

9.2.2.4 Послідовно-паралельні і паралельно-послідовні регістри
Ці пристрої виконуються на основі послідовного регістру, доповненого відповідною логікою, і призначені для перетворення послідовного коду в паралельний і навпаки.
В послідовно-паралельний регістр інформація записується в послідовному багаторозрядному коді, а потім паралельно зчитується з усіх розрядів сигналом управління.
У паралельно-послідовний регістр дані записуються паралельно в усі розряди, а зчитування інформації здійснюється у послідовній формі розряд за розрядом.
9.2.2.5 Регістри у інтегральному виконанні
В сучасних серіях ІМС широко подані різноманітні регістри. Роздивимося як приклад один із них - К555ИР1, який є 4 - розрядним універсальним регістром (рисунок 9.49,а,б). Ця мікросхема містить чотири тактовані перепадом з 1 в 0 D-тригери, з`єднані послідовно за допомогою елементів І-АБО. Якщо на вхід V регістра подано сигнал “нуль”, то вихід кожного попереднього тригера через елемент І-АБО з'єднується з входом D наступного. При цьому імпульси, що приходять на тактовий вхід С2, будуть щоразу встановлювати наступний тригер в стан, у якому до цього знаходився попередній. Вхід I регістра, пов'язаний із входом D першого тригера, служить для прийому інформації в послідовному коді. Перед надходженням чергового тактового імпульсу на вхід I повинне подаватись нове значення вхідного двійкового розряду. Після прийому чотирьох біт послідовного коду відповідний йому паралельний код може бути отриманим з виходів тригерів Q1...Q4 .
Запис до регістру інформації в паралельній формі відбувається з входів D1...D4 за подачею тактового імпульсу на вхід С1 і значенні управляючого сигналу V=1. Встановлюючи V=0 і подаючи тактові імпульси на вход С2, можна виконати зсув записаного коду. При цьому з виходу Q4 знімається послідовний двійковий код.
Розглянуті регістри можуть використовуватись для зсуву інформації як вправо, так і вліво (як реверсивні). Для цього необхідно попарно з’єднати виводи Q4 и D3 , Q3 и D2 , Q2 и D1 (рисунок 9.49,в). Вхід V в цьому випадку грає роль перемикача направлення зсуву. При V=0 і надходженні сигналів синхронізації на вхід С2 послідовний код подається на вхід I і виконується зсув вправо. Якщо V=1, а послідовний код надходить на вхід D4, то синхросигналами на вході С1 виконується зсув коду вліво.



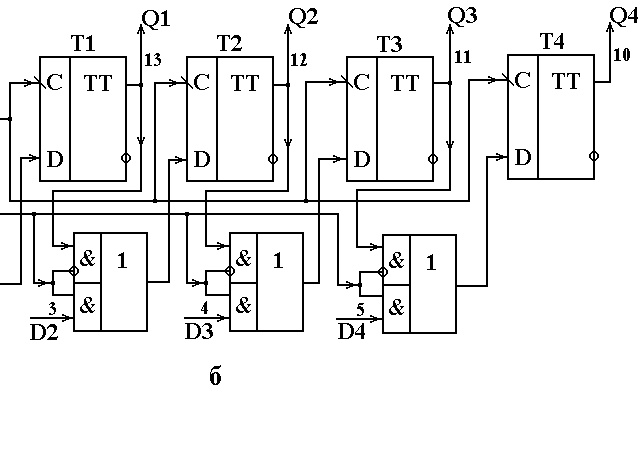
Рисунок 9.49
9.2.3 Лічильники
Це ПЦП, призначені для лічення імпульсів, які надходять на їх вхід. У паузах між імпульсами лічильник зберігає в двійковому коді інформацію про кількість імпульсів , що вже надійшли. Максимальне число, що може бути записане в лічильнику, дорівнює (2n-1), де n - число розрядів лічильника. Кожний розряд включає тригер. Найбільш просто лічильники будуються на тригерах з входом, що лічить ( Т-тригерах).
Проте для їх побудови можуть застосовуватися не тільки Т-тригери, але також і D- та JK-тригери.
Основним параметром лічильника є коефіцієнт лічення Кліч, обумовлений максимальною кількістю одиничних сигналів, що можуть бути полічені. N-розрядний двійковий лічильник може знаходитися в станах 0, 1, 2, ... , ( 2n-1 ). При надходженні на вхід лічильника 2n-ї одиниці він переходить з стану ( 2n-1 ) в стан 0. Отже, його модуль лічення Кліч=2n. Тобто в залежності від кількості розрядів такий лічильник може порахувати 2, 4, 8, 16, ... одиниць і сформувати на виході сигнал перенесення. Проте в ряді випадків потрібно, щоб коефіцієнт лічення відрізнявся від 2n. Широке поширення отримали, наприклад, десяткові лічильники, для яких Кліч=10. Такий лічильник після кожного 10-го імпульсу повертається у початковий стан, формуючи при цьому на виході імпульс перенесення. Кількість розрядів (n) лічильника з довільним коефіцієнтом лічення визначається з умови
2(n-1) < Кліч < 2n . ( 9.20 )
Очевидно, що для Кліч=10 необхідна кількість розрядів n=4. Звичайний двійковий чотирирозрядний лічильник має 24=16 різноманітних стійких станів. Отже, для Кліч=10 є N=16-10=6 зайвих станів, які необхідно виключити.
Крім значення коефіцієнта лічення лічильники можна класифікувати ще за рядом ознак.
В залежності від напрямку лічення розрізняють:
лічильники, що підсумовують (лічення відбувається у
прямому напрямку);
лічильники, що віднімають (лічення відбувається у
зворотному напрямку),
реверсивні лічильники (з прямим і зворотним ліченням).
За способом організації схеми перенесення розрізняють лічильники з:
послідовним ,
паралельним (наскрізним),
паралельно-послідовним перенесенням.
В залежності від особливостей переключення окремих тригерів лічильники поділяються на:
асинхронні,
синхронні .