

Конспект по ТАУ / My laboratory work po TAY / Л.р.№2 Кацапенко
.docМіністерство освіти і науки України
Національний технічний університет України “Київський політехнічний інститут ”
Лабораторна робота №2
Електричні машини як елементи систем автоматики
Варіант - 8
Виконав: ст. гр. ЕМ-72
ФЕА,2 курс
Кацапенко О.І.
Перевірив: Гайденко Ю.А.
КИЇВ-2009
Мета роботи: навчитись моделювати електричні машини і інші електротехнічні пристрої в якості типових динамічних ланок лінійних автоматичних систем.
Програма роботи
-
Погодити з викладачем завдання щодо типу і параметрів досліджуваних електромеханічних об’єктів.
-
Для заданих об’єктів визначити систему рівнянь рівноваги. Вивести математичні вирази для передавальної функції та її параметрів, а саме: коефіцієнту підсилення і відповідних постійних часу.
-
За допомогою пакету Simulink побудувати реакцію передавальної функції досліджувального об’єкту на ступінчату вхідну дію.
-
Обчислити та побудувати АФЧХ досліджуваного об’єкту за допомогою пакету MATLAB.
Хід роботи.
-
Отримаємо математичні моделі даних електромеханічних обєктів та їх передавальні функції.
Автономний синхронний генератор
Записуємо вихідне рівняння рівноваги кола збудження:
Uf = i rf + dФf / dt
Вважаючи: Фf = Xfd I - Xad id
Uf = If rf
Маємо: If rf = i rf + dФf / dt
Поділимо обидві частини рівняння на Xad w / rf :
Xad w If = Xad w i + Xad w dФf / r dt
Xad w If = Eуст
Xad w I = Ed
Edуст=Xad w Uf / r = k Uf , де k – коефіцієнт підсилення визначається як для ГПС:
k = E0 / Uf = П 2^(1/2) f W Kоб Wf / Rм r = Cм w Wf / Rм r
Маємо формулу:
K Uf = Ed + T0 Xad dФf / dt , де T0 = w / r
Помножимо та поділимо коефіцієнт при похідній на Xfd :
K Uf = Ed + T0 Xad dФfd / Xfd dt
Потокозчеплення миттєво змінюватись не може, тому ЕРС, яка визначається цим потокозчепленням, у перший момент залишається незмінною і її називають ЕРС за перехідною реакцією:
Ed’ = Xad w Фfd / Xfd
Тоді маємо:
k Uf = Ed + T0 dEd’ / dt
-
Задамо коефіцієнти підсилення та постійні часу отриманих передавальних функцій:
Автономний синхронний генератор
D(p)=Kг / 1 + Tг p
Kг = 28
Tг = 0.058
ДПС при якірному керуванні
D(p) = K / Tm Tя p2 + Tm p +1
K = 2
Tm = 0.05
Tя = 0.001
ДПС при полюсному керуванні
D(p) = -К / Tзб Tм Tя p3 +(Tм Tя + Tм Tзб)p2 + (Tм + Tзб)p + 1
K = 0.05
Tзб = 0.05
Tм = 0.01
Tя = 0.005
-
Розраховуємо та отримуємо зображення перехідних характеристик досліджуваних обєктів в системі Simulink:
Автономний синхронний генератор


ДПС при якірному керуванні


ДПС при полюсному керуванні


4)Будуємо АФЧХ для досліджуваних обєктів:
Автономний синхронний генератор
>> k=28; T=0.058;
>> w=0:1:10000;
>> jw=i*w;
>> D=k./(T*jw+1);
>> A=abs(D); F=angle(D);
>> polar(F,A)

ДПС при якірному керуванні
>> k=2; T1=0.05; T2=0.001;
>> w=0:1:10000;
>> jw=i*w;
>> D=k./(-T1*T2*w.^2+T1*jw+1);
>> A=abs(D); F=angle(D);
>> polar(F,A)

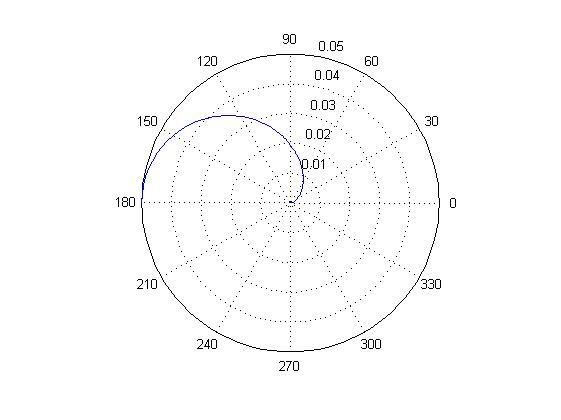
ДПС при полюсному керуванні
>> k=0.05; T1=0.01; T2=0.005; T3=0.05;
>> w=0:1:10000;
>> jw=i*w;
>> D=-k./(-T1*T2*T3*jw-(T1*T2+T1*T3)*w.^2+(T1+T3)*jw+1);
>> A=abs(D); F=angle(D);
>> polar(F,A)
Висновок: