

1.Технологии информационно-управляющих систем кбо (комплексом бортового оборудования) атс.
Усложнение бортовой электронной сети современного автомобиля, увеличение количества исполнительных и управляющих устройств, всевозможных датчиков, контроллеров и, как следствие, объемов информационного обмена между ними привело к необходимости создания новой высокотехнологичной коммуникационной сети. Ею стала CAN-шина, обмен данными по ней осуществляется практически на всех новых машинах
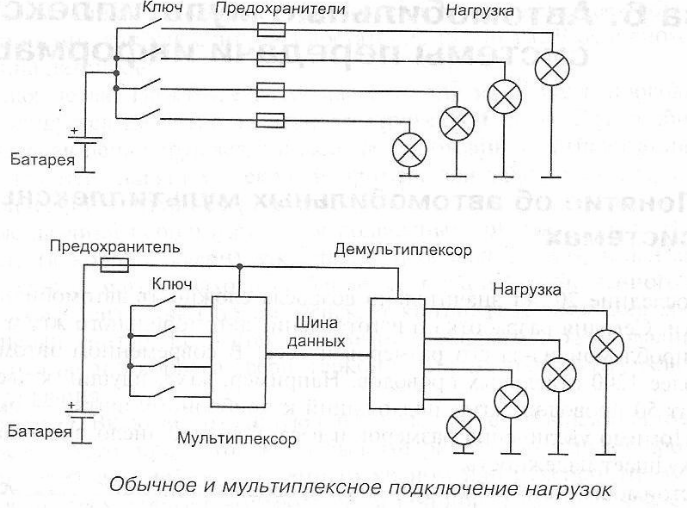
Мультиплексная проводка – это проводка с цифровой шиной данных, где используется цифровая связь между узлами и блоками управления. Сеть связи соединяет между собой множество модулей управления. Ее еще называют шинной системой связи. По сети связи модули управления имеют возможность обмениваться друг с другом информацией в цифровой форме. Для этого необходимо, чтобы все модули строили общение по одним правилам, то есть "говорили" на одном языке. Такой язык называется протоколом и заложен в программное обеспечение абонентов, то есть подключенных к шине модулей. В случае мультиплексной проводки необходимо лишь два провода: силовой и управляющий. Первый, достаточно толстый, должен иметь необходимое сечение, чтобы его пропускной способности хватило на питание сразу всех потребителей, второй - тонкий и служит для передачи сигнала от одного контроллера к другому.
Мультиплексные системы значительно отличаются от обычных:
1 В обычных системах электропроводки информация и питание передаются по одним и тем же проводам. В мультиплексных системах сигналы и электропитание разделены.
2 В мультиплексных системах управляющие ключи непосредственно не включают и не выключают электропитание нагрузок.
3 В некоторых случаях электронная схема узла должна постоянно считывать состояние управляющего ключа, даже когда большая часть электрооборудования обесточена. Например, положение ключа центрального замка дверей должно определяться и при парковке, когда многие системы выключены из соображений энергосбережения.
CAN-шина построена на технологии «витая пара — Twisted Pair» (два провода – Can-High и Can-Low). А как известно, помехозащищенность витой пары в разы больше одиночного провода. По этим проводам производится обмен данными между блоками управления. Они могут нести любую информацию, определенную автопроизводителем, причем скорость передачи этой информации может достигать 1 Мбит/с при высочайшей степени надежности прохождения сигнала.
В статическом состоянии дифференциальные сигнальные линии находятся под потенциалом, приблизительно равным 2,5 V (максимальное напряжение по шине CAN — 5 V). Такое состояние называется рецессивным и соответствует «1». В доминантном состоянии, когда линии Can-Low и Can-High расходятся, мы получаем «0». Это позволяет контроллеру, считывающему сигнал, всегда знать, где единичка, а где нолик (доминантный бит «0» подавляет рецессивный бит «1»).
Подключение модулей электронной системы автомобиля к шине происходит посредством специального устройства — трансивера, основной элемент которого представляет собой дифференциальный усилитель. По сути, это приемопередатчик сигналов, установленный на входе. После обработки поступивших с линий Can-High и Can-Low сигналов он передает их непосредственно электронному модулю автомобиля. Дифференциальный усилитель формирует выходное напряжение как разность между напряжениями на проводах High и Low шины CAN. Таким образом, исключается влияние величины базового напряжения (напряжения в рецессивном состоянии) или какого-либо иного напряжения, вызванного, например, внешними помехами. Также на конечных узлах шины предусмотрены «терминаторы» — сопротивления порядка 75 Ом, для того чтобы гасить сигнал, потому что на такой скорости передачи отражение сигнала от конца провода очень сильно влияет на стабильность сигнала.
На сегодняшний день мы можем говорить о трех классах, или разновидностях, шины, определяемых выполняемыми функциями.
CAN Class C — это шина силового агрегата и систем активной безопастности. Это самый быстрый канал со скоростью передачи данных 500 кбит/с, служащий для связи между главными блоками управления (двигатель — трансмиссия — ABS — системы безопасности). Именно здесь нам важна скорость реагирования, способность мгновенно обрабатывать колоссальные объемы информации.
CAN Class В служит для связи менее значимых модулей и блоков, входящих в состав систем климат-контроля или, например, кузовной электроники. В данном случае скорость .передачи уже не играет такой роли, да и объемы передаваемых данных не столь значительны, поэтому по CAN Class В информация передается со скоростью до 100 кбит/с.
Ну а к CAN Class А относятся совсем малозначительные блоки, поскольку скорость передачи составляет «всего» до 10 кбит/с.
Появление CAN значительно упростило работу мастеров. Если автомобиль подразумевает диагностику по CAN-шине, то обслужить его куда легче. Почему? Да потому, что раньше для каждого блока электронной системы требовался отдельный контакт, а теперь все модули объединены единой шиной, и стоит только подключиться к разъему, как вы сразу же видите всю картину. О возможности диагностики по CAN говорит присутствие «ножек» в разъеме на соответствующих позициях. На выходе только два контакта — Can-high и Can-Low, коммутация с которыми обеспечивает получение информации о каждом из имеющихся блоков. Тестер становится равнозначным участником обмена данными по шине и потому получает объективные сведения о состоянии каждого конкретного устройства