

§ 3.4. Установившаяся ошибка при произвольном воздействии (коэффициенты ошибок)
В общем случае изображение ошибки ε(t) воспроизведения задающего воздействия g(t) выражается формулой
![]()
Передаточную функцию можно (см. § 1.1) определить как преобразование Лапласа весовой функции
![]()
где kε(t)— весовая функция для ошибки, т. е. реакция замкнутой системы в точке измерения ошибки (рассогласования) на мгновенный единичный импульс внешнего задающего воздействия g(t) = δ(t).
Величину установившейся ошибки при произвольной форме задающего воздействия (см. § 3.1) можно записать в виде
![]()
Последнее выражение следует из того, что при τ > t аргумент функции g(t - τ) будет отрицательным, а при отрицательном значении t - τ принимается g(t - τ)=0. Поэтому замена конечного предела t бесконечным не меняет результата.
Разложим g(t - τ) в ряд:

Подставив это в соотношение (3.26), получим выражение вида

где коэффициенты c0, c1 , ... определяются из (3.26) следующим образом. Очевидно,

поэтому согласно формуле (3.25) имеем
![]()
Аналогично из (3.26) получаем
![]()
и согласно (3.25) находим
![]()
и т. д.
Общий член разложения (3.27) согласно (3.26) будет иметь коэффициент
![]()
или на основании (3.25)
![]()
Итак, установившаяся ошибка при произвольном задающем воздействии g(t) определяется формулой (3.27) с коэффициентами (3.28)—(3.30). Последние называются коэффициентами ошибок.
На практике ограничиваются небольшим конечным числом членов i.
Вычисление коэффициентов ошибок непосредственно по формулам (3.28)—(3.30) неудобно. Поэтому практически применяется другой способ, который вытекает из следующего рассуждения.
Разложим передаточную функцию Фε(s) в ряд

Как видно, в этом разложении фигурируют выражения для коэффициентов ошибок (3.28)—(3.39). Следовательно,
![]()
Но Фε(s) является отношением многочленов, т. е.
![]()
Очевидно, что произведя простое деление многочлена числителя (3.32) на многочлен знаменателя по известному алгебраическому правилу, мы и получим выражение
типа (3.31), а значит, и значения всех коэффициентов ошибок.
После этого, подставив (3.31) в формулу
![]()
и переходя к оригиналам, получим
![]()
что совпадает с ранее полученным (3.27).
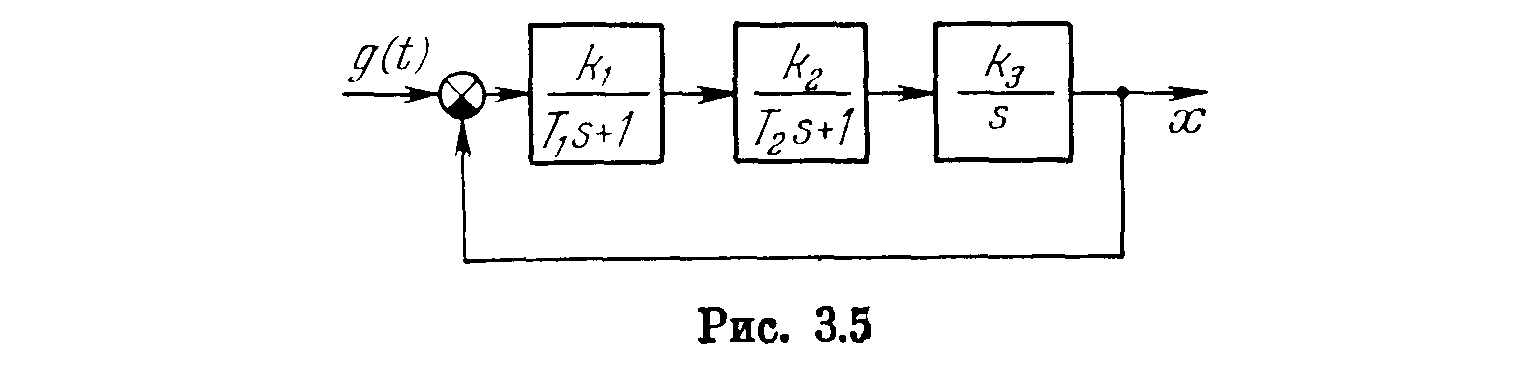
Пример. Для системы с астатизмом первого порядка, схема которой дана на рис. 3.5, имеем
![]()
Следовательно,
![]()
Разделив числитель на знаменатель, получаем
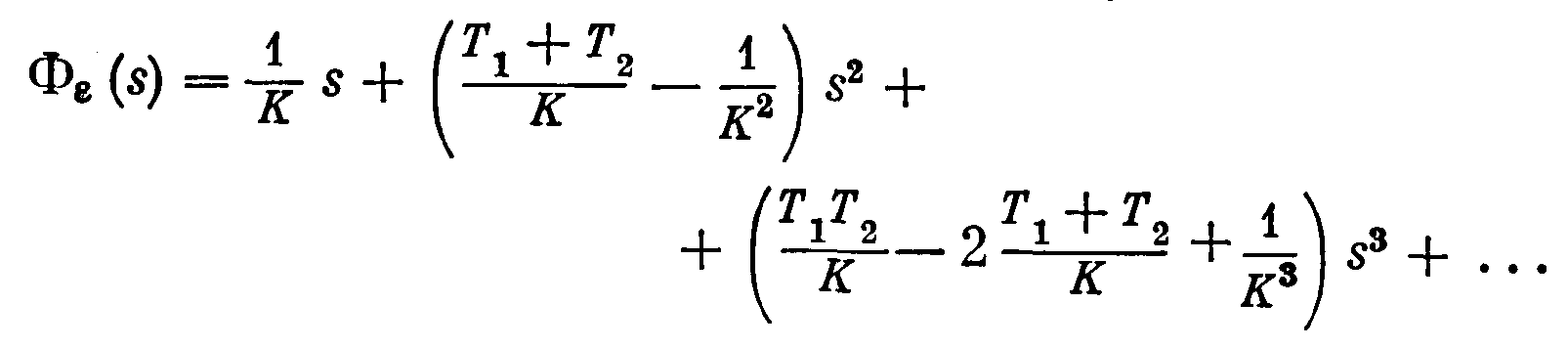
Отсюда, сравнивая с (3.31), находим коэффициенты ошибок

Поскольку коэффициент усиления К находится в знаменателе, а постоянные времени Т в числителе, можно сделать вывод о том, что все ошибки уменьшаются с увеличением К и с уменьшением постоянных времени, характеризующих инерционность системы.
Из приведенного примера видно, что коэффициент c0 соответствует статической, a c1 — скоростной ошибкам, которые рассматривались ранее в § 3.2.
Допустим, задающее воздействие имеет вид
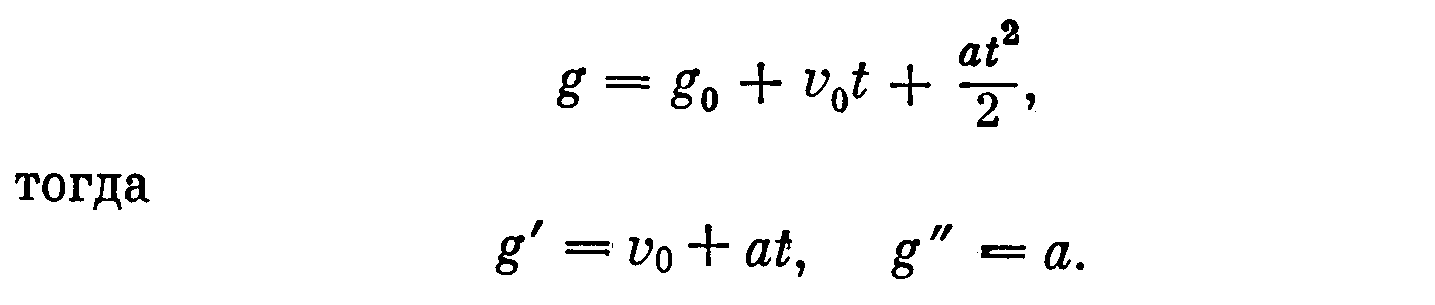
По формуле (3.27) с найденными коэффициентами получаем
![]()
Важно отметить, что при произвольном внешнем воздействии в формулах для ошибок общий коэффициент усиления разомкнутой цепи К (добротность) влечет за собой уменьшение всех видов установившихся ошибок замкнутой системы. Это главный фактор повышения точности замкнутой системы автоматического управления.
Необходимо заметить, что вычисление установившихся ошибок по указанным формулам имеет практический смысл при достаточно медленном изменении внешнего воздействия. Иначе эта ошибка не будет реальной из-за наличия значительной переходной составляющей процесса.
Отметим также, что выше определялись коэффициенты ошибок по задающему воздействию. Аналогично это можно сделать и по возмущающим воздействиям, привлекая соответствующие передаточные функции.