

10.6.3 Розрахунок фнч
Вихідні дані для розрахунку:
АЧХ ФНЧ повинна бути монотонною в смузі пропускання і смузі затримки.
Коефіцієнт підсилення К=1.
Частота зрізу fз=10Гц.
Максимальне загасання в смузі пропускання
 1=3дБ.
1=3дБ.Мінімальне загасання в смузі затримування
 2=20дБ.
2=20дБ.Ширина перехідної області Тwнч = 10Гц.
Ці дані були введені в програму розрахунку фільтра, яка визначила, що заданим значенням задовольняє фільтр Баттерворта 4-го порядку. Його принципова схема показана на рисунку 10.55 і включає дві ланки 2-го порядку, які реалізовані на ІМС ОП: DA1,DA2.
Р озрахунковий
порядок фільтра = 4.
озрахунковий
порядок фільтра = 4.
Добротність: ланка1 = 0.541196, ланка2 = 1.306563
Значення елементів :
ланка1: R1 =34,8кОм; R2 = 34,8кОм; R3 = 1,74 кОм ;
С1 = 422нФ; С2 = 1мкФ;
ланка2: R4 = 82,5кОм; R5 = 82,5кОм; R6 = 41,2кОм ;C3 = 73,2нФ;
C4 = 1 мкФ.
На рисунку 10.56 наведені характеристики: окремих ланок ФНЧ; АЧХ ідеального ФНЧ, що відповідає розрахунковим значенням його компонентів без їхнього округлення; АЧХ реального ФНЧ, що відповідає реальним значенням компонентів схеми, отриманим після їхнього округлення до конкретного стандартного ряду електронних елементів Е96.


10.7 Розробка схеми алгоритму і керуючої програми
Невід'ємною частиною будь-якої мікропроцесорної системи є керуюча програма, що забезпечує виконання системою заданих функцій.
На рисунку 10.57 наведена схема алгоритму роботи ЛМПСУ, структура якої показана на рисунку 10.1.
|
|
|
Рисунок 10.57 – Схема алгоритму роботи ЛМПСУ |
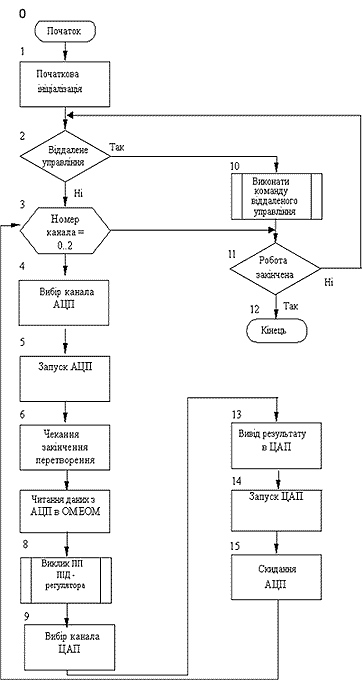
Потім обробляється перший (індекс 0) канал триканальної системи збору, обробки інформації і керування. Це відбувається в тому випадку, якщо відсутнє переривання від встановлення прапорця RI=1 веденої ОМЕОМ (вхідний буфер приймача послідовного каналу повний). RI=0 відбиває відсутність необхідності віддаленого керування, що полягає в одержанні веденою ОМЕОМ команди від мікроЕОМ більш високої ступені ієрархії. Значення контрольованого параметру 1-го каналу (у нашому випадку – витрата газу) через аналоговий мультиплексор і пристрій вибірки-зберігання, вбудовані в мікросхему MAX154, надійде на вхід АЦП цієї мікросхеми.
Потім формується сигнал запуску АЦП, очікується закінчення перетворення і після його завершення інформація про поточне значення контрольованого параметру вводиться в ОМЕОМ. Тут це значення порівнюється з заданим, у результаті чого виробляється сигнал непогодження, що надходить на цифровий ПІД-регулятор, реалізований програмно, і призначений для забезпечення необхідної якості процесу керування.
З
виходу регулятора знімається керуючий
вплив, що через паралельний
порт ОМЕОМ виводиться сигналом
![]() - запис у попередньо обраний регістр –
клямку
чотирьохканального
ЦАП MAX506.
- запис у попередньо обраний регістр –
клямку
чотирьохканального
ЦАП MAX506.
Цифрове значення, збережене в регістрі, безпосередньо цифро-аналоговим перетворювачем, який виконаний на матриці R-2R і операційному підсилювачі, перетворюється в аналогову величину – напругу, яка видається на відповідний виконавчий елемент.
Після завершення обробки першого каналу формується сигнал скидання для АЦП і аналогічно обробляються другий канал – виміру тиску, а потім, третій – виміру температури.
Якщо після цього робота системи не завершена, то керування знову передається обробці 1-го каналу і т.д.
Якщо перед черговим циклом обробки з'являється сигнал необхідності віддаленого управління, то основна програма переривається і керування передається підпрограмі, що здійснює взаємодію з мікро ЕОМ більш високого рівня.
Робоча керуюча програма, що реалізує даний алгоритм мовою Ассемблер ОМЕОМ МК51 приведена в таблиці 10.7.
Таблиця 10.7 – Робоча керуюча програма
|
Блок |
Мітка |
Команда |
Коментар |
|
1 |
|
SETB P2.6 |
Подача високого рівня на WR |
|
2 |
MAIN: |
JB P3.2, REMCONTROL |
Перехід до підпрограми віддаленого керування при наявності сигналу ВУ |
|
3 |
|
MOV R0, 0 |
Установка початкового каналу контролю |
|
4 |
LOOP: |
MOV A, P2 AND A, #11111100b OR A, R0 MOV P2, A |
Читання інформації з порту P2 Маскування бітів номера каналу АЦП Запис номера каналу Вивід номера каналу в порт P2 |
|
5 |
|
CLR P2.2 |
Подача низького рівня на CS, RD |
|
6 |
|
NOP NOP |
Затримка для закінчення перетворення АЦП |
Продовження таблиці 10.7
|
7 |
|
MOV A, P1 |
Читання даних з АЦП |
|
8 |
|
ACALL REG_PROC MOV R1, A |
Виклик підпрограми ПІД – регулятора. ПП повертає результат в акумуляторі |
|
9 |
|
MOV A, R0 MOV C, ACC.0 MOV P2.4, C MOV C, ACC.1 MOV P2.5, C SJMP CONTINUE: |
Завантаження номера каналу в акумулятор Побітовий вивід номера каналу в ЦАП
|
|
10 |
REMCONTROL: |
|
Виконання команди віддаленого керування |
|
11 |
CHECKEXIT: |
JNB P3.5, MAIN |
Перехід до початку програми |
|
12 |
|
RET |
Вихід із програми |
|
13 |
CONTINUE: |
MOV A, R1 MOV P0, A |
Завантаження сигналу керування в акумулятор Вивід сигналу керування в ЦАП |
|
14 |
|
CLR P2.6 SETB P2.6 |
Подача переходу 0->1 на ЦАП (запуск) |
|
15 |
|
SETB P2.2 |
Подача високого рівня на CS, RD |
|
3 |
|
INC R0 CJNE A, #3, LOOP SJMP CHECKEXIT |
Перехід до наступного каналу Виконати для 0..2 канали Перехід до наступної ітерації |
На рисунку 10.58 зображена схема електрична принципова ЛМПСУ, що реалізує задачу, яка описана вище.
