

3.2. Задание по работе:
1. Изучение описания методики расчета параметров силовой части электропривода
постоянного тока.
2. Расчёт параметров силовой части электропривода для электромеханической системы привода подъема ковша одноковшового экскаватора (система генератор-двигатель)
3.3.Решение:
1. Количество электродвигателей в приводе по данным табл. 1 для экскаватора-драглайна или по известной мощности генератора и двигателя для карьерного экскаватора.
Число электродвигателей – 8 шт.
3.3.1 Номинальная угловая частота вращения электродвигателя и номинальный момент:


3.3.2 Коэффициентом превышения момента двигателя в переходных режимах пуска над номинальным λв пределах 1,8…2,0.
Задаюсь λ=2;
3.3.3 Стопорный момент всех электродвигателей в приводе:


3.3.4 Суммарное сопротивление обмоток якоря генератора и двигателя, учитывая схему соединения, по паспортным данным электрических машин:
 ;
;



3.3.5 Индуктивность якорных обмоток генератора и двигателя и суммарная индуктивность с учетом схемы соединения электрических машин:


3.3.6 Расчет постоянной времени обмотки якоря эквивалентных генератора и двигателя
как отношение суммарной индуктивности в суммарному сопротивлению. Силовая часть
электропривода выполнена по системе ТП-Д, расчет постоянной времени производится по
выражению:

3.3.7 Параметры передаточной функции якорной цепи в именованных и относительных единицах:



Номинальная
ЭДС генератора:

Значение стопорного тока:

3.3.8 Коэффициент усиления генератора:

3.3.9 Постоянная времени передаточной функции обмотки возбуждения генератора:






3.3.9 Параметры передаточной функции обмотки возбуждения генератора в
именованных и относительных единицах:


3.3.10 Коэффициент усиления в именованных и относительных единицах
тиристорного (или транзисторного) преобразователя для питания обмотки возбуждения
генератора:

Т.к. в нашем
случае система Г-Д, то базовое напряжение
ТП:



В системе
Г-Д тиристорный преобразователь служит
для питания обмотки возбуждения
генератора. Для быстрого изменения
напряжения генератора и, следовательно,
тока якоря, применяют так называемую
форсировку по напряжению возбуждения
генератора, которая заключается в
превышении значения напряжения ТП по
сравнению с номинальным напряжением
возбуждения генератора
 в
2-4 раза в период переходных режимов
работы электропривода. Снятие форсировки
после окончания переходного процесса
осуществляется системой управления.
в
2-4 раза в период переходных режимов
работы электропривода. Снятие форсировки
после окончания переходного процесса
осуществляется системой управления.
Т.о.

3.3.11


Рис. 7 Алгоритмическая структурная схема силовой части электропривода
4. «Расчет параметров регулятора момента (тока)
в системе управляемый преобразователь-двигатель (УП-Д)»
Рассчитать параметры унифицированного контура регулирования момента в системе
ТП-Д и оценить точность регулирования.
Тип двигателя МПЭ-500-500
Данные
двигателя:


тока

Для питания двигателя используется реверсивный тиристорный преобразователь:


 кратность допустимой
кратковременной перегрузки по току
кратность допустимой
кратковременной перегрузки по току
 ,
суммарное эквивалентное сопротивление
силовой цепи преобразователя
,
суммарное эквивалентное сопротивление
силовой цепи преобразователя
Суммарный
приведенный момент инерции электропривода
 Постоянная времени якорной цепи
Постоянная времени якорной цепи .
В якорную цепь включен шунт 200 А, 75 м.
Коэффициент датчика тока
.
В якорную цепь включен шунт 200 А, 75 м.
Коэффициент датчика тока

![]()
Рис. 8 а) Функциональная, б) структурная, в) упрощенный вид структурной схемы
Расчеты:
Коэффициент усиления преобразователя.

Суммарное сопротивление якорной цепи:


Значение емкости конденсатора :

Значение
 приведенное к задающей цепи.:
приведенное к задающей цепи.:


Коэффициент шунтирования:


Примем:

Коэффициент усиления регулятора:



Стопорный ток электропривода:

Максимальное напряжение задания тока:

Коэффициент
ЭДС двигателя:

Стопорный момент :

Электромеханическая постоянная времени:


Относительная ошибка регулирования момента и тока в процессе пуска с Мс=0:

Абсолютная ошибка по току (расхождение между статической и динамической механическими характеристиками):


Абсолютная ошибка при пуске с Мс:


Желаемая для настройки на технический оптимум передаточная функция разомкнутого контура регулирования тока:

Передаточная
функция объекта регулирования:

Передаточная
функция регулятора тока:

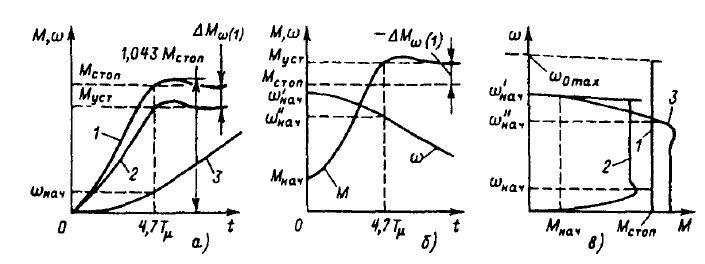
Рис. 9 а),б) Графики переходных процессов, в) механические характеристики при регулировании момента

Рис. 10 Модель контура регулирования тока электропривода экскаватора ЭКГ-20


Рис. 11 Механические характеристики