

Конспект по ТАУ / My laboratory work po TAY / Губеня а
.doc

Мета роботи: навчитись моделювати електричні машини і інші електротехнічні пристрої в якості типових динамічних ланок лінійних автоматичних систем.
В якості математичних моделей електромеханічних об’єктів були дослідженні:
1. Генератор постійного струму (ГПС), який має таку математичну модель:

В режимі неробочого ходу для ГПС вхідним сигналом даної моделі є напруга збудження (Uзб), а вихідним – ЕРС обмотки якоря (Еа).
![]()
![]()
![]()
![]()
 ;
;
 ;
;
 ;
;
 ;
;
Структурна схема матиме вигляд аперіодичної ланки 1-го порядку:



Рис.1 реакція ланки на функцію Хевісайда

Рис.2 амплітудно-фазо-частотна характеристика для заданого ГПС
2.Автономний синхронний генератор.
 У
вихідному рівнянні рівноваги кола
збудження
У
вихідному рівнянні рівноваги кола
збудження
1)
Повне потокозчеплення обмотки збудження
![]()
Враховуючи
що
![]()

Множимо
обидві частини рівняння на
2)
Розглянемо що становлять складові цього рівняння
![]() та
та
![]()
 ,
,
Де коефіцієнт підсилення

Якщо
коефіцієнт при похідній у рівнянні 2)
помножити та поділити на
![]() ,то
одержимо р-ння
,то
одержимо р-ння
3)


Із векторної діаграми можемо отримати такі рівняння

 тобто
тобто
З іншого боку
![]()
З
урахуванням, що
![]() одержимо
вираз похідної
одержимо
вираз похідної


Поділимо
обидві частини рівняння на


Оскільки це теж аперіодична ланка, то характеристики вона має такі ж як і ГПС
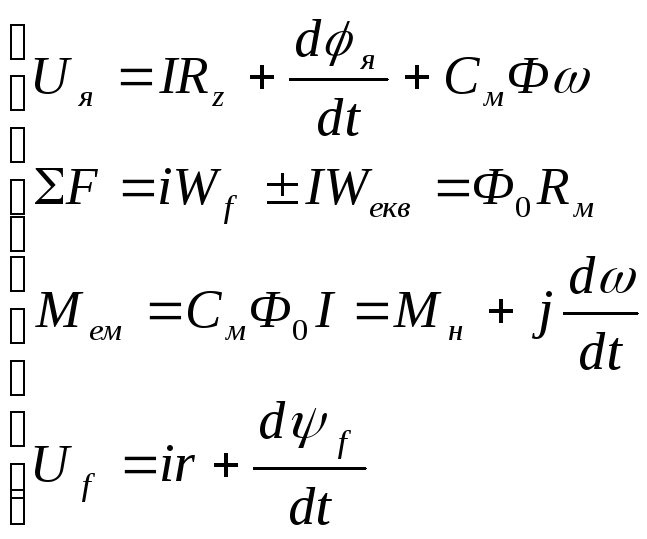
3. ДПС. Розглянемо базову систему рівнянь рівноваги по всім силовим колам:
- коло якоря
- магнітне коло
- механічне коло
- коло збудження
В системах безперервного керування найбільш поширені 2 методи: якірне, у якому керуючим вхідним сигналом є напруга на якорі, та полюсне, у якому керуючим сигналом є напруга на обмотці збудження. Розглянемо побудову моделей для обох варіантів.
При якірному керуванні:
При умові, що Мн
прямує до 0, або Мн
=const,
та розглядаючи струм якірного кола як
суму статичної
![]() та динамічної складової струму ія,
а також потокозчеплення
якірної обмотки як
та динамічної складової струму ія,
а також потокозчеплення
якірної обмотки як
![]() ,
можемо згорнути вироджену с-му р-нянь:
,
можемо згорнути вироджену с-му р-нянь:

та одержати математичну модель у канонічній формі:
![]()
де
![]() коефіцієнт передачі (підсилення);
коефіцієнт передачі (підсилення);
![]() ,
,
![]() ,
с-
електромеханічна та електромагнітна
стала часу.
,
с-
електромеханічна та електромагнітна
стала часу.
![]()
![]()
Подібний вузол, як відомо має потенційно-коливалний характер перехідноо процесу і відповідає типовій коливальній елементарній ланці, але ланці з типовою не лінійністю типу зони не чуттєвості і тільки за умови нехтуванням впливом напруги зрушення Uзр=ІстRя лінійну найпростішу S-модель двигуна використовуючи блок передавальної ф-ції:
![]()
![]()
При якірному керуванні:
Головна позитивна якість цього методу це зменшена потужність системи керування і відповідні техніко-економічні переваги.
Загальна систем рівноваги у
цьому разі структурно-нелінійна, оскільки
окрім змінних коефіцієнтів, у першу
чергу магнітного опору Rµ,
у рівняння входять співмножники невідомих
змінних типу CмФІ
та CмФ![]() .
Тому лінеаризація системи за умов
максимального спрощення можлива тільки
при розгляді малих прирощень, що дозволяє
згорнути систему до передавальної
функції:
.
Тому лінеаризація системи за умов
максимального спрощення можлива тільки
при розгляді малих прирощень, що дозволяє
згорнути систему до передавальної
функції:
![]()
 де
у якості вхідних і вихідних сигналів
розглядаються малі прирощення напруги
збудження ∆Uf
та частоти обертання ∆
де
у якості вхідних і вихідних сигналів
розглядаються малі прирощення напруги
збудження ∆Uf
та частоти обертання ∆![]() відносно заданого усталеного режиму.
відносно заданого усталеного режиму.
Приймемо k=4; T1=0.05; T2=0.08; T3=0.1;; Тоді передавальна функція: D=k./(T1*T2*T3*jw.^3+(T1*T2+T2*T3)jw.^2+(T1+T2)*jw+1);
Структурна схема матиме вигляд аперіодичної ланки 1-го порядку:


Рис.1 реакція ланки на функцію Хевісайда

Рис.2 амплітудно-фазо-частотна характеристика для заданого ДПС
 Висновки:
Висновки:
В даній лабораторній роботі ми змоделювали генератор постійного струму в якості аперіодичної ланки, автономний синхронний генератор,в якості аперіодичної ланки і двигун постійного струму в якості диференціюючої ланки. Визначили систему рівнянь рівноваги. За допомогою пакету Simulink побудували реакції передавальних функцій досліджуваних об’єктів на ступінчасту вхідну дію. Обчислили та побудували 6 амплітудно-фазо-частотні характеристики досліджуваних об’єктів.
Отже можна зробити висновок, що за допомогою типових динамічних ланок лінійних автоматичних систем можна легко моделювати електричні машини та інші електротехнічні пристрої.
