

Конспект лекций - Электромеханические системы
.pdfузлы задержки времени. Функция памяти реализуется с помощью ОС. Электрические соединения в ПЛМ выполняются различными способами в зависимости от технологии исполнения. Недостатком ПЛМ является необходимость её замены в случае изменения алгоритма управления.
Аппаратный контроллер (АК). Содержит также микросхемы как мультиплексор MS, счетчик СТ. При изменении задачи управления изменяются электрические соединения входов и выходов АК, т.е. программирование осуществляется аппаратным путем.
ПЛМ и АК эффективны для ЭП, выполняющих жестко регламентированные технологические циклы, например в технологических линиях массового изготовления одних и тех же деталей или сборки одних и тех же изделий. В мелкосерийных производствах с изменением задач управления ЭП более эффективен следующий программируемый логический контроллер.
3) Программируемый логический контроллер (ПЛК). В состав ПЛК входят:
-устройства ввода и вывода;
-логическое устройство, выполняющее операции И,ИЛИ, повтор;
-запоминающее устройство для запоминания промежуточных переменных;
-устройство задержки времени;
-ПЗУ для хранения команд, формирующих алгоритм управления; Управляющее устройство, осуществляющее согласованную работу всех час-
тей ПЛК.
Вопросы для самопроверки
7)На каком уровне управления вырабатываются задания на движение рабочего органа?
Список литературы:
1. Терехов В.М. Системы управления электроприводов: учебник для студ. высш. учеб. заведений / В.М.Терехов, О.И.Осипов; под ред.В.М.Терехова. – М.: Издательский центр «Академия», 2006. – 304 с.
Тема 4.3. Системы управления скоростью ЭП постоянного тока
Цель и задачи: изучить системы управления скоростью электропривода постоянного тока
Учебные вопросы:
1.Системы модального управления
2.Наблюдающие устройства в СУ
3.Узлы токоограничения в системах управления скоростью
4.Система управления ЭП с подчиненным регулированием
5.Система двухзонного регулирования скорости ЭП
6.Адаптивные системы управления ЭП
4.3.1. Системы модального управления
Ряд современных регулирующих ЭП представляют собой ОУ, которым трудно придать устойчивость и требуемые высокие динамические показатели движения РО
51
даже с использованием простых методов управления в виде одной ОС и регулятора из-за большого числа переменных, определяющих динамическое состояние ЭП.
Например, это кается многодвигательных электроприводов некоторых типов манипуляторов, роботов, поворотных антенных установок у которых многомассовая подвижная часть, несколько входов и выходов.
Для таких ЭП используется способ управления из ТАУ, называемый модальным управлением.
Его суть заключается в замыкании отрицательными ОС по всем координатам привода (переменным состояния) и подборе коэффициентов этих ОС с целью получения желаемых характеристик ОУ относительно выходных координат.
Подбираемые координаты ОС составляют модальный регулятор (матрицу коэффициентов К).
Рассмотрим кратко данный способ применительно к ЭМС.
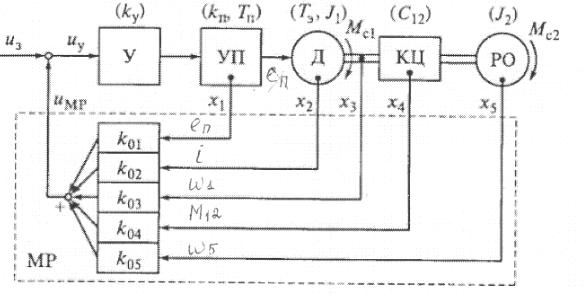
На рисунке представлена структура двух массовой ЭМС с модальным регулятором. В данной системе присутствуют две массы (ротор двигателя и рабочего органа РО), характеризуемые при вращательном движении моментами инерции У1 и У2. Две массы связывает упругое звено с коэффициентом жесткости С12, которое представляет собой кинематическую цепь КЦ, (длинный вал, редукторная передача, канатная, цепная, ременная передачи).
Рисунок – Структура двухмассовой электромеханической системы с модальным регулятором
Такой двух массовой системе при определенном соотношении параметров присущ резко колебательный характер движения.
52
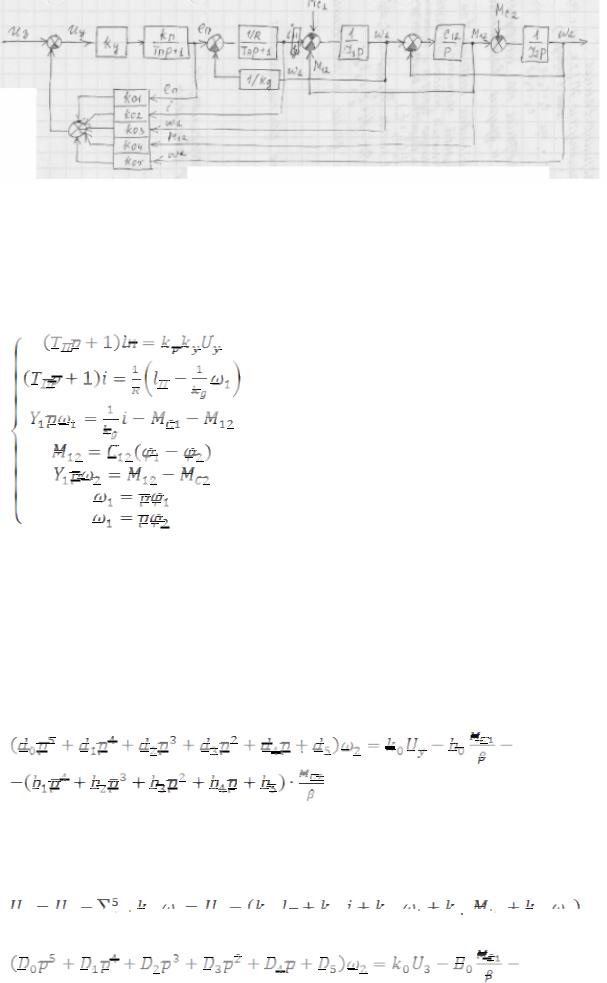
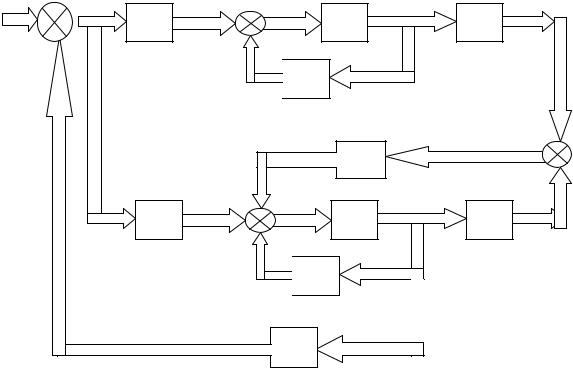
Рисунок - Структурная схема двухмассовой системы с МР Рассмотрим алгоритм синтеза модального регулятора (МР) что ЭП постоянно-
го тока с инерционным управляемым преобразователем (УП) (с Кп и Тп) и безынерционным усилителем У (с Ку).
Моменты сопротивления Мс1 и Мс2 скорость РО w2 и параметры подвижной части У1,У2, С12 приведены к скорости двигателя w1.
1) Запишем исходную систему уравнений электропривода
(1)
где lП – ЭДС УП, В;
ТЭ – электромагнитная постоянная вр. ,С; i – ток якоря , А;
R – сопротивление якорной цепи;
Kg – передаточный коэффициент двигателя, рад/с; 2) Выбираем переменные состояния
Х1= lП; Х2=I; X3=ω1; X4=M12; X5=ω2.
3) Решается система уравнений относительно выходной координаты ω2. Получается уравнение разомкнутого ЭП:
(2)
где К0 = КУ · КП · Кg – передаточный коэффициент разомкнутого ЭП β – жестокость механической характеристики
d0…d 5, b0…b 5 – коэффициенты уравнения (стр.100) 4) Добавляем уравнение замыкания




























































 (3) 5) В уравнение (2) подставляем (3), выражая переменные:
(3) 5) В уравнение (2) подставляем (3), выражая переменные:
53
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где |
D0…D 5, B0…B 4 – другие коэффициенты. |
||||||||||||||||||
|
6) В теории модального управления существует ряд нормированных уравне- |
||||||||||||||||||
ний, каждое из которых обеспечивает свои желающие параметры (табл. 5.1 стр 96). Выбираем, например, для σ=5% и относительного времени переходного процесса τп.п.=7.5 нормированное уравнение 5 порядка для замкнутого ЭП (т.к. урав-
нение 14 также 5 порядка) S5+C1S4+C2S3+C3S2+C4S+1=0
где С1=С4=4, С2=С3=8 Данное уравнение получено при настройке на модульный оптимум. Бывают
также и другие варианты.
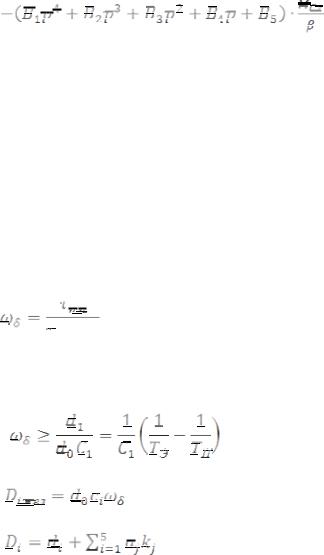
7) Задаем желаемое быстродействие системы tп.п.жел. и рассчитываем параметр базовой частоты:







 .
.
Чтобы обеспечить работоспособность системы (т.е. пониженную чувствительность к изменениям параметров и воздействий внутри контуров) накладывают ограничение:
8) Приравниваем желаемые константы:
к рассчитанным реальным:
Из полученных соотношений выражаются константы ki, а далее константы МР-koi.
Достоинства модального управления:
- возможность получения любого демпфирования и быстродействия «в ма-
лом»
-работоспособность СУ Недостатки:
-отсутствие токоограничения
-большое число изменяемых координат, т.е. повышенная потребность в дат-
чиках.
4.3.2. Наблюдающие устройства в СУ
К недостаткам модального управления относится потребность в дополнительных датчиках (по кол-ву переменных состояния). Датчики, особенно электромеханические – дорогостоящие устройства.
Кроме того, не все переменные (например момент или усилие, передаваемые через механическую передачу, низкая скорость РО, магнитный поток двигателя) могут быть доступны непосредственному измерению.
54
Поэтому для практической реализации МР труднодоступные измерению переменные состояния выделяются косвенным образом с помощью наблюдающего устройства или наблюдателя.
Наблюдающие устройства (НУ) выполняет функцию идентификации всего объекта или его части. И представляет собой ММ. Но в отличие от расчетной модели наблюдатель:
1)работает в реальном времени;
2)Имеет общие с объектом наблюдения физические входные переменные Ui;
3)дополняется ОС по разности между доступными измерениями выходными переменными yi объекта управления и их математическими оценками наблюдения.
Рассмотрим структуру СУЭП с НУ.
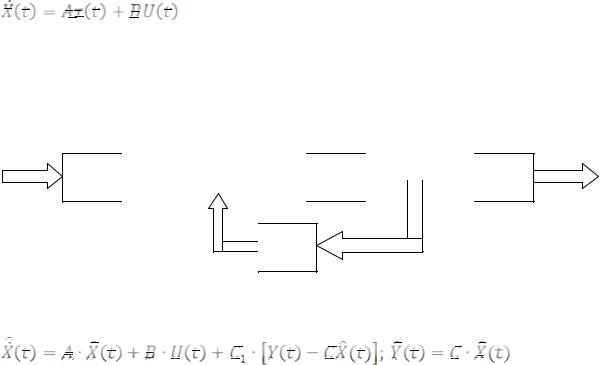
Объект управления (электропривода) имеет m-вектор входных переменных U(t) и n-вектор выходных переменных Y(t) и n-вектор переменных состояния X(t).
V(t) – это m-вектор задающих сигналов
Для ОУ уравнения в матричной форме выглядят с.о.:
Y(t)=CX(t)
Где А – квадратичная матрица ОУ (nxn),
В – прямоугольная матрица управления (nxm),
С – прямоугольная матрица выходов, доступных измерению (rxn). I – единичная матрица (rxr).
В 

 I/P
I/P  C
C
A
Рисунок Векторно-матричная схема объекта управления
Для наблюдателя уравнение в матричной форме:
где X(t) – вектор состояния ЭП, рассчитываемый наблюдателем;
С1 – матрица (nxm) регулятора НУ, учитывающая разность вектора выходных переменных Y(t) доступных измерению и вектором математических оценок X(t) НУ.
Y(t) – вектор выходных переменных, рассчитанных наблюдателем. Для МР матричное уравнение записывается в виде:
U(t)=V(t)-KX(t),
где К – матрица МР, т.е. МР получает информацию о состоянии ОУ от НУ косвенно выявленным способом.
Иногда при наличии датчиков для некоторых переменных состояния можно понизить ранг НУ (который ранее соответствовал рангу ОУ), тем самым упростить НУ.
С пониженным (редуцированным) рангом НУ получило название редуцированное наблюдающее устройство (РДУ). В этом случае оцениваются только те переменные состояния Xi=Wi, которые недоступны измерению, а переменные У, дос-
55
тупные измерению, формируются датчиками. Тогда объектом наблюдения будет не ось ОУ, а только его часть.
В |
I/P |
C |
A
C12
В |
I/P |
C |
A
K
Рисунок - Векторно-матричная схема ОУ с НУ и МР
4.3.3. Узлы токоограничения в СУ скоростью ЭП
Следующим недостатком модального управления является отсутствие ограничения координат при больших изменениях входных воздействий.
А свойство линейной системы такое, что отработка разных по величине воздействий осуществляется за одно и то же время переходного процесса. Так, например, при увеличении задающего сигнала по скорости ЭП возрастают одновременно ускорение и ток, значения которых могут оказаться недопустимыми.
Устранить перегрузки по току и ускорению, можно путем ограничения темпа изменения входного сигнала с помощью специального формирующего устройства – задатчика интенсивности. Однако, при приложении к валу двигателя больших моментов нагрузки сохраняется возможность возникновения недопустимых перегрузок по току и моменту.
Улучшить свойства можно с помощью нелинейных ОС – отсечек. Нелинейность позволяет оставлять действие связи на том интервале изменения контролируемой величины, где это действие желательно, и исключить его там, где оно ухудшает качество системы.
Рассмотрим различные виды отсечек. 1) Токовая отсечка
Выполняет задачу исключения токовой связи в зоне рабочих нагрузок необходима связь по току, чтобы ограничить токи и моменты в режимах стопорения, пуска и торможения.
56
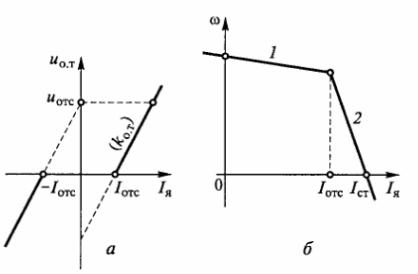
Рисунок – Характеристики токовой отсечки (а) и электропривода с токовой отсечкой (б)
Нелинейность токовой отсечки представлена на рисунке и имеет зону нечувствительности, которая создается стабилитронами с напряжением UСТ.
При этом участок электромеханической характеристики соответствует рабочему участку 1.
При достижении током значения ±IОТС включается ОС по току и появляется напряжение токовой связи:
UО.Т.=UДТ−U ОСТ=кО.Т.IЯ−U ОСТ=кО.Т.(IЯ−I ОТС) для |IЯ|≥|IОТС|
где кО.Т. – передаточный коэффициент датчика тока, Ом IОТС – ток отсечки, А,
IОТС=UОТС/кО.Т.
На электромеханической характеристике этому режиму соответствует зона 2, действующая от IОТС до тока стопорения IСТ.
Недостатком токовой отсечки в ЭП с тиристорным преобразователем является возможность превышения мгновенным током стопорного значения в начале процесса пуска.
Этого недостатка лишен следящий вид отсечки.
2) Упреждающее токоограничение Смысл заключается в том, что одновременно с задающим сигналом подается
управляющий сигнал, который соответствует заданному допустимому уровню тока. Для этого может быть использована отрицательная ОС по скорости (отсечка
по скорости) или положительная по напряжению.
Рассмотрим совмещенный узел с отсечками по скорости и току.
Сигнал UО.Т. после датчика тока (ДТ) и стабилитрона подается на вход усиления У2.
Предположим, что усилитель У1 насыщен, т.е. ….
57
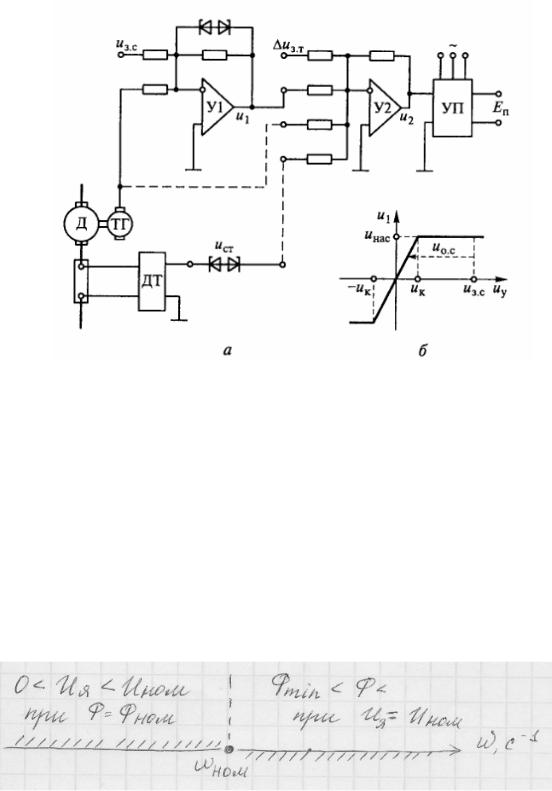
Рисунок – Схема совмещенного узла с отсечками по скорости и току (а) и характеристика отсечки по скорости (б)
4.3.4.Система управления ЭП с подчиненным регулированием
См. методические указания
4.3.5.Система двухзонного регулирования скорости ЭП
Принцип двухзонного регулирования скорости заключается в следующем:
1)в диапазоне регулирования до номинальной скорости обеспечивается изме-
нением напряжения на якоре двигателя от нуля до номинального значения UНОМ при номинальном потоке возбуждения.
2)При скорости выше номинальной – изменением потока возбуждения двигателя при постоянном напряжении на якоре или ЭДС двигателя.
Регулирование в 1 зоне аналогично системе с подчиненным регулированием. Рассмотрим особенности регулирования скорости в зоне изменения магнитно-
го потока.
С увеличением скорости выше номинальной w˃wНОМ за счет уменьшения магнитного потока Ф≈1/ω при UЯ=UНОМ. Меняется пропорционально потоку (М=Ф), а допустимая мощность Р=РНОМ остается постоянной.
Поэтому применение двухзонного регулирования скорости целесообразно для тех механизмов у которых на высоких скоростях снижается момент статической нагрузки. Например, реверсивный стан горячей прокатки, у которого при последних пропусках, когда длина прокатываемого металла становится большой, а усилия вре-
58
мени прокатки и увеличения производительности стана, скорости привода увеличивается за счет уменьшения магнитного потока Д.
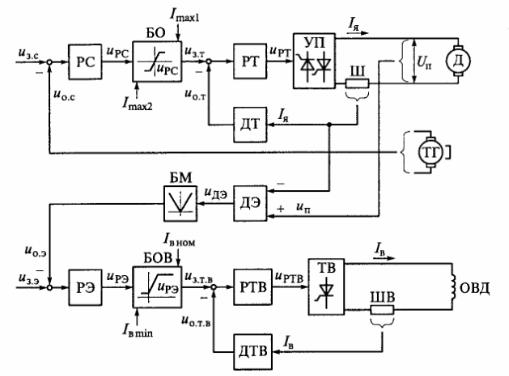
Рассмотрим функциональную схему ЭП с двухзонным регулированием. Для регулирования в 1 зоне используется контур тока якоря (с датчиком скорости – тахогенератором ТГ и регулятором скорости РС).
Рисунок – Функциональная схема электропривода с двухзонным регулированием скорости
Для регулирования во 2 зоне (при w>wНОМ) используется внутренний контур регулирования тока возбуждения и внешний контур ЭДС двигателя (или, иногда, напряжения на якоре).
Контур тока возбуждения (КТВ) включает:
-тиристорныйвозбудитель ТВ;
-регулятор тока возбуждения РТВ с выходным напряжением UРТВ;
-датчик тока возбуждения ДТВ с коэффициентом передачи kО.ТВ.;
-шунт тока возбуждения ШВ в цепи обмотки возбуждения двигателя ОВД.
4.3.6. Адаптивные СУ скоростью ЭП
Рассмотренные способы управления применяются к линейным ОУ с заранее известными и неизменными параметрами.
Если параметры меняются, возникает задача адаптации, которая решается в адаптивных СУ автоматическим путем – изменением параметров регуляторов и формирование дополнительных воздействий к действиям регуляторов.
Адаптивное управления используется при непостоянстве параметров следующих типов:
1)параметр ЭП остается неизменным или изменяется незначительно, но неизвестно его исходное значение;
2)параметр ЭП существенно изменяется относительно его известного или неизвестного значения.
59
Изменяемыми параметрами ЭП могут быть:
1)момент инерции из-за изменения массы груза в подъемно-транспортных установках, взаимосвязи механических координат в многокоординатных манипуляторах и роботах;
2)индуктивность в цепях возбуждения с насыщением магнитной системы;
3)коэффициенты усиления в управляемых преобразователях из-за изменения энергетического уровня источника питания;
4)активное сопротивление в силовых цепях из-за изменения температурного
режима.
Кроме изменяемых параметров ЭП на показатели качества может оказывать влияние и изменяемое возмущающее воздействие (например, труднодоступный измерению момент нагрузки).
В ТАУ наиболее детально разработаны беспоисковые адаптивные системы управления (БАС), которые применяют и к ЭМС.
Среди них выделяют 2 класса:
1)БАС с эталонной моделью в виде динамического звена с желаемой динамикой (АСЭМ – адаптивная система с эталонной моделью)
2)БАС с настраиваемой моделью в виде адаптивного наблюдающего устройства (АСНМ – адаптивная модель с настраиваемой моделью)
Кратко рассмотрим каждую из них.
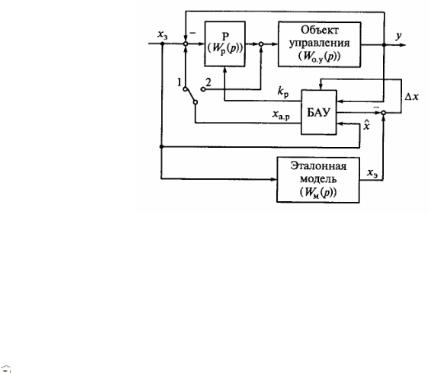
АСЭМ состоит из ОУ, регулятора Р, блока адаптивного управления БАУ и эталонной модели ЭМ.
Рисунок - Адаптивная система с эталонной моделью Параметры регулятора Р объекта управления подстраиваются под желаемый
динамический процесс, задаваемый эталонной моделью, корректировка параметров Р, т.е. параметрическая адаптация, осуществляющаяся БАУ.
В составе БАУ имеется наблюдающее устройство, которое оценивает недоступные измерению переменные, и формирователь выходного корректирующего воздействия по отклонениям переменных состояния эталонной модели ХЭ (т.е. по раз-
ностям Х-

 ).
).
Выходное воздействие БАУ предоставляется в виде соотношения КР, изменяющего параметр регулятора Р или суммирующего сигнала ХА.Р., поступающего на вход Р (позиция 1 переключателя) или на выход Р (позиция 2 переключателя).
Также в подобной системе может использоваться сигнальная адаптация, тогда БАУ представляет собой функционально адаптивный модальный регулятор.
60