

Технические характеристики магниторезисторов
-
Параметр
Материал для изготовления
InSb
InAs
Сопротивление, Ом:
при отсутствии магнитного поля
в магнитном поле RВ при В=1 Тл
0,5…200
50…4000
0,5…200
1…400
Относительное изменение сопротивления при В, Тл:
0,1
0,5
1,0
0,2…0,5
5…8
10…16
0,03…0,5
0,5…1,0
2…3
Габаритные размеры, мм:
наименьшие
наибольшие
5х3х0,2
8х6х0,5
5х3х0,2
8х6х0,5
Приращение удельного электрического сопротивления ∆ρ магниторезистора равно:
![]()
где А — коэффициент пропорциональности. В малых полях зависимость А от Б квадратичная. Размеры магниторезистора типа МД-130 фирмы «Сони» равны 0,4х0,6 мм, а чувствительность 2 мВ/(А/см).
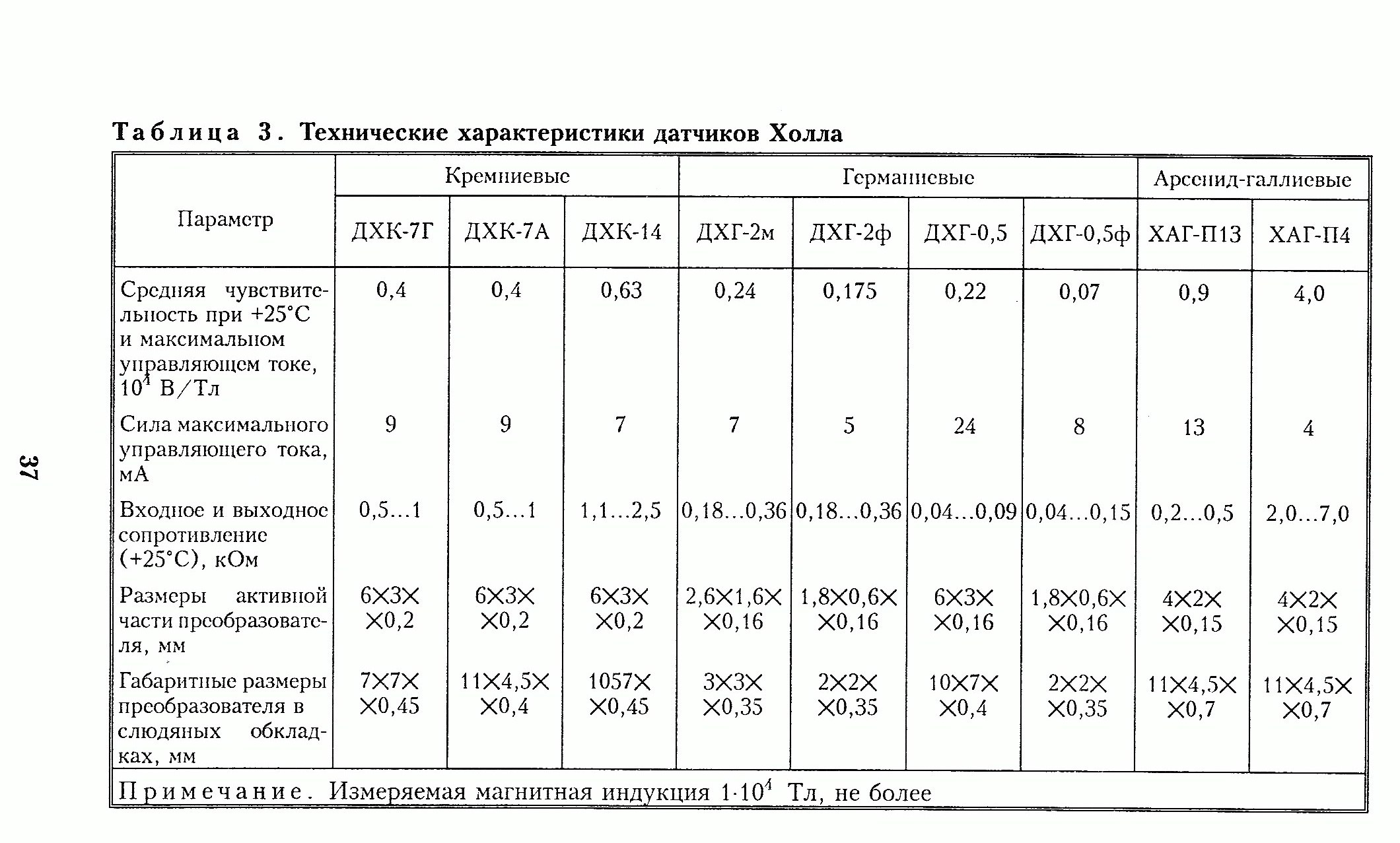
Коэффициент передачи преобразователей Холла (табл. 3) при полях с индукцией меньше 0,1 Тл изменяется по квадратичному закону, а в области больше 1,0 Тл он несколько увеличивается. Магниторезисторы имеют более высокий коэффициент передачи в полях с индукцией выше 0,2 Тл, поэтому ими следует пользоваться при измерении силовых магнитных полей.
Магнитные порошки по составу, физическим свойствам и назначению подразделяются на четыре вида:
железные порошки, получаемые термическим разложением пентакарбонида железа Fe(Co)5 или диспергированием железа электрической дугой в керосине;
порошки, получаемые в шаровых мельницах измельчением окалины, возникающей при горячей обработке стали;
порошки технического и синтетического магнетика;
порошки ферромагнитной окиси железа, получаемые окислением магнетика.
Наибольшее распространение получили черный магнитный порошок, представляющий собой измельченную окись-закись железа Fe3O4 и буровато-красный порошок — γ-окись железа (γ-Fe2O3).
Для контроля деталей с темной поверхностью используют светлые порошки (с добавлением алюминиевой пудры ПАК-3), либо люминесцентные магнитные порошки. Распространенный люминесцетиый магнитный порошок в 100 г Fe2O3 содержит 15 г люминофора-люмогена светложелтого цвета.
Таблица 3. Технические характеристики датчиков Холла
Люминесцетные порошки используют при контроля как по темным, так и по светлым поверхностям, но при этом место контроля должно быть оборудовано ультрафиолетовым освещением.
Большое значение имеет размер частиц порошка. Средний размер одного зерна 0,1...60 мкм. Магнитные пасты, предназначенные для разведения в жидкости, кроме порошков содержат различные смачивающие, антикоррозионные и другие присадки.
Для улучшения условий осаждения порошка над дефектом применяют водные и масляные магнитные суспензии. Наиболее распространенные составы водных магнитных суспензий (в граммах):
-
1. Черный магнитный порошок
или люминесцентный магнитный порошок
25±5
4±1
Хромпик калиевый (К2СrО7)
4±1
Сода кальцинированная
10±1
Эмульгатор ОП-7 или ОП-10
5±1
Вода
1л
2. Черный магнитный порошок
или люминесцентный магнитный порошок
25+5
4+1
Нитрит натрия (химически чистый)
15±1
Эмульгатор ОП-7 или ОП-10
5±1
Вода
1л
3.Черный магнитный порошок
или люминесцентный магнитный порошок
25+5
4±1
Мыло хозяйственное
1±0,5
Сода кальцинированная
12±2
Вода
1
Применяют масляные и керосино-масляные суспензии следующих составов:
1. Черный магнитный порошок, г
или люминесцентный магнитный порошок, г
25+5
4±1
Масло РМ, л
1
Стабилизирующая присадка Акор-1,
% от массы порошка
0,5...5
2. Черный магнитный порошок, г
25+5
Масло трансформаторное, л
0,5
Керосин, л
0,5
Стабилизирующая присадка Акор-1,
% от массы порошка
0,5...5
В зависимости от объекта контроля применяют суспензии с концентрацией порошков, начиная с 5 г/л и выше. Низкие концентрации используют при контроле резьбы, деталей со структурной полосчатостью и т.п.
Магнитные ленты применяют для записи магнитных нолей, в том числе и при магнитографической дефектоскопии. Двухслойные ленты состоят из ацетилцеллюлозы, ноливинилхлорида, лавсана и магнитоактивного слоя — порошков окиси железа, взвешенного в лаке, обеспечивающего хорошую адгезию с основой. Для изготовления рабочего слоя используют гамма-оксиды железа (γ-Fe2O3), железо-кобальтовый феррит (CoFe203), двуокись хрома (СrО2). В однослойных лентах магнитный порошок вводится непосредственно в основу (резина, полиамидные смолы).
Лента МКУ создана специально для контроля сварных соединений и содержит два рабочих слоя с различной коэрцитивной силой, что позволяет работать и в средних, и в больших намагничивающих полях. Эти ленты успешно применялись при магнитографии строящихся нефте-газопроводных магистралей, при автоматизации наблюдений за развивающимися усталостными трещинами при циклических испытаниях образцов сварных соединений и т.п. Недостатком магнитографии является многократное преобразование информации и реакция только на тангенциалыгую составляющую поля.
Для автоматизации индентификации поверхностных дефектов на ферромагнитных деталях были созданы [2] автоматы на основе магнитоакустических преобразователей.
Если
сила электрического тока в обмотке
возбуждения изменяется
по синусоидальному закону, то ЭДС,
наводимую в измерительной катушке,
которая находится над дефектом,
определяют по формуле
![]()
где w — число витков в катушке; S — сечение катушки; Нт — максимальная напряженность магнитного поля; ω — круговая частота. Для повышения чувствительности параллельно измерительной катушке включают конденсатор. Образуется резонансный контур, который настраивают на определенную частоту. Для измерения постоянных магнитных полей цепь измерительной катушки должна периодически размыкаться. Этот метод не нашел широкого применения в дефектоскопии. Эффективным оказался магнитоакустический метод (рис. 20), при котором измерительная катушка наклеивается на пластину из ферромагнетика с сильно развитым магнитострикционным эффектом [2].

Рис. 20. Магнитоакустический датчик: 1 — излучатель колебаний; 2 — ферромагнитная пластина с развитым магнитострикционным эффектом; 3 — измерительная катушка; 4 — контролируемая деталь с дефектом.
В пластине возбуждаются колебания, которые передаются наклеенной на нее измерительной катушке. Наводимая ЭДС имеет частоту указанных колебаний и пропорциональна постоянному магнитному полю дефекта, которое подмагничивает пластину. На рис. 20 показан один из вариантов магнитоакустического датчика. Этот метод удобен для автоматизации процесса обнаружения относительно поверхностных дефектов. Измерение происходит в зоне локального насыщения пластины с развитым магнитострикционным эффектом, который сильно изменяется от степени подмагничивания.
Колебания структуры пластины создает пьезопреобразователь, подключенный к обычному УЗ-дефектоскопу. ЭДС, наводимая в катушке 3, зависит от поля рассеяния дефекта.
Таким образом информация о результатах магнитного контроля принимается и анализируется с помощью ультразвукового дефектоскопа.
Все магнитные преобразователи могут быть разделены на две категории: полемерные и градиентометрические, в которых измеряемый сигнал равен:
![]()
![]()
В свою очередь полемерные подразделяются на модульные и компонентные. Модульные полемерные преобразователи позволяют вести измерения независимо от ориентации магнитного поля, так как:
![]()
Для компонентных преобразователей возможны измерения по каждой координате:
![]()
![]()
![]()
Если ось преобразователя направлена к соответствующей оси поля (например, ОХ) под углом α, то сигнал будет меньше:
Uх = f(Hcosα) и т.д.
Модульные полемерные преобразователи позволяют измерять магнитную индукцию в воздухе, или, что практически то же самое, напряженность Н = B/μO магнитного ноля независимо от направления. Таким образом, выходной сигнал модульного преобразователя не зависит от ориентации последнего в пространстве.
Для
компонентных преобразователей существуют
три передаточные функции:
![]()
![]()
![]()
Выходной сигнал такого преобразователя определяется одним из компонентов напряженности. И если вектор напряженности направлен под некоторым углом а к соответствующему направлению, то выходной сигнал U = f(Hcosa). Отсюда вытекает понятие диаграммы направленности компонентного магнитного преобразователя. Если такой преобразователь помещен в плоскопараллельное магнитное поле, то поворачиваясь вокруг оси, ортогональной вектору напряженности магнитного поля, он описывает окружность.
Градиентометрические преобразователи позволяют оценивать неоднородность магнитных полей по значению соответствующей производной. Две разновидности таких преобразователей — продольные и поперечные — позволяют оценивать скорость изменения одного из компонентов вектора магнитной индукции в ортогональных направлениях.
Каждый из этих преобразователей (индукционные, феррозондовые, гальваномагнитные, магниторезистивные, магнитооптические, магнитные ленты и магнитные порошки) находится в зоне поля рассеяния дефекта отдельных его компонентов.
В основу принципа действия индукционных преобразователей положен закон электромагнитной индукции, согласно которому ЭДС, наведенная в замкнутом контуре L, пропорциональна изменению во времени магнитного потока.
Можно показать, что в том случае, когда размеры контура L, охватывающего площадь S, остаются неизменными и он не изменяет положения относительно вектора В, появляется так называемая трансформаторная ЭДС:
![]()
возникающая только за счет изменения индукции во времени, т.е. в случае переменных полей.
Если же магнитная индукция постоянна, то изменить магнитный поток во времени можно, поворачивая контур вокруг оси, перпендикулярной вектору В. При этом возникает так называемая ЭДС движения:
![]()
Преобразователи, использующие трансформаторную ЭДС Етр , называют пассивными, и они могут применяться только в переменных магнитных полях. Магнитные преобразователи, использующие ЭДС движения Едв, называют активными, они могут использоваться для измерения постоянных магнитных полей.
Пассивные индукционные преобразователи в простейшем случае представляют катушку. Это, как правило, короткие однослойные катушки, намотанные тонким проводом, чтобы можно было пренебречь толщиной намотки по сравнению с диаметром катушки.
В том случае, когда ось катушки в процессе измерений составляет с направлением вектора магнитной индукции угол α, мгновенная трансформаторная ЭДС будет:
![]()
где S
— площадь
одного витка катушки; w
— число
ее витков. При
измерении в слабых полях может оказаться,
что ЭДС
весьма мала. Тогда для ее увеличения
помещают внутри
катушки ферромагнитный сердечник и
магнитная индукция
в сердечнике увеличится в
![]() ,
,
где
![]() — магнитная
проницаемость тела; Nр
— коэффициент
размагничивания, определяемый
геометрическими параметрами
сердечника. В литературе приводится
следующее
выражение для магнитной проницаемости
цилиндрического
сердечника длиной l
и диаметром d:
— магнитная
проницаемость тела; Nр
— коэффициент
размагничивания, определяемый
геометрическими параметрами
сердечника. В литературе приводится
следующее
выражение для магнитной проницаемости
цилиндрического
сердечника длиной l
и диаметром d:
![]()
![]()
Выходной сигнал пассивного преобразователя с сердечником:
![]()
Коэффициент преобразования, равный множителю перед производной dH/dt, зависит от Np, т.е. в конечном счете от размеров и формы сердечника.
Кроме однокатушечных пассивных магнитных преобразователей для оценки изменений магнитной индукции в пространстве применяют двухкатушечные дифференциальные преобразователи. При встречном включении катушек выходной сигнал такого преобразователя:
![]()
Хотя преобразователи и одинаковые, но напряженность поля в области, где размещен каждый из них, может быть различной.
Существует
два основных типа активных индукционных
преобразователей (рис. 21). В одном из них
ЭДС возникает за счет изменения скалярного
произведения
![]() ,
т.е.
практически за счет изменения площади
S,
а
в другом — за счет изменения магнитной
проницаемости μт.
,
т.е.
практически за счет изменения площади
S,
а
в другом — за счет изменения магнитной
проницаемости μт.
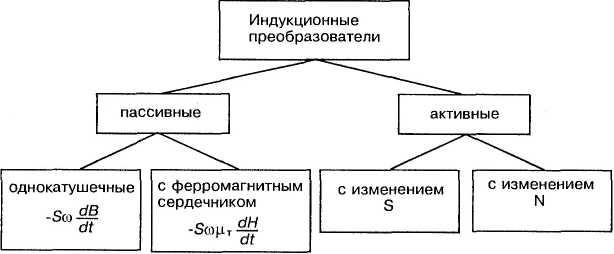
Рис. 21. Классификация индукционных преобразователей.
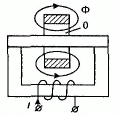
Простейшим примером первого типа преобразователя является катушка (рис. 22), вращающаяся с помощью двигателя. При угловой частоте ω напряжение, снимаемое со скользящих контактов, равно:
![]()
Отсюда видно, что чувствительность можно повысить, увеличивая частоту вращения. Если измеряется только модуль выходного напряжения, то преобразователь является модульным.

Рис. 22. Измерение поля рассеяния с помощью вращающейся катушки (а) и измерительного трансформатора (б).
Электрические шумы, возникающие в скользящих контактах, можно устранить, применяя для снятия выходного сигнала трансформатор (см. рис. 22). Первичная обмотка трансформатора закреплена на валу индукционного преобразователя и вращается вместе с ним, а вторая неподвижна. Такие преобразователи позволяют проводить измерения в слабых магнитных полях (порядка 10-4 Тл) при погрешности не более единиц процентов.
Во втором типе активных индукционых преобразователей изменяется магнитное сопротивление за счет изменения положения ферромагнитного сердечника.
Обычно подвижна средняя часть сердечника, которая может вращаться вокруг поперечной оси. В этом случае измеряется коэффициент размагничивания. В результате выходной сигнал изменяется дважды за один оборот сердечника. При измерении второй гармоники можно отфильтровать наводки, создаваемые двигателем на основной частоте.
Магнитная индукционная головка — это обычный пассивный индукционный преобразователь (рис. 23), представляющий собой кольцевой магнитопровод 1 с зазором 2. На магнитопроводе размещена катушка 3. Контроль осуществляется путем перемещения магнитопровода вблизи объекта контроля 4, причем участок зазора соприкасается с поверхностью предварительно намагниченной детали.

Рис. 23. Магнитная индукционная головка.
Магнитный поток Фr, встречая трещину 5, частично огибает ее, а частично проходит по магнитопроводу. Часть этого потока Фраб проходит через сердечник и может создавать ЭДС в катушке, другая же часть создает поток рассеяния Фраб. Магнитная головка применяется как для считывания информации с магнитных лент, так и для непосредственных измерений на поверхности детали (см. рис. 23). Эффективность магнитной головки может быть оценена соотношением рабочего потока и потока рассеяния:
![]()
где lз — средняя длина магнитных силовых линий в зазоре; Sз — средняя площадь сечения, сквозь которое проходят эти линии; lс и Sc — длина и площадь сечения магнитопровода; μc — относительная магнитная проницаемость материала сердечника.
Для повышения эффективности магнитных головок сердечник изготовляют из материала с большой магнитной проницаемостью, например, из пермаллоя или феррита.
Выходной сигнал магнитной головки определяется градиентом магнитного поля вблизи зазора и скоростью перемещения головки. Это следует непосредственно из закона электромагнитной индукции. Применение магнитных индукционных головок эффективно при постоянной скорости перемещения. При изменении скорости изменяются коэффициент преобразования головки и спектр сигнала, что затрудняет ее применение.
При магнитографии, когда отпечаток магнитного рельефа вначале записывается на магнитную лешу, а затем считывается, скорость движения должна быть строго постоянна.
Действие феррозондового преобразователя основано на нелинейности кривых намагничивания сердечников. В зависимости от взаимной ориентации векторов напряженности внешнего магнитного поля и магнитного поля возбуждения преобразователя различают феррозонды с продольным и поперечным возбуждением.
Феррозонд с продольным возбуждением состоит из двух идентичных полузондов, каждый из которых содержит сердечник из магнитомягкого материала с размещенными на нем двумя катушками. Одна катушка — возбуждающая — подключается к источнику переменного тока, другая — измерительная. Схема подключения обмоток в феррозонде-полемере показана на рис. 24. Здесь обмотки возбуждения соединены встречно, измерительные — согласно. Синусоидальный ток возбуждения iВ = Imsinωt создает в сердечнике магнитное поле возбуждения HB(t) = Hmsinωt, вектор напряженности которого параллелен оси сердечника. Без внешнего поля очевидно, что характер изменения индукции в каждом сердечнике одинаков и значения индукций отличаются только знаком. Следовательно, выходной сигнал, равный сумме ЭДС в измерительных катушках, равен нулю.

Рис. 24. Схема соединения обмоток феррозонда-полемера.
При воздействии постоянного магнитного поля H0 напряженность в первом сердечнике H1(t) = HBsinωt + Н0 а во втором H2(t) = HBsinωt + Н0. В этом случае вследствие нелинейности кривой намагничивания значения индукции в стержнях становятся различными. Выходной сигнал несинусоидальной формы имеет период Ти вдвое меньше периода Тв возбуждающего тока. Это означает, что постоянное внешнее подмагничивающее поле H0 обусловливает появление второй гармоники в выходном сигнале феррозонда. Эта вторая гармоника и является информативной, по ней судят о напряженности постоянного магнитного поля. При H0 = 0 выходной сигнал феррозонда равен нулю. Рабочая часть характеристики этого преобразователя близка к линейной. Действующее значение второй гармоники U2 пропорционально напряженности Н0.
Для оценки неоднородности постоянного во времени магнитного поля используется феррозонд-градиентометр, который по устройству аналогичен феррозонду-полемеру и отличается от него соединением обмотки (рис. 25).

Рис. 25. Схема соединения обмоток феррозонда-градиентометра.
Обмотки возбуждения соединены так, что в однородном поле, т.е. при Н0' = H0", напряженность, а следовательно, и индукция в каждом сердечнике одинаковы в любой момент времени. Измерительные катушки wи' и wи" включены встречно, поэтому выходное напряжение этого феррозонда, равное разности ЭДС е1 и е2 в измерительных катушках, равно нулю. Если же напряженность поля изменяется в направлении, ортогональном направлению вектора H0, то напряженность магнитного поля Н0' не равна Н0". Это приводит к тому, что индукция в каждом сердечнике не будет одинаковой и появится выходной сигнал Uвых = e1(t) - e2(t). Амплитуда выходного сигнала пропорциональна степени неоднородности внешнего поля, т.е. величине ∆Н = Н0' – Н0".
Магнитодоменпый преобразователь представляет собой однородную магнитную среду определенной толщины, в которой домены (однородные области, обладающие одинаковой намагниченностью), ориентируются в зависимости от магнитного поля рассеяния, создаваемого дефектами в изделиях из ферромагнитных материалов. Действие преобразователя основано на магнитооптическом эффекте [32].
Применяемые в настоящее время магнитодоменные преобразователи основаны на визуализации топографии магнитного поля с помощью феррит-гранатовой магнитной пленки. Нa рис. 26 показана доменная структура такой пленки, размещенной на бездефектном участке ферромагнитного объекта, а на рис. 27 — доменные структуры пленки, находящейся над дефектом типа «трещина».

Рис. 26. Магнитодоменная структура Рис. 27. Магнитодоменная структура
на бездефектном участке детали. размещенной на участке детали c трещиной.
Изменение доменной структуры происходит под влиянием магнитных полей рассеяния. Оценка этих изменений производится так, как показано на рис. 28.

Рис. 28. Измерительная установка с магнитодоменным преобразователем.
Здесь световой поток от источника света 1 проходит через поляризатор 2 и с помощью полупрозрачного зеркала 3 освещает магнитную пленку 4 плоскополяризованным светом. При прохождении плоскополяризованного света через магнитную пленку направление поворота поляризации света зависит от направления намагниченности пленки. Пройдя через пленку и отразившись от зеркального покрытия 5, световой поток вторично проходит через нее, что приводит к удвоению угла поворота плоскости поляризации.
После этого через полупрозрачное зеркало 3 свет попадает на анализатор 6,
изображение на выходе которого зависит от плоскости поляризации света и, следовательно, определяется доменной структурой. Доменная структура определяется свойствами ферромагнитного образца 7 и, кроме того, может изменяться с помощью электромагнита 8.
Устройство магнитодоменного преобразователя иллюстрирует рис. 29.

Рис. 29. Магнитный преобразователь.

Рис. 30. Схема (а) магнитооптического [35] визуализатора (б), его использования (в) для обнаружения мелких трещин (г).
Основным элементом преобразователя является висмутсодержащая феррит-гранатовая магнитная пленка 1, выращенная на подложке 2 из галлий-гадолиниевого граната. На пленку нанесен отражающий слой 3, закрытый предохраняющим слоем 4. Для управления доменной структурой служит катушка 5, по которой может быть пропущен ток.
Информативным параметром магнитодоменного преобразователя является видимое изображение доменной структуры магниточуствительной пленки. Под влиянием внешнего подмагничивающего поля доменная структура пленки изменяется. Междоменные границы занимают положение, соответствующее минимуму магнитной энергии пленки.
На работу магнитодоменного преобразователя влияют два основных фактора: параметры пленки и положение доменных границ в зависимости от напряженности поля подмагничивания.
Чувствительность используемых пленок составляет 10 А/см и определяется коэрцитивной силой доменных границ, характеризующейся напряженностью магнитного поля, при которой доменная граница начинает изменяться. Наряду с магнитными важную роль играет оптическая характеристика пленки — магнитооптическая добротность Ψ.
В дефектоскопии используют висмутсодержащие феррит-гранатовые эпитаксимальные пленки с низкой коэрцитивной силой и намагниченностью насыщения Ms = 1... 12 мТл. Толщина пленки 6 мкм, магнитооптическая добротность более 40°, ширина доменной структуры 10 мкм.
Для регистрации магнитных полей рассеяния от дефектов используются различные типы рассмотренных выше преобразователей, однако наибольшее применение нашли магнитные порошки, обеспечивающие достаточно высокую чувствительность, если чистота обработки поверхности соответствует 6...7-му классу шероховатости.
На рис. 30 показано применение магнитооптических приборов в авиации [34].
Способы намагничивания
Существует большое число схем циркулярного, полюсного и комбинированного намагничиваний. Некоторые из таких схем по ГОСТ 21105-87 приведены в табл. 4.
Как тип преобразователя, так и вид намагничивания определяют возможности магнитного контроля.
Таблица 4. Принципиальные схемы намагничивания
|
Намагничивание |
Способ |
Схема |
|
1 |
2 |
3 |
|
Циркулярное |
Пропусканием тока по всему объекту |
|
|
Пропусканием тока по части детали |
| |
|
Пропусканием тока по проводнику, помещенному в сквозное отверстие в объекте |
|



Продолжение таблицы 4.
-
1
2
3
Циркулярное
Путем индуцирования тока в детали
Пропусканием тока по тороидальной обмотке, напитой на деталь

По участкам детали

Возбуждением тока в детали

Продольное (полюсное)
При помощи постоянного магнита

При помощи электромагнита

При помощи соленоида

Перемещением постоянного магнита по объекту
Окончание таблицы 4.
|
1 |
2 |
3 |
|
Комбинированное
|
Пропусканием тока по объекту и при помощи магнита |
|
|
Пропусканием по объекту двух токов во взаимно перпендикулярных направлениях |
| |
|
Индуктированием и пропусканием тока по проводнику, помещенному в сквозное отверстие в объекте |
| |
|
Во вращающемся магнитном поле |
При помощи соленоида вращающегося магнитного поля |
|
|
Примечание. Обозначения: О — объект контроля; Ф — магнитный поток; I — электрический ток. | ||




Для намагничивания деталей машин применяют постоянный, переменный, однополупериодный, выпрямленный и импульсный токи. Дефекты хорошо обнаруживаются в случае, когда направление намагничивания контролируемой детали перпендикулярно направлению дефекта. Поэтому простые детали намагничивают в двух взаимно перпендикулярных направлениях, а детали сложной формы — в нескольких направлениях.
Циркулярное намагничивание осуществляется при пропускании тока по контролируемой детали или через проводник, помещенный в ее отверстие. Наиболее эффективно циркулярное намагничивание деталей, имеющих форму тел вращения. Полюсное намагничивание осуществляется с помощью электромагнитов, постоянных магнитов или соленоидов. При этом обычно деталь легче намагничивается идоль своего наибольшего размера. На ее краях образуются полюсы, создающие поле обратного направления. Комбинированное намагничивание осуществляется при одновременном намагничивании детали двумя или несколькими изменяющимися магнитными полями. При этом можно пстретить любое сочетание видов тока.
Рассмотрим особенности наиболее распространенных пидов намагничивания.
Продольное (полюсное), циркулярное и комбинированное намагничивания отличаются преимущественным направлением магнитного потока относительно наибольшего размера объекта контроля. Продольное намагничивание можно осуществить с помощью постоянного магнита, электромагнита или соленоида (рис. 31).

Рис. 31. Варианты продольного намагничивания.
Продольное намагничивание в соленоиде используют при контроле протяженных объектов типа прутков, штанг. При этом сказывается влияние размагничивающего фактора (коэффициента формы). Истинная напряженность магнитного поля внутри объекта меньше расчетной. Влияние намагничиваемых областей детали и сложность конфигурации намагничиваемой области затрудняет расчет магнитного поля внутри детали. Для выбора режима намагничивания деталей сложной формы и определения чувствительности необходимо изменять напряженность намагничивающего поля. Область поля рассеяния окружена участками, где полей рассеяния практически нет. Большинство первичных измерительных преобразователей имеют относительно большие размеры, поэтому получается усредненное по их размерам значение напряженности, т. е. явно заниженные величины.
При продольном намагничивании выявляются поперечные, т.е. направленные ортогонально направлению магнитного потока дефекты. Очевидно, что при использовании постоянного магнита или электромагнита для продольного намагничивания контроль лучше всего проводить несколько раз, намагничивая участок детали в различных направлениях.
Циркулярное намагничивание осуществляют, пропуская ток через деталь или проводник, проходящий сквозь отверстие в контролируемой детали. Этот вид намагничивания применяют для выявления продольных дефектов, а также дефектов, расположенных под небольшим углом к оси детали. Основные разновидности циркулярного намагничивания показаны на рис. 32. Протяженные детали в виде стержней, осей, у которых рабочей является боковая поверхность, намагничивают, пропуская ток через контакты на торцах. Для циркулярного намагничивания участков длинных деталей, а также в случае недоступности использования торцов контакты устанавливают на боковую поверхность детали.

Рис. 32. Разновидности циркулярного намагничивания.
Недостатком этого способа является то, что в местах контактов возможен сильный разогрев детали и образование прижогов (областей термического воздействия с измененными механическими свойствами). При контроле деталей в виде труб, колец ток проходит по проводу, пропущенному через отверстие.
При циркулярном намагничивании можно приближенно оценить напряженность магнитного поля при пропускании по нему тока I. По закону полного тока:
H=I/2πr,
где r — радиус детали.
По этой же формуле можно провести расчет и для случая, когда расстояние l между контактами значительно больше диаметра детали d, т.е. при l/d > 5...10.
Обычно считают, что Н = I/2πrср, где rср — средний радиус детали.
В случае намагничивания пластин расчет менее точен, но можно полагать, что при соотношении сторон сечения более 10...15 напряженность магнитного поля на поверхности пластины определяется соотношением:
H = I/2b,
где b — большая сторона сечения пластины.
Комбинированное намагничивание осуществляется одновременным намагничиванием детали обычно переменными полями в двух взаимно перпендикулярных направлениях с целью выявления дефектов разной ориентации. Очевидно, что намагничивающие поля желательно иметь разной частоты. На рис. 33 показаны основные варианты комбинированного намагничивания.

Рис. 33. Некоторые варианты комбинированного намагничивания.

Рис. 34. Происхождение ложных Рис. 35. Способы уменьшения влияния
индикаций при продольном размагничивающегося фактора при
намагничивании разнотолщииных деталей. продольном намагничивании.
Для полей различных частот их взаимное влияние практически отсутствует, и каждое поле намагничивает объект только в своем направлении. В результате с максимальной чувствительностью можно выявлять дефекты, ориентированные в двух ортогональных направлениях. Дефекты промежуточных направлений будут также выявлены, но с меньшей чувствительностью. Поэтому с помощью комбинированного намагничивания выявляют дефекты, ориентированные произвольно.
При использовании индуцированного тока в детали, как, например, в третьем случае на рис. 33, возможно замыкание тока не через деталь, а через магнитопровод. Во избежание этого между деталью и магнитопроводом приходится устанавливать изоляционные прокладки.
Для получения достоверной информации надо уметь отделить ложные индикации. На рис. 34 показано происхождение ложного дефекта в зоне резкого изменения сечения детали. Надо понимать, что небольшую, короткую деталь в направлении поля намагнитить сложнее, чем протяженную (рис. 35) из-за влияния размагничивающего фактора. Однако есть технологические приемы (рис. 35), позволяющие уменьшить влияние этого явления.
Магнитные порошки на поверхности намагниченной детали
Сущность магнитопорошкового метода контроля можно пояснить на рис. 36, а. Здесь по центральному проводнику 2 проходящему через полую деталь 1, пропускается электрический ток I. Возникший магнитный поток замкнется по детали (рис. 36, а), в местах трещин он выходит за пределы детали, образуя неоднородное магнитное поле рассеяния 4 и местные магнитные полюсы N и S. Наибольшая плотность магнитных силовых линий поля рассеяния наблюдается непосредственно над трещиной и уменьшается с удалением от нее.
Для обнаружения несплошности на поверхность детали наносят магнитный порошок, взвешенный в воздухе (сухим способом) или в жидкости (мокрым способом). На частицу и поле рассеяния будут действовать силы: магнитного поля Fз, (рис. 36, б), направленная в область наибольшей плотности магнитных силовых линий, т.е. к месту расположения трещины; тяжести Fт; выталкивающего действия жидкости FA, трения Fтр, силы электростатического Fa и магнитного Рм взаимодействия, возникающие между частицами. В магнитном поле частицы намагничиваются и соединяются в цепочки 5 и 6. Под действием результирующей силы Fр частицы притягиваются к трещине и накапливаются над ней, образуя скопление порошка. Ширина валика из осевшего порошка значительно больше ширины раскрытия трещины. Порошок образует цепочки, которые взаимодействуют друг с другом.
При достаточно большом количестве частиц в цепочке можно пренебречь размагничивающим фактором отдельных частиц.
По причине меньшего размагничивающего фактора восприимчивость в случае плоских, удлиненных частиц выше, чем в случае округлых частиц.
Одновременно с возникновением сил взаимодействия между частицами возникает вращающий момент, действующий на систему частица-частица, цепочка-частица:
Мвр = mlHsinβ, м2*кг/с2.
Под действием этого момента угол β стремится к нулю (β — угол между линией, соединяющей частицы, и направлением вектора внешнего поля H). В результате все цепочки оказываются ориентированными по направлению внешнего поля Н (см. рис. 36).
При увеличении поля Н увеличиваются на торцевых поверхностях радиусы сфер магнитного взаимодействия. Если сферы оказываются пересекающимися, то возникает процесс магнитной коагуляции, происходит соединение цепочек в более длинные соединения и конгломераты. Магнитные свойства этих конгломератов оказывают влияние на картину магнитных полей на поверхности изделия.
Параллельное соединение цепочек в суспензии практически не происходит, так как возникают магнитные силы отталкивания в случае сближения цепочек с одноименными магнитными полюсами.

Рис. 36. Магнитное поле над трещиной (а); силы, действующие на частицу в поле рассеяния трещины (б): 1 — деталь; 2 — проводник с током; 3 — трещины; 4 — поле рассеяния; 5,6— цепочки из частиц порошка; 7 — порошок над трещиной.
Они смещаются друг относительно друга вдоль своих продольных осей из-за значительной неоднородности поля по длине цепочек и сосредоточения на их торцевых поверхностях больших количеств порошка. В результате цепочки соединяются торцевыми поверхностями, т.е. встык. Повышенная подвижность образований из порошка объясняет лучшую выявляемость дефектов с помощью суспензий.
Например, при концентрации порошка (ТУ 6-36-05800165-1009-93) в керосиновой суспензии 20 г/л и напряженности 100...150 А/см происходит интенсивная магнитная коагуляция, отдельные этапы которой описаны и работе [5] и показаны на рис. 37.

Рис. 37. Последовательные фазы деформации цепочек из частиц порошка в жидкости (х10): 1 — цепочки, образовавшиеся в ионе напряженностью 100 А/см; 2, 3 — цепочки в процессе оседания; 4 — агрегаты, хлопья, образовавшиеся из цепочек при размешивании суспензии.
При коагуляции основная масса частиц соединяется в цепочки-нити (рис. 37, 1). После снятия поля цепочки в результате различных скоростей оседания их частей приобретают вид переплетающихся нитей (рис. 37, 2, 3). При размешивании такой суспензии части нитей соединяются разноименными магнитными полюсами и образуют крупные агрегаты, хлопья, комочки (рис. 37, 4). Интенсивная магнитная коагуляция делает индикаторные рисунки нечеткими, вызывает значительный фон из порошка, что значительно затрудняет расшифровку осаждений порошка. Кроме этого, осаждение порошка происходит не только над трещинами, но и над рисками, над местами грубой обработки поверхности. На рис. 38 показана схема полей рас сеяния над трещиной и риской. Если в суспензии образуются цепочки, длина которых превышает эффективный радиус сферы действия поля рассеяния ρпр (ρпр — расстояние от места выхода трещины на поверхность до точек над ней, в которых сила магнитного притяжения равна силе сопротивления движению частиц), то иоле дефекта действует только на часть 4, а часть 5 цепочки находится практически вне поля рассеяния. Такие цепочки выпадают на контролируемую поверхность и создают значительный фон, шунтируют поля рассеяния.
Короткие цепочки длиной 0,01...0,1 мм позволяют получить четкий рисунок над дефектами с большим градиентом ноля (усталостными, шлифовочными трещинами, волосовинами и др.).

Рис. 38. Формирование реплики над трещиной и риской: 1 — трещина; 2 — риска; 3 — цепочка из частиц порошка; 4 — часть цепочки в магнитном поле рассеяния трещины; 5 — часть цепочки вне поля рассеяния; Fр — результирующая сила; F1 F2 — составляющне сил F.
Они слабо осаждаются в полях малого градиента (рисками, наклепом, карбидной полосчатостью и др.).
На интенсивность магнитной коагуляции оказывают влияние следующие факторы: концентрация, дисперсность, магнитные характеристики, предыдущее магнитное состояние порошка, вязкость дисперсионной среды, напряженность и градиент поля, длительность его действия, автокоагуляция. Изменяя параметры этих факторов, можно добиться оптимального состава магнитной суспензии для конкретных объектов. Например, для контроля деталей способом остаточной намагниченности эффективной является суспензия следующего состава: дисперсионная среда-керосин или керосино-масляная смесь; концентрация порошка 15... 20 г/л; содержание поверхностно-активного вещества Акор-1 — 0,3...0,5 г/л. Перед применением суспензию подвергают сепарации для удаления крупных и слипшихся частиц.
Если контроль проводят в приложенном поле при напряженности до 100 А/см, то концентрацию порошка уменьшают до 5...7 г/л, а при напряженности поля более 150 А/см концентрацию порошка устанавливают не более 3 г/л.
Из изложенного следует, что в поле дефекта происходят следующие процессы:
намагничивание ферромагнитных частиц и соединение их в цепочки с ориентацией по магнитным силовым линиям в области дефекта;
движение образовавшихся цепочечных структур, а также отдельных частиц.
Контроль в приложенном поле не всегда обеспечивает более высокую чувствительность, чем контроль на остаточной намагниченности. Это объясняется тем, что при контроле в приложенном поле порошок осаждается по волокнам металла, в местах структурной неоднородности, по следам грубой обработки поверхности, по рискам, в местах резкого изменения геометрии проверяемой поверхности, а также вследствие возможного неблагоприятного направления магнитного потока в детали.
Контроль способом остаточной намагниченности проводят в случаях, если деталь выполнена из магпитотвердого материала, имеющего коэрцитивную силу Нс > 9,5 А/см, а намагничивающее устройство позволяет создать поле напряженностью, близкой к Нт.
Контроль на остаточной намагниченности имеет ряд существенных достоинств:
возможность установки проверяемой детали в любое удобноеположение;
возможность нанесения суспензии как путем полива, так и одновременным погружением нескольких деталей в ванну с суспензией;
простота расшифровки, так как в этом случае порошок в меньшей степени оседает по рискам, наклепу, местам грубой обработки поверхности;
меньшая возможность перегрева деталей в местах их контакта с дисками зажимного устройства дефектоскопа, так как ток пропускают короткое время (0,015...2 с);
- обеспечивается более высокая производительность контроля.
При быстрых периодических изменениях напряженности магнитного поля вид петли, выражающей зависимость В = f(H), поля рассеяния дефекта, отличается от статической петли гистерезиса, получаемой при медленных изменениях напряженности поля. При этом магнитная индукция является функцией не только напряженности поля, но и ее производных по времени. Причиной этого являются вихревые токи, возникающие в ферромагнитном материале, и магнитная вязкость. Площадь динамической петли, выражающей реальную зависимость В = f(H), определяется полными потерями в единице объема ферромагнитного вещества на перемагничивание и на вихревые токи за один период изменения напряженности поля.
Значение коэффициента размагничивания N сильно меняется в зависимости от размеров и конфигурации детали, от характера внешнего магнитного поля, от магнитных характеристик ферромагнетика. На рис. 39 приведены зависимости В = f(H) для двух объектов контроля, один из которых имеет воздушный зазор.
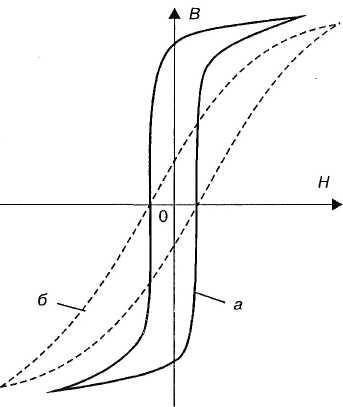
Рис. 39. Влияние воздушного зазора на форму петли гистерезиса: а — без зазора; б — с зазором.
В случае разветвленного магнитопровода процесс перемагничивания значительно усложняется, так как воздействие магнитодвижущей силы (МДС) на один из участков детали может привести к его необратимому перемагничиванию по одному из возможных путей и к обратимому намагничиванию по другим путям. Характер процессов иеремагничивания при разветвленной форме требует особого рассмотрения.
Формы электрических токов в знакопеременных и импульсных магнитных полях
Самые тонкие дефекты при магнитопорошковом контроле определяются при повышенных частотах. В отличие от статического режима, динамической режим характеризуется ограниченным временем воздействия намагничивающей МДС. Если при статическом режиме переходные процессы и материале магнитопровода успевают закончиться до прекращения действия МДС, то в динамическом режиме переходные процессы часто не могут закончиться за время действия МДС. Основными показателями, определяющими режим перемагничивания в переменных магнитных полях, являются величина амплитуды намагничивающей МДС и ее время действия. Кроме этого, большое значение имеет; характер изменения МДС во времени, который может быть, как периодическим, так и апериодическим. На рис. 40 приведены различные возможные случаи изменения намагничивающей МДС во времени. На рис. 40, а-д изменение МДС носит периодический характер, при котором отсутствуют паузы между воздействиями МДС противоположных полярностей. На рис. 40, е-з изменение МДС носит апериодический или, как часто называют, импульсный характер. Различают также симметричный и несимметричный характеры воздействия МДС, которые к тому же могут отличаться как по амплитуде, так и по длительности воздействия. При симметричном периодическом характере воздействия МДС F+m = F-m, t+ = t- = Т/2 и t+ + t- =T, при несимметричном периодическом характере воздействия МДС F+m ≠ F-m или t+ ≠ t- ≠ Т/2, но t+ + t- =T (рис. 40). Здесь F+ m и F- m — максимальные значения намагничивающей МДС положительной и отрицательной полярности, a t+ и t- — значения времени действия МДС соответствующих полярностей. Симметричный или несимметричный характер воздействия может иметь место и при апериодическом изменении МДС с той лишь разницей, что t+ + t- < Т, так как Т = t+ + t- + tn (рис. 40, е, ж), где tn — время паузы. Изменение МДС по форме может носить прямоугольный, синусоидальный, трапецеидальный характер и т.п. Однако форма намагничивающий МДС начинает сказываться лишь при небольших амплитудных значениях МДС, когда создаваемое магнитное поле по величине соизмеримо с коэрцитивной силой материала (Нт » Нс). При достаточно больших амплитудах МДС, когда создаваемое магнитное поле по величине значительно больше коэрцитивной силы Нт » Нс), форма МДС практически не сказывается на режиме перемагничивания, в особенности если время нарастания МДС существенно меньше длительности воздействия МДС.

Рис. 40. Различные законы изменения тока во времени i(t) в намагничивающей цепи.
При перемагничивании в быстроменяющихся знакопеременных магнитных полях конфигурации петель гистерезиса по сравнению со статическими изменяются (рис. 41).

Рис. 41. Динамические петли гистерезиса (а); построение кривых тока с учетом гистерезиса (б, в).
Такие петли гистерезиса называются динамическими (рис. 41, а). Изменение формы петель гистерезиса обусловлено временными эффектами (вихревыми токами, магнитной вязкостью), которые в значительной мере зависят от электрических параметров магнитного материала. В свою очередь степень влияния вихревых токов зависит от частоты перемагничивания, от характера перемагничивания (периодического или импульсного), от режима перемагничивания (симметричного или несимметричного) и т.п. Динамические параметры магнитных материалов значительно отличаются от статических. Величина коэрцитивной силы Нс, например, увеличивается, так как петля гистерезиса расширяется, а абсолютная магнитная проницаемость материала μа уменьшается.
Всякое изменения магнитного потока внутри замкнутого контура индуцирует в этом контуре ЭДС, вызывающую в контуре электрический ток. Токи в проводящей среде, индуцированные изменяющимся магнитным потоком, являются вихревыми. Из-за малой величины электрического сопротивления металлических магнитопроводов вихревые токи могут достигать значительных величин. В свою очередь вихревые токи в контролируемой детали образуют собственное магнитное поле, которое направлено навстречу магнитному потоку, их создавшему. Взаимодействие встречных магнитных потоков приводит к поверхностному эффекту (скин-эффекту), т.е. к резкому уменьшению проникновения переменного электромагнитного поля в глубь магнитного материала. При сильно выраженном поверхностном эффекте переменное магнитное поле в основном сосредоточено в тонком поверхностном слое.
Ферромагнитная деталь под действием вихревых токов нагревается, а эффективное сечение из-за поверхностного магнитного эффекта уменьшается. Величина коммутируемого магнитного потока уменьшается и вместе с тем это способствует обнаружению мелких поверхностных дефектов.
Знакопеременное напряжение, изменяющееся и по амплитуде и по фазе обусловливает изменение магнитной проницаемости. С ростом напряженности магнитного поля (тока в обмотке катушки) магнитная проницаемость сначала увеличивается, а затем, достигнув максимума, уменьшается.
Полный магнитный поток Ψ, сцепленный с витками катушки, не пропорционален току i. Поэтому индуктивность катушки:
L = Ψ /i
и индуктивное сопротивление х=ωL являются величинами переменными. Кривая L = f(i) повторяет ход кривой μ = f(i) магнитной проницаемости.
При синусоидальном напряжении, подведенном к зажимам катушки, если пренебречь ее активным сопротивлением, мгновенное значение тока:
![]()
будет изменяться по несинусоидальному закону, так как индуктивность L является величиной нелинейной. На практике часто этой нелинейностью пренебрегают, несинусоидальный ток катушки при расчетах заменяют эквивалентной синусоидой. Однако при магнитном контроле с использованием датчиков, реагирующих на мгновенные значения тока, магнитных потоков рассеяния важно, знать и характер изменений и мгновенных значений параметров электрической цепи. Кривую мгновенных значений тока i = f(t) можно построить, если известны кривые зависимостей F = f(t) и F = f(i).
Построение производят следующим образом: для произвольного момента времени 1 по кривой F = f(t) определяют значение магнитного потока 2; затем по кривой намагничивания F = f(i) находят соответствующее значение тока i; откладывают значение тока от точки 1 вверх (или вниз).
Построив для различных моментов времени ряд точек и соединив их плавной линией, получают искомую кривую тока.
Из построения видно, что в данном случае (без учета гистерезиса) магнитный поток и ток одновременно проходят через нулевое и максимальное значения. Здесь активная мощность равна нулю.
При наличии гистерезиса в каждом полупериоде процесс намагничивания и размагничивания детали происходит по несовпадающим ветвям петли гистерезиса. Поэтому кривые тока и магнитного потока неодновременно проходят через нулевые значения. Сдвиг между ними обозначают через α. Здесь активная мощность не будет равна нулю.
Размагничивающее поле контролируемой детали и дефекта
Намагниченность зависит от напряженности магнитного поля и формы тела. Если ферромагнитное тело помещено в однородное магнитное поле, то на его поверхности создастся дополнительное магнитное поле Н0, направленное внутри образца противоположно внешнему полю и намагниченности. Следовательно, на внешнее поле будет накладываться собственное, размагничивающее поле. Тогда истинное поле внутри тела будет равно разности:
H=He-H0.
Многие детали могут быть условно представлены в виде шара или элипсоида.
Шар из вещества с магнитной проницаемостью μ, помещенный во внешнее однородное магнитное поле, поляризуется магнитно однородно. Если шар помещен в пустоте и μ > μ0, тогда вектор напряженности Н0 поля, определяемого намагниченностью шара, оказывается внутри шара направленным против вектора напряженности Не внешнего поля. Поле вектора Н0 называется размагничивающим полем.
Напряженность размагничивающего поля внутри детали меньше внешнего:
![]()
Вне
шара поле, вызванное
намагниченностью шара,
такое же, как поле тока
в весьма малом замкнутом
контуре, находящемся в центре шара,
имеющего
магнитный момент р,
равный
геометрической
сумме магнитных моментов всех элементарных
токов в объеме шара:
![]() где
R
– радиус шара.
где
R
– радиус шара.
Результирующая напряженность и результирующая магнитная индукция внутри шара равны:
![]()
![]()
Чем больше μ, тем сильнее размагничивающее поле и тем слабее поле Н, но тем сильнее поле В. В пределе при μ→∞ имеем:
Н0 = Не, Н = 0; В = 3Ве, В = В/3.
Таким
образом, индукция (магнитный поток) в
![]() внутри
детали существенно меньше внешней. На
рис.
42 изображены: внешнее однородное поле
эллипсоида, поле
вектора H,
определяемое намагниченностью эллипсоида
и связанное с условным представлением
о наведенных магнитных
массах, результирующее поле вектора Н
и
результирующее
поле вектора В.
внутри
детали существенно меньше внешней. На
рис.
42 изображены: внешнее однородное поле
эллипсоида, поле
вектора H,
определяемое намагниченностью эллипсоида
и связанное с условным представлением
о наведенных магнитных
массах, результирующее поле вектора Н
и
результирующее
поле вектора В.
Для деталей как Н0, так и J, пропорциональны напряженности Не внешнего поля. Стало быть, можно написать:
H0 = NJ.
Коэффициент пропорциональности N называют коэффициентом размагничивания. От него зависит при данной намагниченности величина напряженности размагничивающего коля. Коэффициент размагничивания зависит от формы намагничиваемого тела (рис. 42).

Рис. 42. Картина магнитных полей эллипсоида.
Свойство эллипсоидов однородно намагничиваться в однородном внешнем поле используется в магнитометрии.
Расчетный коэффициент размагничивания точен только для эллипсоидов и их частных случаев: шара, пластины, бесконечно длинного цилиндра с эллиптическим или круговым сечением (табл. 5). Тела, отличные по форме от эллипсоидов, намагничиваются неоднородно даже в однородном внешнем магнитном поле.
Более того, неравномерно внесенное в магнитное поле тело эллипсоида (рис. 43) может дать частичное полюсное намагничивание, т.е. неравномерное намагничивание, другой размагничивающий фактор.

Рис. 43. Поле тела вращения, частично внесенное в равномерное магнитное поле.
Таким образом, истинная напряженность магнитного поля Н, которая действует на металл, меньше напряженности кнешнего поля Не. Размагничивающий фактор N в сильной степени зависит от относительной длины образца, отношения длины к поперечным размерам.
Таблица 5. Значения размагничивающего фактора для деталей разной формы
-
Геометрическая форма
Отношение осей эллипсоидов, a/b
N
Очень тонкий диск, расположенный нормально к полю
0
1
Очень длинный цилиндр, расположенный вдоль поля
∞
0
Шар
1
0,333
Эллипсоиды с разным соотношением размеров
2
0,173
»
3,2
0,1
»
1,6
0,01
»
61,7
0,001
Очень длинный цилиндр с осью по нормали к полю
-
0,5
Тороидальный сердечник с небольшим воздушным зазором
-
δ/l
Значения N уменьшаются с увеличением длины образца и для практических расчетов могут быть взяты из табл. 5. Можно получить следующую зависимость между внутренним и внешним полями Н и Не:
![]()
где λ — магнитная восприимчивость вещества, которая определяется только физической природой материала. Величина λ связана с магнитной восприимчивостью тела λ е соотношением:
![]()
Используя λе, нетрудно получить выражение для магнитной проницаемости тела:
![]()
где μ — относительная проницаемость вещества; μe — относительная проницаемость тела.
Итак, магнитная проницаемость μe и восприимчивость детали зависят не только от физической природы материала, но и от формы тела. Обе эти величины для детали меньше, чем для вещества.
Обычно требуется знать магнитные свойства ферромагнетиков в функции истинного, внутреннего магнитного поля. Поэтому рассмотрим, как производится пересчет намагниченности кривой J = f(He) на J = f(H), так как практически всегда определяется зависимость намагниченности от внешнего магнитного поля. Графический метод пересчета был предложен Рэлеем и называется методом сдвига. На рис. 44 кривая J(He) соответствует кривой намагничивания тела в зависимости от внешнего поля.

Рис. 44. Графическое построение реальной кривой намагничивания вещества детали по ее размагничивающему фактору.
Для того, чтобы построить кривую намагничивания вещества J(He), необходимо знать размагничивающий фактор детали N. Зная N, можно построить зависимость намагниченности от размагничивающего поля Н0. Из соотношения Н0 = NJ нидно, что это прямая линия, наклон которой к оси J определяется из равенства:
![]()
Если провести прямую параллельно оси Н, то она пересечется с кривой J = f(H) в точке Е, соответствующей намагниченности Je и внешнему полю Hе, а с прямой ОС в точке D. Величина отрезка BD соответствует величине размагничивающего поля при намагниченности Je.
Чтобы получить значение истинного поля при Je, отложим на прямой, параллельной H, отрезок ЕА = BD. Тогда величина отрезка ВА = ОНА даст значение внутреннего поля, соответствующее внешнему полю Не =НЕ.
Таким способом можно определить для каждой точки кривой J = f(H) значение внутреннего поля и построить кривую намагниченности вещества (кривая J(He), рис. 44).
Рассмотренный пересчет справедлив для упрощенного случая, когда размагничивающий фактор N является постоянной величиной и не зависит от J.
Для проведения указанного выше пересчета необходимо знать N, который можно аналитически рассчитать только для однородно намагниченного тела. Приведем некоторые формулы расчета N тел в форме эллипсоида вращения при намагничивании вдоль оси вращения. В случае сфероида, когда λ < 1, имеем:

Когда λ > 1, имеем:

Если λ > 50, то последняя формула упрощается и принимает вид:
![]()
В приведенных формулах величина λ есть относительная длина эллипсоида, равная отношению его осей.
Полезно знать размагничивающие факторы деталей, которые по своей форме приближенно являются частным случаем эллипсоида вращения. Так, размагничивающий фактор тонкой пластинки или диска, когда λ ≈ 0, равен:
N ≈ 1,0.
Если намагничивается бесконечно длинный цилиндр вдоль своей оси, то для него размагничивающий фактор равен:
N ≈ 0.
В табл. 5 приведены приблизительные значения размагничивающих факторов деталей разных форм в однородном магнитном поле. Образцы конечной длины пеэллипсоидалыюй формы в однородном внешнем поле намагничиваются неравномерно. В этом случае размагничивающий фактор — переменная величина. Для описания магнитного состояния вещества различают два вида J и В, а следовательно, и два вида размагничивающих факторов: баллистический NB и магнитометрический NM.
Баллистический размагничивающий фактор используется в тех случаях, когда J измеряется в средней части образца. Магнитометрический размагничивающий фактор применяется при усреднении значений J и В по всему объему детали, что имеет место при магнитометрических измерениях.
Значение величины NB всегда меньше, чем NM, так как при намагничивании, например, в однородном полецилиндрического образца намагниченность в средней части JB всегда больше Jм.
Для расчета значений Nb и Nm можно использовать следующие формулы: если λ → 0 при 9 ≤ λ ≤ 28, то:
![]()
![]()
где λ — отношение длины цилиндра к его диаметру.
Ниже приведены значения NB и NM для деталей, по форме напоминающих эллипсоиды и цилиндры для разных значений λ:
-
λ
N эллипсоида
NB цилиндра λ → 0
NM цилиндра λ → 0
10



20



30


50



100



200



Форму образцов при прецизионных измерениях нужно выбирать такой, чтобы намагниченность была однородной или близка к ней. Это может иметь место только для образцов эллипсоидальной и тороидальной форм с небольшим отношением ширины сечения к радиусу тороида. Для деталей, имеющих форму тороидов, размагничивающий фактор N = 0, и поэтому значение внешнего магнитного поля равно истинному намагничивающему полю Н. В других случаях, если размагничиващий фактор N известен, значение поля Н требуется рассчитать или измерить.
Роль размагничивающего фактора возрастает с уменьшением размеров и имеет существенное значение при расчете режимов намагничивания.
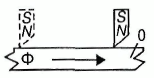
Размагничивающий фактор должен учитываться также при выборе формы используемых ферромагнитных частиц и при расчете намагничивания деталей, особенно при наличии в магнитной цепи воздушных зазоров. На рис. 45 представлена часть кривой намагничивания кольца из ферромагнитного материала, имеющего остаточную индукцию В. После введения в это кольцо воздушного зазора остаточная индукция его понижается до величины Вδ. Тангенс угла α в данном случае является величиной, равной размагничивающему фактору.

Рис. 45. Задний фронт кривой намагничивания: Вr, Вδ — остаточные индукции сплошного кольца и кольца с воздушным зазором, Нδ — напряженность в воздушном зазоре δ; α — угол, определяющий размагничивающий фактор.
Известно, что воздушный зазор в ферромагнитном намагниченном теле можно заменить экранирующей обмоткой, нагруженной на соответствующее сопротивление. Таким образом, реальную деталь или набор последовательно составленных деталей для одновременного намагничивания с общим зазором δ может быть приведен к расчетной условной детали без зазора. Напряженность поля внутри такой детали Н равна разности напряженности внешнего поля Не и размагничивающего поля NJ. Поэтому, чем меньше общая протяженность этих деталей, тем относительно больше величина NJ. Для получения равной величины внутреннего поля Н для короткого набора деталей требуется относительно большее внешнее магнитное поле. Например, для деталей из стали ЗОХГСНА, в которых возникают шлифовочные и усталостные трещины, зависимость величины тока намагничивания приведена на рис. 46. Чем меньше отношение общей длины l к определенному диаметру d, тем больше требуется величина тока в индукторе для получения той же величины напряженности магнитного поля.
Размагничивающий фактор зависит от геометрической формы намагничиваемого тела, наличия и распределения немагнитных включений, а также от направления намагничивания (рис. 47).

Рис. 46. Значение тока намагничивания от геометрических размеров контролируемой детали из стали 30ХГСНА, имеющей протяженность l и диаметр d.

Рис. 47. Намагничивание цилиндра продольным (а) и поперечным (б) полем.
Размагничивающий эффект дефекта, расположенного внутри детали, демонстрируется на рис. 48. Он также зависит от конфигурации. И с этих позиций трещина поперек поля намагничивания обладает максимальным размагничивающим фактором.
Условно намагниченная деталь с дефектом (рис. 48, а) представлена в виде равномерно намагниченной среды (рис. 48, б) и элемента с геометрией дефекта (рис. 48, в).

Рис. 48. Представление поля детали с дефектами как равномерного магнитного поля и поля тела, имеющего форму дефекта.
Если деталь не насыщена, то поле дефекта увеличивает индукцию в приповерхностном слое и на поверхности почти нет поля рассеяния. Только при достаточно большом намагничивании на поверхности обнаруживается поле рассеяния от внутренних дефектов. Для получения поля рассеяния от дефекта на поверхности детали направление поля должно быть нормально к плоскости дефекта и достаточно большим, чтобы насытить перемычку над дефектом. Внутри дефекта магнитный поток распределен неравномерно. Это распределение зависит от конфигурации дефекта, близости его расположения к поверхности и степени насыщения детали.
Как видно из условий постоянства нормальной составляющей индукции на поверхности дефекта справа и слева (на границе сред с проницаемостями μFe и μ0), напряженность поля Н внутри дефекта в μFe / μ0 раз выше, чем в металле: BnFe = Вп0, μFeHFe = μ0H0, H0 = μFeHFe / μ0.
Таким образом, поле рассеяния дефекта представляется как наложение на равномерное поле магнитного поля фигуры, повторяющей форму дефекта.
Строго говоря, расчет намагничивающего поля детали должен производиться с учетом размагничивающих факторов дефектов. Очевидно эти коэффициенты зависят от формы дефектов. Плоский дефект в зависимости от ориентации может иметь любое значение в пределах N = O...1,0, a круглый и эллипсообразный — только N = 0,333...0,001 (см. табл. 5) и т.д.
Выше приведены идеализированные значения коэффициента N для некоторых геометрических форм, условно представленных в виде эллипсоидов с отношением осей а/b. Ось а направлена вдоль эллипсоида, а ось b нормальна к полю.
Неограниченное увеличение одной из осей приводит к тороиду (а/b = 0), неограниченное увеличение другой оси (а/b = 0) приводит к тонкому диску.
Теоретически истинное поле внутри стальной детали равно
H = He - NJ-NДJ,
где N, NД — размагничивающие факторы формы детали и дефектов, может быть намного меньше приложенного поля Ne. Только для сильно вытянутого цилиндра, расположенного вдоль поля или тороида без дефектов величина N→0. Применительно к задачам магнитной дефектоскопии можно утверждать, что правильным приложением поля можно достичь нужного уровня напряженности внутри детали. С позиций расхода электроэнергии намагничивание деталей предпочтительно вдоль наиболее протяженного размера (рис. 47), а с позиций обнаружения продольных трещин — направление намагничивания должно быть другим.
Если не ориентироваться на характерное расположение дефектов, то необходимо располагать деталь относительно полезадающей системы так, чтобы эффект размагничивания был наименьшим, а выявляемость дефектов максимальной. На рис. 47 показаны два варианта полезадающих систем, которые используются для намагничивания протяженного цилиндра. При продольном поле намагничивания размагничивающий эффект будет зависеть от отношения размеров P2/P1, а при поперечном — от величин зазоров, протяженности средней линии L и расположения обмотки возбуждения.