

Справка Trace Mode.Раздел Регулирование
.pdfРаздел ‘Регулирование’ |
Стр. 11 из 17 |
используются настройки, заданные входами блока KP, KD и KDD, а во втором – полученные на соответствующих выходах.
Для перехода в режим автонастройки (одноразовое определение оптимальных настроек регулятора) следует установить в 1 значение входа REG. Для перехода в режим непрерывной адаптации (постоянное определение оптимальных настроек регулятора) нужно на вход REG подать значение 6. В обоих случаях процесс управления объектом осуществляется параллельно с процессом настройки регулятора.
Работа алгоритма настройки основана на подаче на вход объекта пробного гармонического сигнала. Амплитуда колебаний выходного сигнала объекта по умолчанию удерживается в пределах от 0.3% до 1%. Верхний предел амплитуды колебаний может быть изменен подачей отрицательной величины на вход AMP. Абсолютное значение этой величины задает ограничение на амплитуду колебаний выхода объекта.
Критерием выбора настроек является минимизация среднеквадратичной ошибки регулирования. Получаемые настройки минимизируют колебания при переходных процессах.
Реализованный алгоритм является помехоустойчивым. Он работает даже в том случае, если дисперсия шума в несколько раз превышает амплитуду пробных колебаний выходного сигнала. При настройке алгоритм исключает появление неустойчивых режимов работы контура.
Быстродействие процесса самонастройки зависит от уровня шумов, неслучайных возмущений, действующих на объект управления.
Индикатором хода процесса настройки регулятора является величина выхода STS. Он может принимать следующие значения.
0– настройка завершена (или не запускалась);
1– настройка регулятора завершена успешно. Получены значения оптимальных настроек;
2…100 – поиск оптимальных настроек. Значение выхода уменьшается от 100 до 1 и показывает близость к завершению работы алгоритма;
101– невозможно провести адаптацию. Слишком много воздействий на систему или уровень шумов сравним с амплитудой гармоники на выходном сигнале объекта. Следует уменьшить внешние воздействия или попробовать увеличить уровень максимально возможной амплитуды колебаний на выходе объекта;
102– невозможно провести адаптацию. Не удается достигнуть необходимой амплитуды сигнала на выходе (от 0,3 до 1 максимальной). Следует увеличить амплитуду входа или уменьшить амплитуду выхода;
103– невозможно провести адаптацию. Границы диапазона изменения управляющего сигнала не дают увеличить амплитуду сигнала на входе объекта. Следует либо изменить амплитуды, либо сместить уровень управляющего воздействия;
104– невозможно провести адаптацию. Границы диапазона изменения регулируемого параметра не дают увеличить амплитуду сигнала на выходе объекта. Следует повысить ограничение на входную амплитуду или сместить входной сигнал с границ диапазона регулирования;
105– невозможно провести адаптацию. Следует увеличить частоту пересчета программы.
Вслучае нормального завершения адаптации (значение 1 на выходе STS) на выходах KP, KD и KDD формируются новые значения настроек для регулятора. Для их использования надо присвоить новые значения соответствующим входам и задать входу REG значение 0. Для регулирования по полученным настройкам без присвоения их входам следует подать значение 10 на вход REG.
При задании жестких ограничений на амплитуду пробного сигнала алгоритм может сформировать сообщение о невозможности подобрать оптимальные настройки. Минимальное значение амплитуды следует устанавливать с учетом разрядности АЦП, коэффициента усиления и инерционности объекта.
В процессе адаптации значения настроек KDD и KD вычисляются по относительному времени – тактам вызова программы. Для использования настроек во внешних регуляторах необходимо привести их к реальной временной шкале. Значение периода вызова программы можно получить с помощью блока TSTEP.
Ограничения на применение
Данный алгоритм настройки PDD-регулятора не может быть применён к структурно неустойчивым объектам управления.
Оптимальные настройки вычисляются при соотношении времени запаздывания к постоянной времени объекта не более 0,5.
Период опроса параметра и вызова алгоритма настройки должна быть не менее 0.05 постоянной времени объекта.
mk:@MSITStore:C:\Program%20Files\AdAstra%20Research%20Group\Trace%20M... 15.05.2014
Раздел ‘Регулирование’ |
Стр. 12 из 17 |
Амплитуда колебаний регулируемого параметра (отклик на пробный сигнал) должна быть не ниже 8 единиц кода АЦП. Например, 0.5% для 12-разрядного АЦП составляет 20 единиц.
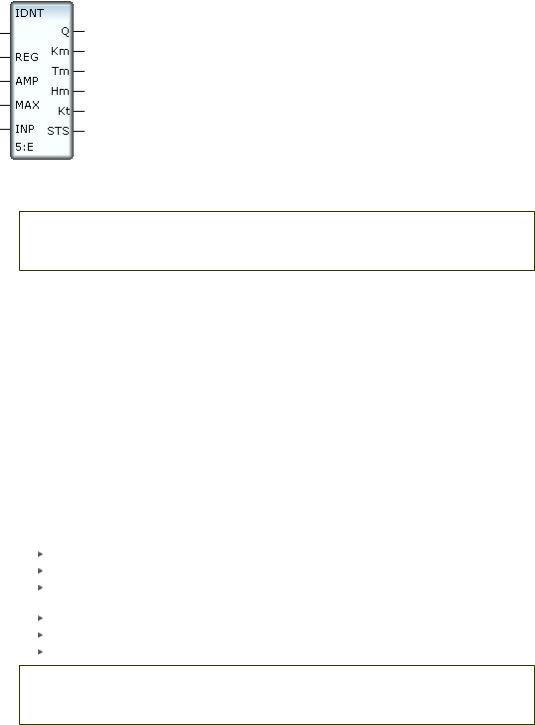
Идентификация объекта (IDNT)
Этот блок по кривой отклика на прямоугольный импульс рассчитывает параметры модели инерционного звена первого порядка с запаздыванием.
Этот блок работает в отладчике программ инструментальной системы, а также под управлением Adaptive Control МРВ, Adaptive Control Double Force МРВ и
Adaptive Микро TRACE MODE в реальном времени.
Входы данного блока используются для следующих целей: REG – управление идентификацией:
1 – начать идентификацию;
0 – остановить идентификацию;
AMP – задание амплитуды пробного импульса;
MAX – задание условия снятия пробного импульса. Когда абсолютная величина разности текущего и начального значений выхода объекта превышает значение MAX, пробный импульс снимается;
INP – на этот вход подается сигнал с выхода анализируемого объекта.
Выходы используются следующим образом:
Q – с этого выхода пробный импульс подается на вход объекта; Km – вычисленный коэффициент усиления модели объекта; Tm – вычисленная постоянная времени модели объекта;
Нм – вычисленное время запаздывания модели объекта;
Kt – вычисленный коэффициент прореживания. Указывает модальному регулятору, насколько реже следует формировать управляющее воздействие по сравнению с циклом опроса;
STS – текущее состояние:
101 – недостаточно информации для идентификации;
102 – слишком большое несоответствие структуры модели и объекта управления;
103 – настройка не завершена. Сброс импульса произведен по длительности. Следует увеличить период канала и повторить процесс идентификации;
2-100 – идентификация;
1 – идентификация завершена успешно; 0 – нет задания на идентификацию.
Коэффициенты модели объекта Тm и Hm вычисляются в тактах пересчета. Для приведения их к реальной временной шкале надо использовать период вызова программы. Это значение можно получить с помощью блока TSTEP.
Описание работы блока
Для идентификации объекта управления необходимо задать амплитуду пробного импульса и условие его снятия.
Амплитуда пробного импульса может быть как положительной, так и отрицательной величиной. Ее следует задавать таким образом, чтобы модуль максимального значения выхода объекта был больше 4 (рекомендуемое значение - 100)
Условие снятия пробного импульса выбирается в соответствии с инерционностью объекта. Если задать его малым, то за время нарастания значения выхода объекта до указанной величины будет получено недостаточно точек для идентификации. Таких точек должно быть не менее 20.
mk:@MSITStore:C:\Program%20Files\AdAstra%20Research%20Group\Trace%20M... 15.05.2014
Раздел ‘Регулирование’ |
Стр. 13 из 17 |
Процесс идентификации нужно проводить на объекте в установившемся режиме, отключив регулятор. В противном случае вычисленная модель не будет адекватна объекту управления.
Для запуска идентификации надо присвоить входу REG значение 1. При этом на выход Q подается значение, заданное входом AMP. Когда абсолютная величина разности текущего и начального значений выхода объекта (выходное значение объекта поступает на вход INP) превышает значение MAX, пробный импульс снимается (Q=0). Пробный импульс снимается также в том случае, если в течение 20 тактов пересчета величина выхода объекта остается неизменной. Далее алгоритм анализирует отклик объекта после снятия пробного импульса. Когда значение выхода объекта становится меньше 3, формируются новые значения выходов Km, Tm, Hm и Kt.
За ходом процесса идентификации можно следить по значению выхода STS. Величина этого выхода устанавливается равной 100 после подачи на командный вход значения 1. Далее в ходе идентификации объекта его значение уменьшается до 1. Значение выхода, равное 1, является индикатором нормального завершения определения параметров объекта.
Для наиболее качественной идентификации объекта управления желательно проведение нескольких опытов при небольших отклонениях от рабочего режима, причем как на положительное приращение, так и на отрицательное с последующим усреднением коэффициентов модели.
Ограничения на применение
Данный алгоритм идентификации не может быть применен к объектам с сильно выраженными накопительными свойствами.
Чем менее инерционен объект, тем выше погрешность его идентификации.
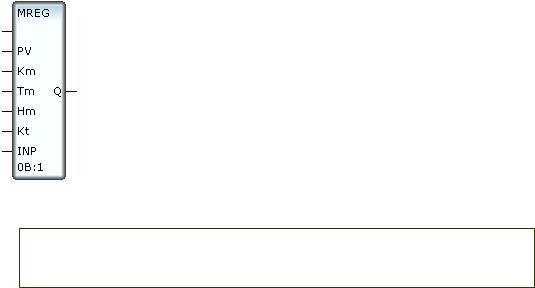
Модальный регулятор (MREG)
Этот блок представляет собой модальный регулятор с функцией вычисления настроек по параметрам объекта управления, что предполагает его совместное использование с блоком IDNT.
Этот блок работает в отладчике программ инструментальной системы, а также под управлением Adaptive Control МРВ, Adaptive Control Double Force МРВ и
Adaptive Микро TRACE MODE в реальном времени.
Входы этого блока имеют следующее назначение: PV – задание регулятору;
Km – коэффициент передачи модели объекта;
Tm – постоянная времени модели объекта (в тактах пересчета); Нm – время запаздывания модели объекта (в тактах пересчета); Kt – коэффициент прореживания;
INP – регулируемая величина с максимальным значением от 4 до 100.
На выходе Q формируется управляющее воздействие.
Описание работы блока
По параметрам объекта, заданным на входах Km, Tm и Hm, вычисляются настройки модального регулятора с наблюдателем полного порядка. Наблюдатель осуществляет динамическую компенсацию запаздывания в объекте, что резко повышает качество управления. Чем меньше точность описания объекта и больше период квантования, тем менее качественно работает блок.
Регулятор переходит в ручной режим в случае равенства 0 входов Km, Tm и Hm одновременно. При этом на выход Q копируется значение задания регулятору (вход PV).
При значительном уровне шума схема модального регулятора обеспечивает фильтрацию шумовых составляющих в выходном сигнале при сохранении хорошей динамики отработки детерминированных
mk:@MSITStore:C:\Program%20Files\AdAstra%20Research%20Group\Trace%20M... 15.05.2014
Раздел ‘Регулирование’ |
Стр. 14 из 17 |
возмущений.
Ограничения на применение
Регулятор используется только при известной математической модели объекта управления. Такая критичность вызвана тем, что выбор структуры регулятора полностью определяется имеющимся математическим описанием объекта.
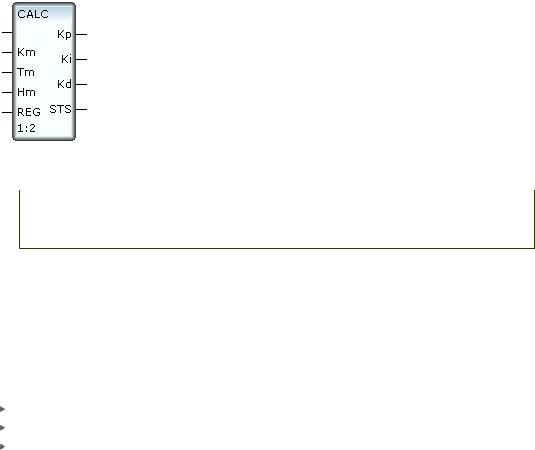
Настройка PID-закона по параметрам объекта (CALC)
Этот блок рассчитывает коэффициенты PID-регулятора на основе параметров математической модели объекта первого порядка с запаздыванием.
Этот блок работает в отладчике программ инструментальной системы, а также под управлением Adaptive Control МРВ, Adaptive Control Double Force МРВ и
Adaptive Микро TRACE MODE в реальном времени.
Входы блока имеют следующее назначение:
Km – коэффициент усиления модели объекта; Tm – постоянная времени модели объекта; Hm – время запаздывания модели объекта; Reg – выбор типа регулятора:
0– PI-регулятор;
1– PID-регулятор.
На входные параметры налагаются следующие требования:
значения входов должны быть неотрицательны;
коэффициент передачи и постоянная времени объекта управления должны быть больше нуля;
отношение запаздывания к постоянной времени должно лежать в пределах от 0 до 2.
Выходы данного блока используются следующим образом: Kp – коэффициент при пропорциональной составляющей; Ki – коэффициент при интегральной составляющей;
Kd – коэффициент при дифференциальной составляющей; STS – флаг ошибки входных параметров:
0 – входные данные удовлетворяют требованиям; -1 – входные данные не удовлетворяют требованиям.
Постоянная времени и запаздывание объекта управления задаются в тактах пересчета. Пусть, например, постоянная времени объекта равна 5 с, а запаздывание – 2 с. Период пересчета примем равным 0.2 с. При этом значение входа Tm должно быть равным 5/0.2 = 25, а значение входа Hm – 2/0.2 = 10.
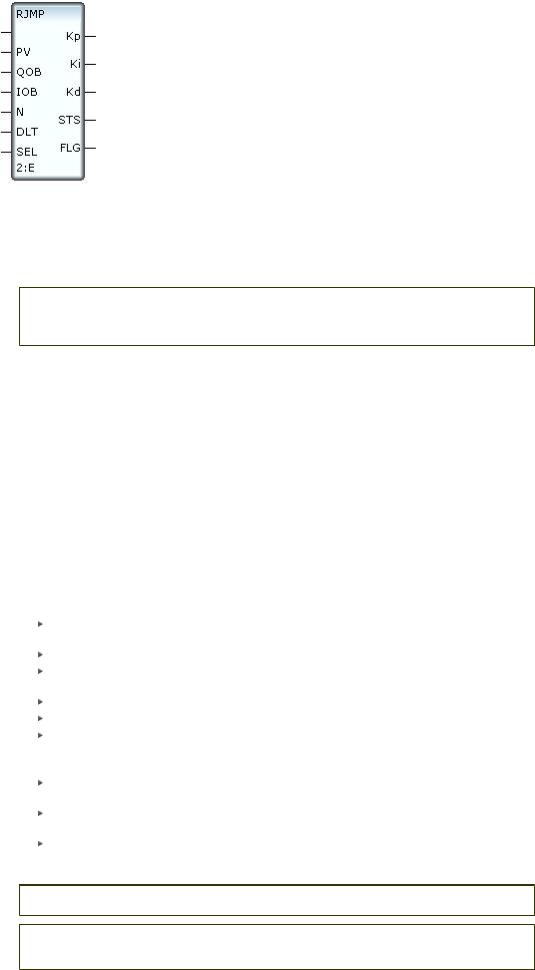
Настройка PID-закона по скачку сигнала задания (RJMP)
mk:@MSITStore:C:\Program%20Files\AdAstra%20Research%20Group\Trace%20M... 15.05.2014
Раздел ‘Регулирование’ |
Стр. 15 из 17 |
Этот блок вычисляет настройки ПИ/ПИД регулятора. Для этого он обрабатывает два массива данных: массив значений входа объекта и его выхода. Их накопление начинается при смене задания регулятора на величину, превышающую 6% (от этой величины зависит точность вычисления настроек регулятора). Накопление прекращается, когда объект перейдет в установившееся состояние. Это означает, что выход объекта заданное число раз (значение входа N) не отличается от задания на величину, заданную входом
DLT.
Этот блок работает в отладчике программ инструментальной системы, а также под управлением Adaptive Control МРВ, Adaptive Control Double Force МРВ и
Adaptive Микро TRACE MODE в реальном времени.
Входы блока имеют следующее назначение:
PV – задание. При его изменении более чем на 6% и FLG = 100 (установившееся состояние) начинается накопление массивов;
QOB – вход, контролирующий выход объекта управления;
IOB – на этот вход подается вход объекта управления (управляющее воздействие);
N– вход, задающий число тактов пересчета для определения установившегося состояния. По умолчанию (при равенстве входа 0) это число равно 60 (минимальное значение – 40);
DLT – вход, задающий максимальное отклонение выхода объекта от задания для определения установившегося состояния. По умолчанию (при равенстве входа 0) это значение равно 0.8 (максимальное значение – 5, минимальное – 0.1);
SEL – выбор типа закона: 1 - ПИД, 0 - ПИ;
Выходы данного блока используются следующим образом: Kp – коэффициент при пропорциональной составляющей; Ki – коэффициент при интегральной составляющей;
Kd – коэффициент при дифференциальной составляющей; STS – флаг результата последней обработки массивов:
0 – обработка массивов остановлена пользователем, т.е. в процессе обработки (значения от 99 до 1 на выходе FLG) пользователь изменил задание;
100 – успешное завершение обработки массивов;
101 – большое запаздывание объекта, но можно попытаться еще раз, минимизировав действие внешних возмущений в момент накопления массивов и увеличив скачок задания;
102 – много данных. Следует повторить настройку, увеличив период опроса;
103 – мало данных. Следует повторить настройку, уменьшив период опроса;
104 – отношение запаздывания к постоянной времени объекта не входит в допустимый диапазон (от 0 до 2), но можно попытаться еще раз;
FLG – флаг установившегося состояния объекта:
0 – объект не в установившемся состоянии, требуется либо дождаться этого состояния или скорректировать значения входов N и DLT;
100 – объект находится в установившемся состоянии, скачок по заданию приведет к накоплению массивов и вычислению новых настроек регулятора;
99 … 0 – идет обработка накопленных массивов. Значение 100 на этом выходе в момент переходного процесса свидетельствует о накоплении массивов, и когда объект войдет в установившееся состояние, значение входа будет уменьшаться до нуля.
Значения входов PV, QOB и IOB следует задавать в процентах.
Для получения более точных настроек следует проделать серию опытов по смене задания.
mk:@MSITStore:C:\Program%20Files\AdAstra%20Research%20Group\Trace%20M... 15.05.2014

Раздел ‘Регулирование’ |
Стр. 16 из 17 |
При смене задания в процессе накопления массивов данные продолжают накапливаться. Однако в этом случае коэффициенты регулятора не вычисляются.
Оптимальная обработка блоков в программе будет следующей: контроль выхода объекта, вычисление управляющего воздействия, пересчет.
Блок может использоваться и при ручном управлении объектом. В данном случае надо привести объект в установившееся состояние. Далее следует на входе PV установить значение входа QOB. Когда на выходе FLG появится 100, следует изменить задание и вручную подогнать объект к этому значению. После этого начнется обработка массивов и вычисление настроек регулятора.
mk:@MSITStore:C:\Program%20Files\AdAstra%20Research%20Group\Trace%20M... 15.05.2014
Раздел ‘Регулирование’ |
Стр. 17 из 17 |
mk:@MSITStore:C:\Program%20Files\AdAstra%20Research%20Group\Trace%20M... 15.05.2014