая характерные точки nМ , nN (см. занятие № 1);
-на каждой передаче определяется V для каждого значения
РТi. |
0,105ni r Д |
|
|
Скорость определяют по формуле: V |
, [м/с], |
||
UTi |
где ni - обороты ДВС [об/мин];
-рассчитываются силы сопротивления, входящие в уравнение
(4.1) (РК, РВ). Для расчета силы РВ берутся значения скорости: первое значение на первой передаче, остальные на высшей
передаче; РК = 0,01Ga; РИ - не рассчитывается, так как получается после откладывания всех остальных сил на график;
-наносятся силы на график.
б) Мощностной баланс Порядок расчета такой же, как и для силового баланса. На
графике (рис. 4.3) изображают как NT (NT Ne T KP ), так и Ne в зависимости от V на каждой передаче, а также все составляющие
22

правой части уравнения (4.2).
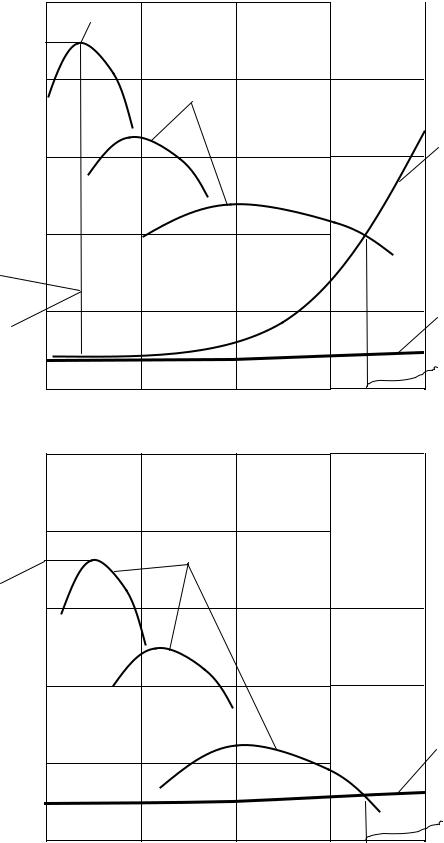
в) Динамический фактор рассчитывается по формуле 4.3 на каждой передаче. Значения PТ берутся из предыдущих расчетов,
значения РВ из формулы: PB kB F V 2 (для каждой передачи). График динамического фактора показан на рис. 4.2.
г) Определяются предельные параметры (Vmax, jmax, max);
Vmax - находится на пересечении кривых PТ и (РВ + РК) (рис. 4.1); jmax - находится из уравнения РИ для значения РИmax на первой
передаче при уклоне дороги = 0 PИ1max PT1max PK (рис. 4.1); αmax - на первой передаче в случае, когда вся сила тяги
расходуется не на разгон, а на преодоление сопротивления дороги
PПmax PT1max PK .
В результате расчетов заполняется таблица: 
Показа- |
Передача |
n, об/мин |
|
тели |
|
nmin |
nmax |
V, м/с |
1 |
|
|
|
2 |
|
|
|
… |
|
|
|
высшая |
|
|
РТ, кН |
1 |
|
|
|
2 |
|
|
|
… |
|
|
|
высшая |
|
|
D1
2
…
высшая
Ne, кВт
NТ, кВт f
РК, кН РВ, кН NК, кВт NВ, кВт
23
Р, кН РT1max
 РТi
РТi
РВ+ РК
РИ1max |
|
|
или |
РК |
|
РПmax |
||
|
||
|
Vmax |
|
0 |
V, м/с |
Рис. 4.1. График силового баланса
D
Di
D1max
ψ
Vmax
0 V , м/с
Рис. 4.2. Динамическая характеристика автомобиля
24

N, кВт |
Ne |
NВ+ NК |
|
NT
NК
Vmax
0 |
V, м/с |
Рис. 4.3. График мощностного баланса
5. РАСЧЕТ ПОКАЗАТЕЛЕЙ ПРИЕМИСТОСТИ
Цель практического занятия № 5 - овладение студентами графоаналитическим методом решения задач по оценке показателей приемистости автомобиля и расчет параметров динамического преодоления дорожных сопротивлений.
5.1. Общие сведения
С помощью полученной на предшествующем занятии динамической характеристики для того же автомобиля и по тем же исходным данным рекомендуется построить зависимость ускорения автомобиля на каждой передаче от скорости движения в заданных дорожных условиях и затем построить разгонную характеристику. Так же рекомендуется определить длину Sψ динамически преодолеваемого подъема на высшей передаче и построить график зависимости S f V .
5.1.1. Метод расчета показателей приемистости
Под приемистостью автомобиля понимают его способность быстро увеличивать скорость движения.
25
Оценочные показатели - текущее ускорение, максимальное ускорение, среднее ускорение на каждой передаче, а также время и путь разгона.
Ускорение на каждой передаче рассчитывают по формуле:
|
|
|
g |
|
|
ji |
Di |
|
|
. |
(5.1) |
|
BPi |
|
|||
|
|
|
|
|
|
Имея динамическую характеристику автомобиля, можно |
|||||
построить зависимость ji f |
V . |
Однако сравнивать различные |
|||
автомобили по этой зависимости затруднительно, так как у них могут отличаться не только значения jmax на каждой передаче, но и число ступеней трансмиссии.
Более информативными показателями приемистости являются время и путь разгона автомобиля в заданном интервале скоростей.
Для того чтобы определить время и путь разгона в интервале скоростей от Vmin до Vmax, разбивают этот интервал на мелкие
участки, для каждого из которых считают j = jCP = 0,5 (j1+ j2), где
j1 и j2 - ускорение в начале и в конце участка (см. рис. 5.1). Для каждого участка можно записать V 2 V1 jCP t ,
где V1 и V2 - скорости в начале и конце участка; t - время
изменения скорости от V1 до V2. Тогда t |
|
V 2 V1 |
. |
(5.2) |
|
||||
|
|
jCP |
|
|
Полное значение времени разгона в заданном интервале скоростей есть сумма времени разгона на отдельных участках
t t .
Путь за время движения |
t |
|
|
S VCP t , |
|
(5.3) |
|
где VСР - средняя скорость на участке VCP 0,5 |
V1 V 2 . Полный |
||
путь разгона есть сумма пути |
разгона на отдельных |
участках |
|
S S . |
|
|
|
5.1.2. Динамическое преодоление дорожных сопротивлений
Динамическим называют преодоление дорожного сопротивления с использованием кинетической энергии, запасенной на участке дороги, предшествующем тому, который не может быть преодолен с постоянной скоростью.
Из уравнения (5.1) следует, что при ψ > Dmax на
26
соответствующей передаче автомобиль будет замедляться до Vmin на этой передаче, после чего двигатель заглохнет.
За время падения скорости автомобиль пройдет путь, который определяется не только энергией, подводимой от двигателя, но и кинетической энергией автомобиля.
На занятии рекомендуется рассчитать длину динамически преодолеваемого подъема с заданным уклоном на высшей передаче так, чтобы суммарный коэффициент дорожного сопротивления был больше максимального значения динамического фактора на этой передаче.
5.2. Методические указания
5.2.1. Исходные данные
Для расчета целесообразно принимать исходные данные конкретного автомобиля, для которого проведен расчет зависимости D f V на предшествующем занятии. Время
переключения с низшей передачи на высшую (tП) - 1,0 с. Для расчета разгона принять уклон равным i=0, ψ=0,01, для расчета динамически преодолеваемого подъема принять:
ψ=1,2(Dmax на высшей передаче).
5.2.2. Порядок расчета
1. Построение графика разгонной характеристики
1.1. Расчет ускорений на каждой передаче
Кривые динамической характеристики из предыдущего занятия разбиваются на участки (не менее 8 на каждой передаче - таблица значений ni из предыдущего занятия), по формуле (5.1) находятся значения j и заносятся в табл. 5.1. Строится график зависимости
ji f V (рис. 5.1). (δВР берутся из занятия № 3 для ma)
1.2. Расчет времени и пути разгона на каждой передаче
а) Находятся значения jCP и рассчитываются интервалы времени по формуле (5.2) на i передаче.
б) Находятся значения VСР и рассчитываются интервалы пути по формуле (5.3) на i передаче.
в) Рассчитываются параметры переключения с текущей передачи на более высокую.
Замедление (jП) - по формуле (5.1), падение скорости VП=jП tП и путь, пройденный автомобилем при переключении (SП), учитывая,
27
что |
D |
PT PВ |
PT 0 |
D |
PВ |
. |
|
|
|||||
|
|
Ga |
|
Ga |
||
Разгон происходит:
на первой передаче - с Vmin1 до Vmax1 ;
на последующих (i) передачах - с (Vmax i-1 - VП) до (Vmaxi); на последней передаче - до 0,9Vmax.
г) Найденные значения заносятся в табл. 5.1 и по ним строится график разгонной характеристики (рис. 5.2).
2. Динамическое преодоление подъема
Для расчета используют кривую динамической характеристики на высшей передаче из занятия № 4, а уклон дороги - ψ = 1,2Dmax, где DВmax - максимальное значение на высшей передаче. Разбив кривую динамической характеристики на участки (не менее 8) в интервале скоростей от Vmax до Vmin, по формуле (5.1) можно определить j в начале и конце каждого участка. Затем определяют среднее значение замедления на каждом участке. Время прохождения участка определяют по формуле (5.2), а путь по формуле (5.3), при этом общий путь S = ΣΔS. Найденные значения заносятся в табл. 5.2.
Результаты расчета приведены в табл. 5.1 и 5.2.
28
Таблица 5.1 Результаты расчета графика ускорений и разгонной характеристики
Показа- |
Пере- |
|
|
|
|
|
|
|
n, об/мин |
|
|
|
|
|
|
||||
тели |
дача |
nmin |
|
|
|
|
|
|
|
|
|
|
… |
|
|
nmax |
|||
V, м/с |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
высш. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j, м/c2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
высш. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пере- |
1-2 |
jП = |
…, VП =…, tП =1 с, S=… |
|
|
|
|
|
|
||||||||||
ключе- |
2-3 |
jП = …, VП =…, tП =1 с, S=… |
|
|
|
|
|
|
|||||||||||
ние |
… |
jП = …, VП =…, tП =1 с, S=… |
|
|
|
|
|
|
|||||||||||
пере- |
n-1 - в. |
jП = …, VП =…, tП =1 с, S=… |
|
|
|
|
|
|
|||||||||||
дач |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
jСР, м/c |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
высшая |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VСР, |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м/с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
высшая |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t, с |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
высшая |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S, м |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
высшая |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Результаты расчета динамически преодолеваемого подъема
Показа- |
|
Значения V из таблицы 5.1 |
|
|
||||
тели |
Vmax, м/с |
Vi, м/с |
… |
… |
… |
… |
Vmin, м/с |
|
j, м/c |
|
|
|
|
|
|
|
|
jСР, м/c |
|
|
|
|
|
|
|
|
VСР, м/с |
|
|
|
|
|
|
|
|
t, с |
|
|
|
|
|
|
|
|
S, м |
|
|
|
|
|
|
|
|
S, м
29

j, м/c2
j1 |
j |
jСР
j2
0 V1 V2 Vi |
V, м/с |
Рис. 5.1. График ускорений
V, м/с
S
t 
0 t, c S, м
Рис.5.2. Разгонная характеристика
30

6. ТОРМОЗНЫЕ СВОЙСТВА
Цель практического занятия № 6 - закрепление студентами знаний, полученных на лекции по теме "Тормозные свойства".
Занятие предусматривает:
-рассмотрение процесса торможения с учетом перераспределения нормальных нагрузок и, как следствие, необходимости определенного распределения тормозных сил и возможности обеспечения их оптимального распределения;
-построение тормозной диаграммы, расчет тормозного пути.
6.1. Распределение тормозных сил при торможении
RZ1 |
ma jз |
|
RZ2 |
|
|
|
|
|
Ga |
hg |
|
RХ1=PТОР1 |
a |
b |
RХ2=PТОР2 |
|
|
L |
|
Рис. 6.1 Расчетная схема На рис. 6.1 представлена расчетная схема торможения
двухосного автомобиля.
При торможении на горизонтальной дороге на автомобиль действуют следующие силы: сила тяжести Gа; нормальные реакции передней RZ1 и задней RZ2 осей; суммарные продольные реакции в контактах колес с дорогой на передней оси RX1, задней оси RX2, которые равны тормозным силам РТОР1 и РТОР2; сила инерции, равная произведению массы автомобиля на замедление.
Тормозные силы при экстренном торможении:
PTOP1 X RZ1; |
PTOP2 X RZ2 . |
Чтобы найти RZ1 и RZ2, нужно рассмотреть уравнения равновесия моментов от действующих сил относительно точки 2
RZ1L ma jЗ hg Ga b 0 , |
(6.1) |
где а и b - координаты центра масс автомобиля относительно передней и задней оси;
hg - высота центра масс над поверхностью дороги. Координаты центра масс автомобиля (a, b) можно определить,
рассмотрев уравнения равновесия моментов от действия сил на неподвижный автомобиль относительно точки 2. На неподвижный автомобиль действуют только Ga, RZ1 и RZ2. Тогда:
RZ1L Ga b 0 , откуда b RZ1L Ga ; |
a L b . |
31