

2. Системы защиты для эм.
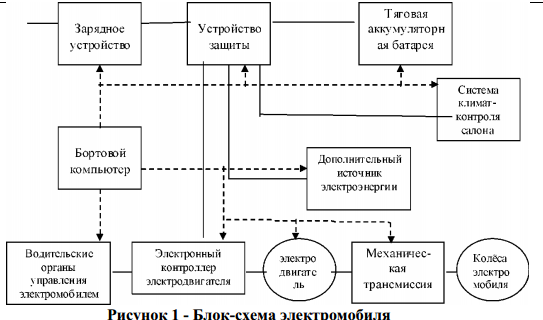
Устройство защиты (блок реле и предохранителей). Состоит из выключателей, реле, предохранителей, которые включены между аккумуляторной батареей и остальной электрической схемой — потребителями.
Аккумуляторы, электрические цепи и бортовые потребители электромобиля должны быть защищены. Замыкание в электропроводке электромобиля ведет к разряду аккумуляторной батареи. Во время неисправности энергия аккумуляторной батареи преобразуется в тепло, провода под большим током могут расплавиться. Замыкание в цени постоянного тока может привести к возникновению электрической дуги и, как следствие, — к пожару. Генерация тепла и дуговой разряд опасны для жизни человека. В большинстве электромобилей напряжение тяговой аккумуляторной батареи около 300 В. При таком уровне напряжения возможны электротравмы, от которых водитель и пассажиры должны быть защищены даже в сухую погоду.
В электромобилях металлические части корпуса не используются в качестве проводника (массы), вся электропроводка изолирована от корпуса, колесные покрышки (шины) изолируют корпус от дороги. Нарушение изоляции между электрической цепью и корпусом в одной точке не приводит к появлению значительных токов, способных разрядить аккумуляторы. Пробой во второй точке может стать причиной замыкания аккумуляторной батареи и опасен для пользователя. Вероятный сценарий появления коротких замыканий: проводящие отложения из аккумуляторов создают первый контакт с корпусом или иными металлическими частями; трение проводов о корпус может повредить их изоляцию и будет создан второй контакт, ведущий к короткому замыканию
Очень важно обнаружить первое нарушение изоляции. Для этого используют чувствительные системы измерения токов утечки (менее 0,01 мА), аналогичные тем, что устанавливаются в современных ванных комнатах и душевых. Второе нарушение изоляции ведет к короткому замыканию, цепь которого должна быть разорвана за несколько миллисекунд для предотвращения разряда аккумулятора. Для этого применяют электромагнитные и электронные быстродействующие контакторы, предохранители.
При эксплуатации электромобилей в тяжелых условиях (снег, грязь, длительный подъем) перегружаются и перегреваются аккумуляторы, тяговый электродвигатель, электропроводка. Перегревание сокращает срок службы этих систем. Электроприводные устройства имеют встроенную полупроводниковую систему защиты от перегрузок, но помимо этого для предотвращения выхода из строя дорогостоящего оборудования используются дополнительные защитные устройства в виде предохранителей и автоматов.
Помимо этого для безопасной эксплуатации электромобилей применяются различные аппаратные или программные блокировки. Например, когда терминал зарядного устройства вставлен в приемник электромобиля, заблокировано включение тягового двигателя. Во время заряда заблокировано включение системы управления климатом салона и т. д.
Билет 18
Электромеханические характеристики мотор-колес с асинхронными двигателями.
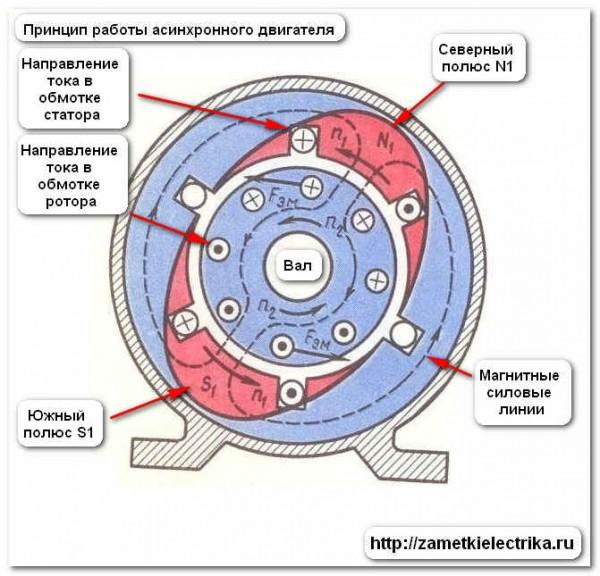
Асинхронный двигатель - это асинхронная машина, предназначенная для преобразования электрической энергии переменного тока в механическую энергию. Само слово “асинхронный” означает не одновременный. При этом имеется ввиду, что у асинхронных двигателей частота вращения магнитного поля статора всегда больше частоты вращения ротора. Работают асинхронные двигатели, как понятно из определения, от сети переменного тока.
Мотор колесо с асинхронным двигателем ( из моего курсача)
Мотор-колесо с асинхронным двигателем позволяет максимально упростить конструкцию мотор-колеса, поскольку асинхронные двигатели отличаются простотой конструкции, имеют удельные массу и объем (т. е. массу и объем, отнесенные к мощности или номинальному моменту) существенно меньшие, чем масса и объем электродвигателей постоянного тока, и не требуют обслуживания в эксплуатации. Однако статический преобразователь частоты со схемой управления тиристорами, регулирующий частоту вращения и момент асинхронного двигателя, пока является сложным, дорогостоящим и недостаточно надежным в эксплуатации. Силовые блоки получаются громоздкими, а это затрудняет их установку на автомобиле. Коэффициент мощности системы всегда меньше единицы, что повышает ток асинхронных двигателей.
Из книги Эйдинова:
Задачей экспериментальных исследований являлось получение электромеханических характеристик мотор-колеса, на основе которых оценивались тяговые качества автопоезда и основные режимы работы асинхронных двигателей. Для этой системы привода колес двухзвенного автопоезда характерны следующие особенности:
при питании асинхронных двигателей мотор-колёс от автономного синхронного генератора за счет действия продольной реакции якоря генератора его напряжение Uд при некоторых постоянных значениях частоты f1 и тока возбуждения iв.г. изменяется в зависимости от нагрузки и существенно влияет на форму механической характеристики электродвигателей, а также на тяговые характеристики автопоезда в целом;
пределы изменения частоты определяются рабочим диапазоном чисел оборотов теплового двигателя и передачей механического привода тягача (коробки передач), на которой включается система электропривода;
двойная кинематическая связь между тепловым и асинхронным двигателями обеспечивает возможность работы тяговых асинхронных двигателей электромотор-колес с рабочим скольжением spa6, несколько превышающим критическое sкp. Выбор величины рабочего скольжения spa6 > sкp позволяет обеспечить на автопоезде удовлетворительное распределение сил тяги как при движении на повороте, так и при буксовании одного из мотор-колёс полуприцепа.
коэффициента мощности при f1 = 70 Гц и iв.г = 60 А на 3%.
Тягово-динамическая характеристика колёс полуприцепа при смешанном приводе определяется оптимальным распределением крутящих моментов между колесами автопоезда в зависимости от условий его эксплуатации. Для этого на электромеханические характеристики Мк.ра6 = φ (iв г) (рис. 1.23) при f1 = const и соответствующих рабочих скольжениях (sраб = 0,22 для I передачи коробки передач тягача и sраб = 0,074 для III передачи) наносят найденные расчётные моменты Мк.р при φсц = 0,45.
Аналогично изменяются крутящий момент электромотор-колеса, ток, напряжение, коэффициент мощности асинхронного двигателя в пусковом режиме при sн = 1 (см. рис. 1.22,б) При пусковом режиме асинхронного двигателя крутящий момент мотор-колеса Мк п существенно меньше, чем в рабочем. Кратность рабочего и пускового моментов при f1 = 70 Гц и i в.г = 60 А составляет Мк.раб /Мк п = 2,23, а при iв г = 40 А − 2,55.
При снятии экспериментальных электромеханических характеристик мотор-колеса скорость вращения, момент сопротивления и, следовательно, величина относительного скольжения асинхронного двигателя устанавливались при некоторых постоянных значениях частоты fi и тока возбуждения iвг выбором соответствующего режима работы нагрузочной системы стенда. Это позволило испытать асинхронный двигатель мотор-колеса в условиях, наиболее близких к реальным режимам работы электропривода периодического действия на автопоезде.
Ток, напряжение и мощность асинхронного двигателя мотор-колеса замерялись методом двух ваттметров с использованием приборов электродинамической системы класса 0,2 с расширенным диапазоном частоты. Величина момента мотор-колеса измерялась силоизмерительными датчиками, установленными на стенде, сигнал с которых поступал на электронные потенциометрические приборы. Для того чтобы исключить влияние температуры на форму электромеханических характеристик, они снимались при постоянной температуре перегрева обмотки статора, равной 75°С. Скорость вращения синхронного генератора, а, следовательно, и частота системы, а также скорость вращения электромотор-колёс измерялись индукционными датчиками.
Рассмотрим полученные экспериментальные электромеханические характеристики мотор-колеса при двух основных режимах работы асинхронного двигателя, имеющих место при эксплуатации автопоезда: рабочем, соответствующем скольжению spaб, и пусковом − при скольжении sn.
На рисунке 1.22,а и б приведены зависимости крутящего момента мотор-колеса Мк, тока Iд, линейного напряжения Uд и коэффициента мощности асинхронного двигателя в функции частоты системы f1 для различного возбуждения синхронного генератора при spa6 = 0,22 и sn = 1. Эти характеристики соответствуют режиму работы электропривода при включении 1 передачи трансмиссии тягача.
Как следует из рисунка 1.22, а, для заданного iв.г= 60 А при увеличении частоты системы от 70 до 98 гц величина Мк.раб изменяется в пределах 4% от 37500 до 36000 Н∙м. На величину Мк.раб значительно влияет ток возбуждения синхронного генератора. При увеличении iв.г от 40 до 60 А при f1= const крутящий момент Мк..раб возрастает на 40%.
На напряжение Uд асинхронного двигателя основные параметры системы электропривода f1 и iв.г влияют примерно одинаково. С возрастанием частоты от 70 до 98 Гц при постоянных значениях тока возбуждения iв.г величина напряжения Uд увеличивается на 22%; при увеличении тока возбуждения генератора с 40 до 60 А и постоянных значениях частоты системы − на 24-25%.
|
|
|
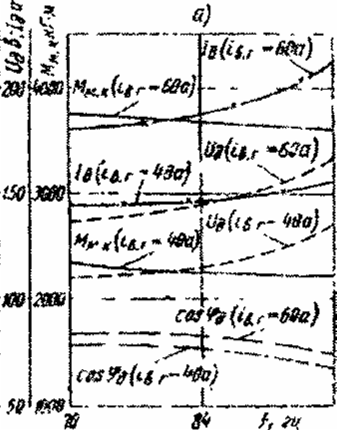
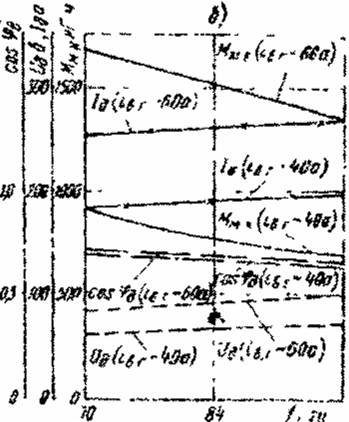
Рис. 1.22 Электромеханические характеристики мотор-колеса: а - в рабочем режиме (Sраб = 0,22); б - в пусковом режиме (Sа ≈ 1)
Величина Iд зависит более существенно от тока возбуждения синхронного генератора, чем от частоты системы. Так, при изменении iв г от 40 до 60 А при постоянных значениях частоты величина тока асинхронного двигателя возрастает на 37%, в то время как с увеличением частоты от 70 до 98 Гц при постоянном токе возбуждения − на 18%. Максимальное значение тока асинхронного двигателя Iд ≈ 213 А соответствует f1=98 Гц и iв г = 60 А.
Выводы: Выводы по разделу 1.3
1. Экспериментальные электромеханические характеристики мотор-колеса, полученные на универсальном стенде НАМИ при различных постоянных значениях частоты f1 и тока возбуждения iв.г позволяют провести анализ рабочего и пускового режимов работы асинхронного двигателя мотор-колеса, а также уточнить тяговые качества автопоезда, оборудованного механическим приводом колёс тягача и электроприводам периодического действия на переменном токе колес полуприцепа, при заданных условиях эксплуатации.
2. Экспериментальные исследования показали, что при работе асинхронного двигателя мотор-колеса со скольжением, превышающим критическое, система электропривода устойчива.
2.Конструктивные схемы ЭМ и АТС с КЭУ
Основные структурные схемы АТС с КЭУ на базе ДВС, разработана математическая модель энергетического баланса АТС с КЭУ для различных схемных решений и технологических циклов движения внутригородских АТС.
Рассмотрены следующие основные схемные решения АТС с КЭУ на базе ДВС:
Последовательная схема – создаются предпосылки для оптимальной компоновки,
снижения удельного расхода топлива и токсичности ОГ за счет оптимизации режимов работы ДВС. Однако, в данной схеме необходимы, как минимум две электрические машины, что обусловливает увеличение массы оборудования, а также снижение КПД за счет двойного преобразования энергии от ДВС в электрическую и далее в механическую.
Параллельная схема – может быть использована одна электрическая машина, рассчитанная на преобразование только той части энергии ДВС, которая ранее была передана на ТАБ. В этом случае снижаются масса оборудования и потери энергии, однако возможность стабилизации скоростных режимов ДВС отсутствует, поскольку частота вращения ДВС напрямую связана со скоростью автомобиля.
Смешанная схема – обладает преимуществами первых двух схем, однако предполагает увеличение массы оборудования и усложнение конструкции.
Важнейшим условием создания эффективной КЭУ является оптимальный выбор структурной схемы и выявление ключевых свойств её компонентов с целью последующего их использования при формировании единого энергетического комплекса АТС. Режимы работы компонентов взаимосвязаны таким образом, что положительные свойства дополняют друг друга, а отрицательные взаимоисключаются.
При
движении АТС с максимальной установившейся
скоростью vymax возможны
два энергетических состояния КЭУ на
базе ДВС. Первое отличается равенством
мощности, реализованной ДВС и подведенной
к ведущим колесам (ВК) при vy
max.
Второе характеризуется наличием
избыточной мощности ![]() Ре,
которая не может быть реализована для
целей тяги при движении со скоростью vymax,
но может расходоваться на заряд ТАБ.
Ре,
которая не может быть реализована для
целей тяги при движении со скоростью vymax,
но может расходоваться на заряд ТАБ.
В энергетическом балансе КЭУ ДВС является главным источником энергии. Предлагается выбор режимов работы ДВС производить на основе бифункциональной многопараметровой характеристики работы энергетической установки, представляющей собой универсальную многопараметровую характеристику ДВС с нанесенными на нее кривыми постоянных мощностей и кривыми работы КЭУ при движении по циклу (Правило № 83 ЕЭК ООН) путем выбора режимов работы ДВС в зоне минимальных удельных расходов топлива и замещения неэффективных (пуско-разгонных и др.) режимов, на работу на электроприводе. При работе КЭУ на базе ДВС возникают следующие основные потоки энергии: от ДВС и ТАБ на ВК в режиме тяги, от ДВС к ТАБ при заряде и от ВК к ТАБ при рекуперативном торможении, таким образом в объекте исследования выделено две подсистемы: энергетический баланс автомобиля и энергетический баланс КЭУ.
![]()
Затраты энергии на движение автомобиля: