

Конспект по ТАУ / My laboratory work po TAY / Лабораторна робота№4
.DOC
 Міністерство
освіти
та науки України
Міністерство
освіти
та науки України
Національний технічний університет України
НТУУ «КПІ»
Лабораторна робота №4
«Аналіз перехідних процесів статичних систем»
Виконав: студент гр. ЕМ-72
III курсу, ФЕА
Ігнатьев А.С.
Перевірив: Гайденко Ю.А.
Київ – 2009
Мета і задачі роботи
 Мета
роботи: проаналізувати перехідні
характеристики статичних систем
автоматичного керування на основі
прямих та опосередкованих методів.
Мета
роботи: проаналізувати перехідні
характеристики статичних систем
автоматичного керування на основі
прямих та опосередкованих методів.
1. Програма роботи
-
Дати опис роботи системи;
-
Навести систему рівнянь для математичного опису кожного фізичного елементу системи та його спрощену передавальну функцію;
-
Скласти структурну схему системи;
-
Навести передавальну функцію розімкненої та замкненої системи;
-
Якщо це випливає з завдання, уточнити коефіцієнт підсилення системи необхідний для забезпечення заданої точності керування;
-
Використовуючи критерій стійкості перевірити систему на стійкість;
-
Скласти S-модель за передавальною функцією, використовуючи блок Transfer Fnc та зафіксувати параметри перехідного процесу – стійкість або нестійкість, частота коливань, перерегулювання та час перехідного процесу для стійких систем;
-
Якщо система нестійка, ввести в неї гнучкий негативний зворотній зв’язок типу стабілізуючої ланки або коректуючу ланку. Підібрати необхідний Т стабілізуючої ланки;
-
Розглянути перехідний процес у такій схемі змінюючи параметр Т стабілізуючої лан ки. Оцінити якість перехідного процесу.
2. Виконання лабораторної роботи
1.Визначити схему статичної системи, параметри елементів, що до неї входять. Принципова схема подана на Рис. 1.

Рис. 1
Вхідні дані:
У якості генератора у керованій системі Г-Д використано електромашинний підсилювач типу ЭМУ-70. Коефициєнт підсилення ЕМП по напрузі КЕМП=2N=14.Постійні часу каскадів 1 і 2: Т1=0,07, c та Т2=0,01N-0,01, с. Двигуна постійного струму має такі номінальні параметри:Uн=2N+100=118 В; nн=3000 об/хв; Тя=0,005 с; Тм=0,01N/2=0,035, с.
У системі використано тахогенератор типу ТГ-3 з даними nмах=4000 об/хв; Е=400/0,2N. Еталонна задаюча напруга Uзад=100 В.
Оцінити можливу похибку системи якщо відомо, що у розімкненій системі під впливом зовнішніх збурюючих факторів: коливання навантаження на валу двигуна, нагрівання, коливання обертів ЕМП, частота обертання могла змінюватись на N%.
Складемо S-модель заданої системи керування, попередньо визначивши передавальні функції кожної ланки:

 Для
ЕМП
Для
ЕМП
![]()
Для двигуна постійного струму
при якірному керуванні:
![]()
Для тахогенератора:
![]()
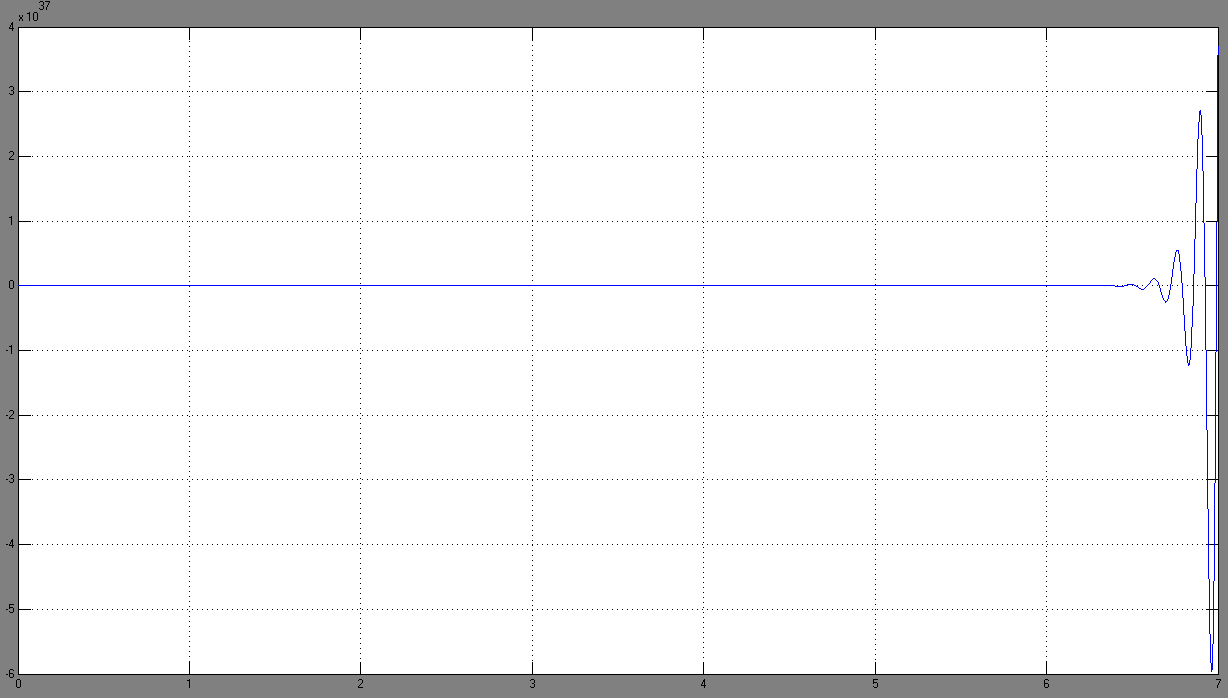
Одержаний графік перехідного процесу свідчить про те, що система не стійка потрібно вводити стабілізуючу ланку.
Перевіримо систему на стійкість по критерію Раута-Гурвиця, скористаємось характеристичним рівнянням замкненої системи:
F(p)=7.35*10^(-7)*p^4+169,75*10^(-6)*p^3+89,25*10^(-4)*p^2+0,155*p+39,5826;
B =
0.0002 0.1550 0 0
0.0000 0.0089 39.5826 0
0 0.0002 0.1550 0
0 0.0000 0.0089 39.5826
det(B) = -3.6551e-005
B1 =
0.0002 0.1550 0
0.0000 0.0089 39.5826
0 0.0002 0.1550
det(B1)= -9.2341e-007
B2 =
0.0002 0.1550
0.0000 0.0089
 det(B2)=1.4011e-006
det(B2)=1.4011e-006
Система не стійка бо маємо два відємних мінори.
Згідно правил включення стабілізуючої ланки введемо таку ланку в систему:

Перехідна характеристика матиме вигляд:

З перехідної характеристики отримуємо наступні параметри:
tmax=0.57 c
tн=0.53 c
tp=1.6 c
T=0.12 c
ymax=32.7
yуст=19.2
Висновок: в ході роботи була досліджена схема керування швидкості обертання двигуна постійного струму за допомогою тахогенератора, підсилювача магнітного поля. При відхиленні вхідного сигналу – напруги тахогенератора – система автоматичного керування зменшує швидкість двигуна. Як показала перехідна характеристика, після включення стабілізуючої ланки, перехідний процес скінченний та система при даних параметрах є стійкою.
