

Конспект лекций - Электромеханические системы
.pdfПри увеличении RPP возрастает Sкр, при этом Мmax а, следовательно перегрузочная способность двигателя остаются неизменными. Двигатель переходит в режим иск. Мех. Характеристики и частота уменьшается до n`HOM.
Диапазон регулирования широкий, но изменение частоты возможно только «вниз».
С увеличением ступеней РР повышается плавность регулирования, но при этом возрастает стоимость коммутирующих устройств.
3.3.2. Регулирование частоты вращения АД с КР изменением числа полюсов в обмотке статора
Для этого изготавливают многоскоростные АД с КР. В пазах сердечника статора такого двигателя располагают 2 независимых обмотки с разным числом полюсов либо одну полюсно-переключаемую обмотку. Эта обмотка имеет конструкцию, которая позволяет методом переключения катушечных групп получать разное число полюсов (статора).
В трехскоростом двигателе на статоре распологают одну обмотку с фиксированным числом полюсов и одну переключаемую.
Если же на статоре установить 2 переключаемые обмотки, то получим 4-х скоростной двигатель.
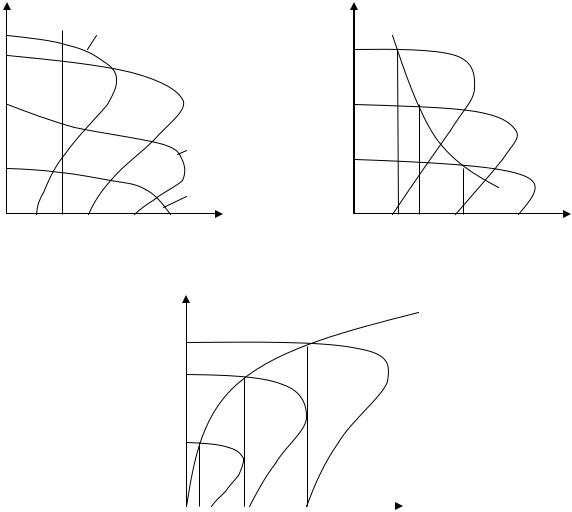
Рассмотрим некоторые схемы соединения катушечных групп обмоток статора.
Схема «звезда/двойная звезда» (У/УУ) дает изменение числа пар полюсов в отношении 1:2 (рис. а). Эти схемы обеспечивают двигателю режим постоянного момента, т.е. при переключении обмотки статора с одной схемы на другую вращающий момент остается неизменным (М=const), а мощность изменяется частоте вра-
щения, т.е. в 2 раза (РУУ4/РУ8=2).
Эти схемы переключения целесообразно применять в ЭП с постоянно действующим моментом нагрузки при изменении частоты вращения.
8c1 |
8c2 |
8c3 |
4c1 |
4c2 |
4c3 |
|
8c1 |
8c2 |
8c3 |
4c1 |
|
4c2 |
|
|
4c3 |
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2p1=8 |
2p2=4 |
2p1 |
2p2=4 |
а) «звезда/двойная звезда» |
|
б) «звезда/звезда» |
|
41
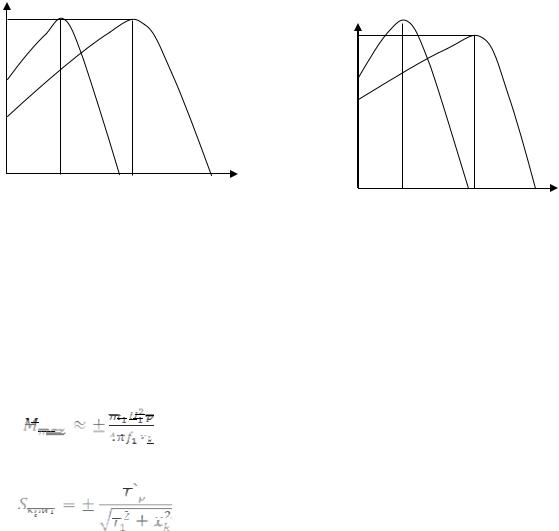
Рис.3.6. Схемы переключения обмоток
Схема «звезда/звезда» (У/У) так же дает изменение числа пар полюсов в отношении 2:1, но она создает в АД режим постоянной мощности, т.е. при переключении обмотки мощность Д остается практически неизменной (Р≈const), а момент изменяется в 2 раза (МУ8/МУ4≈2).
Эти схемы следует применять в ЭП, в котором момент нагрузки меняется обратно пропорционально частоте вращения.
M1 |
M2 |
M1 |
M |
|
M2 |
|
|
M |
|
n |
n |
|
|
|
n1 |
n2 |
n2 |
|
n1 |
|
|
M2=const |
P2=const |
Рис.3.7. Механические характеристики при постоянных моменте или мощности
3.3.3. Регулирование частоты вращения АД изменением подводимого напряжения
При изменении подводимого к обмотке статора напряжения U1 максимальный момент Mmax меняется пропорционально квадрату этого напряжения:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
(3.21) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
а критическое скольжение SКР остается неизменным, т.к. не зависит от U1: |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.22) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
. |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||
В АД общего назначения диапазон такого регулирования получается весьма узким, т.к. механические характеристики этих двигателей жесткие (рис.3.8.а)
42
n n1
nном n`ном
nкр
0,25U1 
 Мс.в. 0,5U1
Мс.в. 0,5U1
U1
Мmax
M
М`n |
Мc Мn |
|
Мmax |
n
n1
nном
n`ном |
0,5U1 |
|
U1
nкр
 Мmax М
Мmax М
Мc Мmax Мn
а) Для АД общего назначения б) Для АД с повышенным скольжением Рис.3.8. Механические характеристики при регулировании изменением подводимого
напряжения
Несколько лучше этот метод реализуется в АД с повышенным скольжением (повышенным сопротивлением короткозамкнутой обмотки ротора), у которых механические характеристики менее жесткие (рис.3.8.б).
Изменять напряжение можно только вниз от номинального. Недостатки метода: большие потери и его чрезмерный перегрев.
Изменять напряжение питания можно посредством регулировочного авто- трансформатора АТ, включенного в линейные провода между сетью и обмоткой статора (рис.3.9.).
А так же трехфазным дросселем насыщения ДН (рис.3.10). Рабочие обмотки дросселя создают в цепи индуктивное сопротивление: ХРО, при этом напряжение на входе двигателя:
U`1=U1-jXpoI1. |
(3.22) |
|
ДН |
|
|
+ |
|
|
ОУ |
РО |
|
|
|
Д |
_ |
|
|
|
|
Д |
Рис.3.9. АД с автотрансформатором |
Рис.3.10. АД с дросселем насыщения |
Обмотка управления ОУ подключена к источнику постоянного тока. Величина тока в ОУ влияет на ХРО. С увеличением IУПР усиливается магнитное пресыщение сердечников дросселя и ХРО уменьшается (U`1 повышается, n↑) и наоборот.
Громоздкие дроссели увеличивают габариты и удорожают ЭП, что является причиной, ограничивающей их применение.
43

Более рациональным является применение тиристорного регулятора напряжения (см.следующий способ).
3.3.4. Регулирование изменением частоты питающего напряжения – частотное регулирование
В связи с разработкой и широким применением полупроводниковых преобра- зователей частоты (ПЧ) этот способ является наиболее перспективным.
При изменении частоты тока f1 меняется синхронизирующая частота вращения поля статора (n1=f160/p), а, следовательно, и частота вращения ротора n.
Преобразую выражение максимального момента АД:
и принимая во внимание, что индуктивное сопротивление: |
|
XK=2πf1Lk |
(3.23) |
получим упрощенное выражение максимального момента АД: |
|
Mmax≈CU12/f12 |
(3.24) |
где С=m1p/(8π2Lk) – постоянная для данного двигателя.
Из этого выражения следует, что с изменением частоты питающего напряжения f1 меняется величина Mmax, а, следовательно, его перегрузочная способность
.
Потому, чтобы сохранить перегрузочную способность двигателя на требуемом уровне, необходимо одновременно с изменением f1 менять U1, подводимое к обмотке статора.
Характер одновременного изменения f1 и U1 зависит от вида графика изменения статического момента нагрузки в конкретном ЭП.
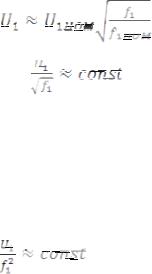
1) Если статический момент Мс реактивный, т.е. его величина неизменна и частота вращения в ЭП регулирующаяся при соблюдении условия постоянства мо- мента М≈9,55p/n≈const то подводимое к двигателю напряжение необходимо изменять пропорционально изменению частоты:
U1≈U1HOM(f1/f1HOM), (3.25)
где U1HOM и f1HOM – номинальные значения напряжения и частоты тока, подводимые к обмотке статора;
U1 и f1 – фактические значения.
44
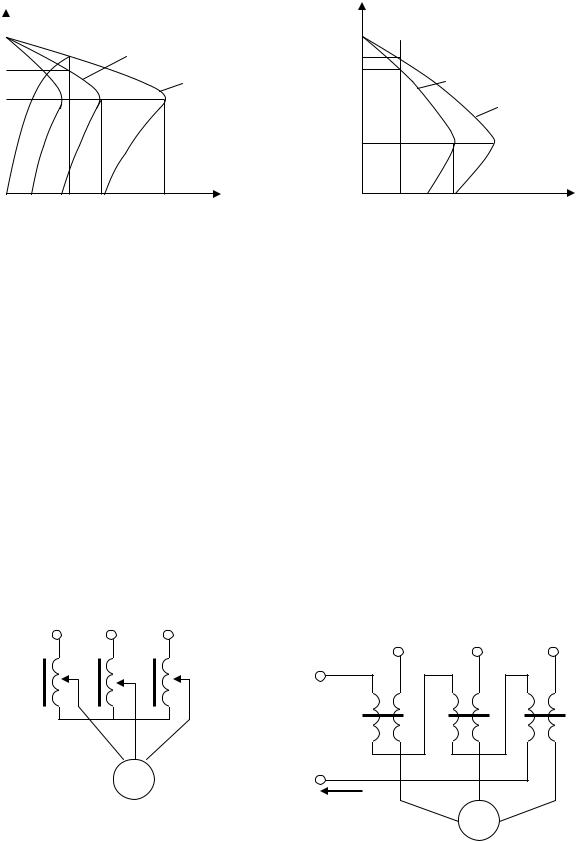
n |
|
n |
Mc |
|
Mc |
f14>f1 |
|
f1 |
|
n0 |
n0 |
|
||
|
|
|
||
n01 |
|
n01 |
|
f11<f1 |
|
|
|
||
|
f11<f1 |
|
|
|
n02 |
|
n02 |
|
f12<f11 |
|
f12<f11 |
|
|
|
|
M |
|
|
M |
а) постоянство момента |
|
б) постоянство мощности |
||
n |
Mc |
|
n0
f1
n01
f11<f1
n02 f12<f11
M
в) вентиляторная нагрузка Рис.3.11. Механические характеристики при частотном регулировании
Механические характеристики на рис.3.11.а во всем диапазоне нагрузок характеристики остаются жесткими, а перегрузочная способность сохранятся неизменной.
Исключение когда f14>f1, т.е. частота питающей сети выше номинальной. Предполагаемое при этом увеличение U1 сверх номинального значения недопустимо по условиям эксплуатации двигателей.В этих условиях увеличение частоты тока не сопровождают повышением напряжения и его оставляют равным номинальному значению. При этом частота вращения растет, а Ммах и перегрузочная способность падают.
Потребляемая двигателем при этом способе регулирования мощность изменяется пропорционально изменению частоты n.
2) Если график статического момента нагрузки МС имеет вид рис.3.11.б и регулирование частоты вращения ЭП происходит при условии неизменной мощности двигателя, то соблюдается условие постоянства мощности, т.е. Р=0,105Mn≈const и подводимое напряжение следует изменять в соответствии с выражением:
45
|
|
, |
(3.26) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
||||||||||
т.е. |
. |
(3.27) |
||||||||||||||
Электромагнитный момент в этом случае изменяется обратно пропорционально частоте вращения, т.е. М=0,95р/n.
3) В случае вентиляторного характера нагрузки напряжение U1, подводимое к обмотке статора, необходимо изменять пропорционально квадрату частоты переменного тока:
. |
(3.28) |
Вопросы для самопроверки
1)Можно ли организовать реостатное регулирование АД с короткозамкнутым ротором и почему?
2)Что из себя представляют многоскоростные двигатели и какой способ регулирования они используют?
3)Для каких двигателей более эффективен способ регулирования частоты вращения изменение подводимого напряжения?
4)Как технически можно изменять величину подводимого к асинхронным двигателям напряжения?
5)Какой способ регулирования скорости Ад является наиболее перспективным?
6)Почему при частотном способе регулирования одновременно с частотой необходимо менять напряжение?
7)Как необходимо изменять напряжение согласно частоте при условии постоянства момента?
8)Как необходимо изменять напряжение согласно частоте при условии постоянства мощности?
9)Как необходимо изменять напряжение согласно частоте при вентиляторной нагрузке?
Список литературы:
1.Кацман М.М. Электрический привод: Учебник для студ. образоват. учреждений сред. проф. образования. – М.: Издательский центр «Академия», 2005. – 384с. ISBN 5-7695-2060-4
2.Москаленко В.В. Электрический привод: Учеб. пособие для проф. образования. – 3- е изд., стер. – М.: Издательский центр «Академия», 2005. – 368 с. ISBN 5-7695-2502-9.
46
Модуль 4. СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
Тема 4.1. Общая характеристика систем управления электроприводами
Цель и задачи: познакомиться с функциональным разделением систем управления на системы управления верхнего (технологического) и нижнего уровней, рассмотреть классификацию систем управления исходя из данного подхода.
Учебные вопросы:
1.Структура системы управления с верхним и нижнем уровнем.
2.Распределение задач систем управления на каждом уровне.
3.Классификация систем управления электроприводами.
В системе управления электроприводом СУЭП объектом управления является двигатель Д совместно с механической передачей МП и рабочим органом РО.
По функциональному назначению управление разделяется на два уровня:
1)верхний – технологический, являющийся внешним уровнем относительно электропривода (СУЭП 1);
2)нижний – внутренний относительно электропривода (СУЭП 2).
СУЭП 1 вырабатывает технологическое задание на движение РО отдельной технологической установки (станка, крана, лифта) или целой технологической системы (системы теплоснабжения, водо- и электроснабжения.)
СУЭП 2 формирует собственно свойства ЭП, его статические, динамические и точностные характеристики.
Различаясь функционально, СУЭП1 и СУЭП2 конструктивно могут быть выполнены из разных блоков, но могут и объединяться в общей панели управления или в едином управляющем устройстве – программируемом контроллере.
Вопросы для самопроверки
1)На каком уровне управления вырабатываются задания на движение рабочего органа?
2)На каком уровне формируются динамические свойства электропривода?
3)Могут ли СУЭП1 и СУЭП2 конструктивно выполнены в виде одного блока?
4)По каким координатам могут быть организованы обратные связи для СУЭП1 и СУЭП2?
5)К какому уровню относятся релейно-контакторные и дискретно-логические системы управления?
6)Различаются ли системы управления скоростью для электроприводов постоянного и переменного тока?
Список литературы:
1. Терехов В.М. Системы управления электроприводов: учебник для студ. высш. учеб. заведений / В.М.Терехов, О.И.Осипов; под ред.В.М.Терехова. – М.: Издательский центр «Академия», 2006. – 304 с.
Тема 4.2. Логические систем управления электроприводами
47
Цель и задачи: изучить понятие релейно-контакторных и дискретнологических СУ, их устройства, достоинства и недостатки.
Учебные вопросы:
1.Релейно-контакторные систем управления.
2.Контактные и бесконтактные логические систем управления.
3.Программируемая логическая матрица.
4.Аппаратный контроллер.
5.Программируемый логический контроллер.
4.2.1. Релейно-контакторные систем управления электроприводами
Релейно-контакторные системы управления (РКСУ) строятся на основе релей- но-контакторной элементной базы и осуществляют автоматизацию работы двигателей путем выполнения следующих операций:
-включение и отключение двигателя;
-выбор направления и скорости вращения;
-пуск и торможение двигателя;
-создание временных пауз в движении;
-защитное отключение и остановка механизма.
ЭП с РКСУ представляет собой простой нерегулируемый механизм ЭП, в основном общепромышленного применения (ЭП кранов, тихоходных лифтов, вентиляторов, насосов и т.д.), используются АД синхронных ДПТ последовательного и смешанного возбуждения.
РКСУ состоит из двух частей:
1)Управляющей, формирующей алгоритм управления;
2)Исполнительной, непосредственно осуществляющая управляющие воздействия на двигатель (контакторы К)
Управляющая часть Р в свою очередь делится на:
Р1 – формирует общие команды на движение механизма М согласно его технологическому режиму работы
Р2 – формирует необходимое качество движения.
Конструктивно они могут быть как разделены, так и объединены в виде единого управляющего устройства.
48
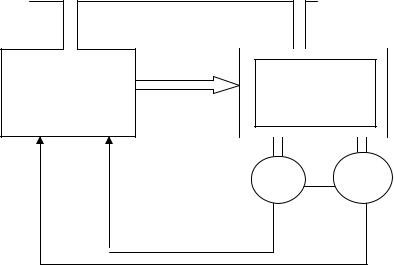
Электрическая сеть
Р |
К |
|
Р1  Р2
Р2
Д М
М
Рисунок – Управляющая и исполнительная части РКСУ
Для выполнения разных технологических задач требуется набор некоторых операций, называемые типовыми функциями. В выполнении каждой функции участвует часть РКСУ – типовой узел. Т.о. в составе РКСУ всегда будет присутствовать те или иные типовые узлы (1,2,3,4).
Пятый узел зависит от решения конкретной технологической задачи. Достоинства РКСУ:
-наличие гальванической развязки цепей;
-значительная коммутационная мощность;
-высокая помехоустойчивость;
-возможность использования единственного источника питания для силовых
иуправляющих цепей.
Недостатки РКСУ:
-контактная коммутация, требующая соответствующего ухода за аппаратурой
иограничивающая срок её службы;
-ограниченное быстродействие;
-повышенные массогабаритные показатели и энергопотребление.
49

УЗЕЛ ВКЛЮЧЕНИЯ - ОТКЛЮЧЕНИЯ
УЗЕЛ ПУСКА
УЗЕЛ ТОРМОЖЕНИЯ
УЗЕЛ ЗАЩИТЫ
УЗЕЛ АВТОМАТИЗАЦИИ ТЕХНОЛОГИЧЕСКОГО
ПРОЦЕССА Рисунок – Общая функциональная схема РКСУ
4.2.2. Дискретно-логические системы правления
Дискретные логические системы управления (ДЛСУ) строятся на дискретной элементной базе. Могут выполняться на контактной и безконтактной аппаратуре с использованием реле, логических элементов цифровых узлов, программируемых логических контроллеров.
В отличие от РКСУ в ДЛСУ могут присутствовать датчик ОС.
Системы управления на релейных или простых логических элементах (И,ИЛИ,НЕ триггерах) менее предпочтительны из-за требуемого большого числа этих элементов, т.к. усложняется их монтаж, ухудшаются массогабаритные и надёжностные показатели.
Также ДЛСУ используются в тех случаях, когда установка содержит несколько рабочих органов (РО), каждый из которых приводится в движение своим индивидуальным двигателем. СУ в этом случае осуществляют согласованную работу этих двигателей. Примеры таких установок:
-лифт, имеющий в качестве РО кабину, дверь кабины, дверь шахты;
-станок с инструментальным механизмом и с механизмом подачи инструмен-
та;
- многокоординатный манипулятор и т.п. Поэтому более предпочтительны ДЛСУ на основе: 1) программируемой логической матрицы (ПЛМ)
Основу данного устройства составляет микросхема ПЛМ, выполняющая операции И, ИЛИ, НЕ и логическую функцию. Также содержатся узлы ввода и вывода,
50