

Методичка_Теория_сигналов
.pdfвідліків вхідного сигналу. Розрахуємо за цим виразом вихідний сигнал, починаючи з відліку n 0 . Запишемо загальний вираз для y 0 :
0
y 0 x k .
k
Будемо вважати, що вхідний сигнал x n починається з моменту часу
початку сигналу t 0 , якому буде відповідати відлік |
x 0 . Всі відліки |
x n з |
|||||||||||||||
від’ємними номерами будемо вважати нульовими, отже |
|
|
|
|
|
|
|
||||||||||
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
y 0 x k |
x k x 0 6 . |
|
|
|
|
|
|
|
|||||||||
|
k |
|
|
|
|
k 0 |
|
|
y |
|
|
|
|
|
|||
Аналогічно, продовжимо для наступних відліків y 1 , |
|
2 |
|
, : |
|
||||||||||||
y 1 |
1 |
x |
|
k |
|
x |
|
0 |
|
x 1 6 5 1, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
k 0
2
y 2 x k x 0 x 1 x 2 6 5 1 2,
k 0
3
y 3 x k x 0 x 1 x 2 x 3 6 5 1 0 2.
k 0
Тут треба відмітити, що вхідний сигнал скінченний, отже всі його наступні відліки після x 2 будуть рівними нулю
4
y 4 x k x 0 x 1 x 2 x 3 x 4 6 5 1 0 0 2,
k 0
...
Видно, що оскільки вхідний сигнал скінченний, то всі наступні відліки вихідного сигналу суматора y n будуть рівними 2; вихідний сигнал буде
нескінченним. Графік перших п’яти відліків вихідного сигналу наведено на рисунку:
y[n]
7
6
5
4
3
2 






 1
1 


00 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
n
Відповідь: y n [6,1,2,2,2, ].
9
1.2.6.Розрахувати вихідний сигнал квадратора при подачі на вхід сигналу
xn 6, 5,1 .
Робота квадратора описується рівнянням y n x n 2 . Будемо розраховувати відліки сигналу по черзі:
y 0 x 0 2 62 36;
y 1 x 1 2 5 2 25;
y 2 x 2 2 12 1.
Зауважимо, що квадратор є нелінійною системою, оскільки для неї не виконується принцип суперпозиції.
Відповідь: y n 36,25,1 .
1.3. Задачі для самостійного опрацювання
1.3.1. |
Розрахувати |
|
|
вихідний |
сигнал |
дискретної |
системи, |
заданої |
||||||||||||||||||
різницевим |
рівнянням |
y |
|
n |
|
2x |
|
n |
|
4x |
|
|
|
|
5x |
|
n 4 |
|
при подачі |
на вхід |
||||||
|
|
|
|
|
|
n 1 |
|
|
||||||||||||||||||
сигналу x n 8, 3,2 . Побудувати графіки вхідного та вихідного сигналів. |
||||||||||||||||||||||||||
1.3.2. |
Розрахувати |
|
|
вихідний |
сигнал |
дискретної |
системи, |
заданої |
||||||||||||||||||
різницевим рівнянням |
y |
|
n |
3x |
|
|
|
|
|
|
5x |
|
n |
|
|
при подачі на вхід сигналу |
||||||||||
|
|
|
|
n 3 |
|
5 |
|
|||||||||||||||||||
x n 1, 1,5 . Побудувати графіки вхідного та вихідного сигналів.
1.3.3.Розрахувати вихідний сигнал суматора при подачі на вхід сигналу
xn 1,4, 3 .
1.3.4.Розрахувати вихідний сигнал суматора при подачі на вхід сигналу
xn 2,4,6,8 .
1.3.5. Розрахувати вихідний сигнал суматора при подачі на вхід
одиничного імпульсу u n |
1, |
n 0 |
. |
|
|||||||
|
n 0 |
|
|||||||||
|
|
|
|
|
|
|
|
0, |
|
|
|
|
|
|
|
1.3.6. |
Розрахувати |
вихідний сигнал системи осереднення зі зсувом, |
|||||
заданої різницевим рівнянням |
y n |
4 |
|||||||||
1 x n k при подачі на вхід сигналу |
|||||||||||
x |
|
n |
|
|
|
|
|
|
|
|
2 k 1 |
|
|
|
|
1, 4,5,1,9,3 . |
|
|
|
|
|||
10
1.3.7. Розрахувати вихідний сигнал системи осереднення зі зсувом,
заданої різницевим рівнянням |
|
y n |
|
2 |
|
|
|
|
|
при подачі на вхід сигналу |
|||||||||||||||||||||||||||||
|
1 x n k |
||||||||||||||||||||||||||||||||||||||
x |
|
n |
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
8 k 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,6,8,9,0, 6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
1.3.8. Розрахувати |
перші |
|
п’ять відліків |
вихідного |
сигналу дискретної |
||||||||||||||||||||||||||||||
системи, |
|
заданої |
|
різницевим |
|
рівнянням |
y |
|
n |
|
y |
|
|
x |
|
n |
|
x |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
n 1 |
|
|
|
n 1 при |
|||||||||||||||||||||||||||||
подачі на вхід сигналу x |
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
6,5,1 . Вважати, що система знаходиться в |
|||||||||||||||||||||||||||||||||||
стані спокою. Побудувати графік. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
1.3.9. Розрахувати перші п’ять відліків вихідного сигналу дискретної |
|||||||||||||||||||||||||||||||||||
системи, |
|
|
|
|
|
|
заданої |
|
|
|
|
|
|
різницевим |
|
|
|
|
|
|
|
рівнянням |
|||||||||||||||||
y |
|
n |
|
|
3y |
|
n |
5x |
|
n 2 |
3x |
n 4 |
|
при |
подачі |
на |
|
вхід |
сигналу |
||||||||||||||||||||
|
|
|
|
n 1 x |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
x |
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,2,3 . Вважати, що система знаходиться в стані спокою. Побудувати |
||||||||||||||||||||||||||||||||||||
графік.
1.3.10. Розрахувати вихідний сигнал системи, яка підносить кожний відлік вхідного сигналу до кубу, при подачі на вхід сигналу x n 1,2,3 .
11
2. Розрахунок вихідних сигналів дискретних систем на основі імпульсної характеристики
2.1. Основні теоретичні відомості
Послідовність h n називається імпульсною характеристикою дискретної
лінійної стаціонарної системи, якщо вона є реакцією системи на одиничний імпульс при нульових початкових умовах. Вихідний сигнал системи, яка описується імпульсною характеристикою, визначається за рівнянням згортки:
N N |
1 |
h n k , |
|
|
y n 1 2 |
x k |
|
|
|
k 0 |
|
|
|
|
де x n вхідний сигнал довжиною N1 |
відліків; |
|
|
|
h n імпульсна характеристика довжиною N2 відліків. |
|
|
||
При каскадному (послідовному) з’єднанні дві лінійні стаціонарні |
||||
дискретні системи з імпульсними характеристиками h1 n |
та |
h2 n можна |
||
замінити еквівалентною лінійною стаціонарною дискретною системою, імпульсна характеристика якої буде визначатися як згортка імпульсних характеристик двох систем:
h n h1 n h2 n .
При паралельному з’єднанні дві лінійні стаціонарні дискретні системи з імпульсними характеристиками h1 n та h2 n мають спільний вхід, а їх вихідні
послідовності додаються. Їх можна замінити еквівалентною лінійною стаціонарною дискретною системою, імпульсна характеристика якої дорівнює сумі імпульсних характеристик:
h n h1 n h2 n .
2.2. Приклади розв’язання типових задач
2.2.1. Розрахувати імпульсну характеристику системи, заданої різницевим рівнянням y n 2x n 3x n 1 4x n 3 . Побудувати графік.
За визначенням, імпульсна характеристика – це реакція системи на одиничний імпульс при нульових початкових умовах. Запишемо різницеве рівняння системи з позначеннями, які зазвичай використовуються:
h n 2 n 3 n 1 4 n 3 ,
де n – одиничний імпульс:
12
1, |
n 0, |
n |
n 0. |
0, |
Проведемо розрахунки кожного відліку реакції системи по черзі: n 0 : h 0 2 0 3 1 4 3 2 1 3 0 4 0 2;
n 1: h 1 2 1 3 0 4 2 2 0 3 1 4 0 3; n 2 : h 2 2 2 3 1 4 1 2 0 3 0 4 0 0; n 3: h 3 2 3 3 2 4 0 2 0 3 0 4 1 4; n 4 : h 4 2 4 3 3 4 1 2 0 3 0 4 0 0.
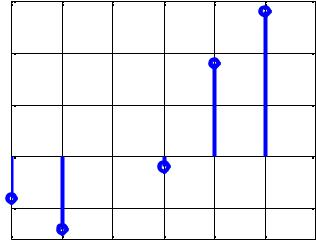
Всі наступні відліки імпульсної характеристики також дорівнюють нулю. Видно, що імпульсна характеристика такої нерекурсивної системи є
скінченною. Графік імпульсної характеристики наведено на рисунку:
h[n]
5
4 


3
2
1
0  -1 -2 -3
-1 -2 -3 


|
-40 |
1 |
2 |
3 |
4 |
|
|
|
n |
|
|
Відповідь: імпульсна характеристика h n 2, 3,0,4 . |
|
||||
2.2.2. Розрахувати перші п’ять відліків імпульсної характеристики |
|||||
системи, |
заданої |
|
|
різницевим |
рівнянням |
y n 2 y |
n 1 x n 4x n 1 5x n 3 . Побудувати графік. |
||||
Імпульсна характеристика – реакція системи на одиничний імпульс при нульових початкових умовах. Перепишемо різницеве рівняння у зручному для розрахунків вигляді
y n x n 4x n 1 5x n 3 2 y n 1
та з використанням зі звичайними позначеннями h n та n :
h n n 4 n 1 5 n 3 2h n 1 .
Будемо розраховувати значення імпульсної характеристики рекурсивно, враховуючи те, що система є рекурсивною:
n 0 : h 0 0 4 1 5 3 2h 1 1 0 0 0 1. 13
Тут використано те, що для того, щоб реакція системи була саме імпульсною характеристикою, необхідно, щоб система знаходилася в стані спокою, отже h 1 0 . Виконаємо подальші розрахунки:
n 1: h 1 1 4 0 5 2 2h 0 0 4 1 5 0 2 1 2.
Тут використано те, що значення h 0 2 було отримано на
попередньому кроці розрахунків.
n 2 : h 2 2 4 1 5 1 2h 1 0 4 0 5 0 2 ( 2) 4; n 3: h 3 3 4 2 5 0 2h 2 0 4 0 5 1 2 ( 4) 3; n 4 : h 4 4 4 3 5 1 2h 3 0 4 0 5 0 2 ( 3) 6.
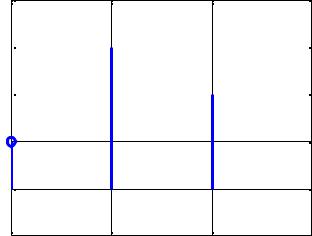
Видно, що імпульсна характеристика такої системи буде нескінченною, але за умовою потрібно було розрахувати лише п’ять перших відліків: h n 1, 2, 4, 3, 6 , графік наведено на рисунку:
h[n]
2
1
0  -1 -2
-1 -2 


-3 

 -4
-4 

 -5 -6
-5 -6 


-70 |
1 |
2 |
3 |
4 |
5 |
|
|
|
n |
|
|
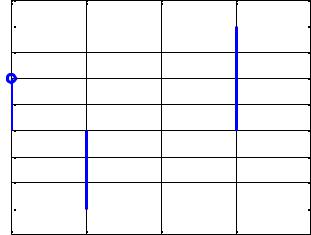
2.2.3. Розрахувати вихідний сигнал системи, заданої імпульсною характеристикою h n 1,3,2 при подачі на вхід сигналу x n 4,5, 6,7 .
Побудувати графіки вхідного та вихідного сигналів.
Побудуємо графік вхідного сигналу x n :
14
4
3 


2 


x[n]
1
0 
-10 |
1 |
2 |
3 |
|
|
n |
|
Для розрахунку вихідного сигналу системи, яка задана своєю імпульсною характеристикою, скористаємося рівнянням згортки:
N N |
1 |
|
|
|
|
y n 1 2 |
x k h n k . |
|
|
|
|
k 0 |
|
|
y n |
|
|
Довжина |
вихідного |
сигналу |
буде |
дорівнювати |
|
N1 N2 1 4 3 1 6 відліків. |
Розрахуємо |
значення вихідного сигналу, |
|||
починаючи з першого: |
|
|
|
|
|
6
n 0 : y 0 x k h k x[0]h[0] x[1]h[ 1] ... x[0]h[0] 4 1 4.
k 0
Тут варто відмітити, що значення відліків сигналу та відліків імпульсної характеристики з від’ємними номерами вважаються рівними нулю.
6
n 1: y 1 x k h 1 k x[0]h[1] x[1]h[0] x[2]h[ 1] ...
k 0
4 3 5 1 0 7;
6
n 2 : y 2 x k h 2 k x[0]h[2] x[1]h[1] x[2]h[0] x[3]h[ 1] ...
k0
4 2 5 3 ( 6) 1 0 1;
6
n 3: y 3 x k h 3 k x[0]h[3] x[1]h[2] x[2]h[1] x[3]h[0]
k0
x[4]h[ 1] ... 0 5 2 ( 6) 3 7 1 0 1;
6
n 4 : y 4 x k h 4 k x[0]h[4] x[1]h[3] x[2]h[2] x[3]h[1]
k0
x[4]h[0] ... 0 0 ( 6) 2 7 3 0 9.
Вцьому виразі значення x 4 вважається рівним нулю, оскільки вхідний
сигнал x n є скінченним і має всього чотири відліки з номерами від 0 до 3.
15
6
n 5: y 5 x k h 5 k x[0]h[5] x[1]h[4] x[2]h[3] x[3]h[2]
k0
x[4]h[1] ... 0 0 0 7 2 0 14;
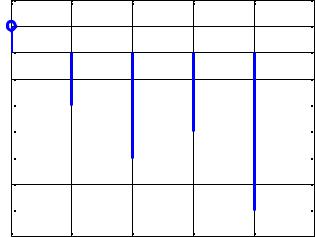
Усі інші відліки вихідного сигналу будуть дорівнювати нулю; видно, що реакція системи на такий вхідний сигнал буде скінченною і рівною
y n 4, 7,1, 1,9,14 . Побудуємо графік вихідного сигналу y n :
15
10
5 y[n]
0 
-5
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
Відповідь: вихідний сигнал системи y n 4, 7,1, 1,9,14 . |
||||||||
|
|
|
|
|
2.2.4. Задані дві системи з імпульсними характеристиками h1 n 1,2,3 |
||||||||
та |
h2 |
n 4,5, 6 . Розрахувати вихідний сигнал при подачі на вхід сигналу |
|||||||||||
x |
|
n |
|
|
|
|
при послідовному з’єднанні цих систем. |
|
|||||
|
|
1, 3,0,2 |
|
|
|||||||||
Відомо, що дві системи, які з’єднані послідовно, можна замінити одною системою, яка буде перетворювати сигнал так само. Імпульсна характеристика еквівалентної системи, що складається з двох послідовно з’єднаних систем, розраховується як згортка імпульсних характеристик цих систем:
hекв n h1 n h2 n .
16
x[n] |
|
h1 n |
y'[n] |
h2 n |
|
y[n] |
||
|
|
|
|
|
||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
x[n] |
|
|
|
y[n] |
||||
|
h n h1 n h2 n |
|
||||||
|
|
|
|
|
|
|
|
|
б)
Послідовне з’єднання систем
Розрахуємо спочатку імпульсну характеристику еквівалентної системи за виразом
5
hекв n h1 k h2 n k .
k 0
5
hекв 0 h1 k h2 0 k h1 0 h2 0 h1 1 h2 1 h1 5 h2 5
k0
1 4 2 0 3 0 0 0 0 0 0 0 4,
5
hекв 1 h1 k h2 1 k h1 0 h2 1 h1 1 h2 0 h1 5 h2 4
k0
1 5 2 4 3 0 0 0 0 0 0 0 3,
5
hекв 2 h1 k h2 2 k h1 0 h2 2 h1 1 h2 1 h1 5 h2 3
k0
1 6 2 5 3 4 0 0 0 0 0 0 8,
5
hекв 3 h1 k h2 3 k h1 0 h2 3 h1 1 h2 2 h1 5 h2 2
k0
1 0 2 6 3 5 0 4 0 0 0 0 3,
5
hекв 4 h1 k h2 4 k h1 0 h2 4 h1 1 h2 3 h1 5 h2 1
k0
1 0 2 0 3 6 0 5 0 4 0 0 18,
5
hекв 5 h1 k h2 5 k h1 0 h2 5 h1 1 h2 4 h1 5 h2 0
k0
1 0 2 0 3 0 6 0 0 5 0 4 0 0 0,
17
Очевидно, що всі подальші відліки характеристики будуть рівні 0. Тобто імпульсною характеристикою еквівалентної системи є hекв 4, 3, 8,3,18 .
Маючи значення вхідного сигналу та імпульсної характеристики, виконаємо розрахунок вихідного сигналу на основі рівняння згортки:
8
y n hекв k x n k :
k 0
8
y 0 hекв k x 0 k hекв 0 x 0 hекв 1 x 1 hекв 8 x 8
k0
4 1 3 0 8 0 3 0 18 0 0 0 0 0 0 0 0 0 4,
8
y 1 hекв k x 1 k hекв 0 x 1 hекв 1 x 0 hекв 8 x 7
k0
4 3 3 1 8 0 3 0 18 0 0 0 0 0 0 0 0 0 9,
8
y 2 hекв k x 2 k hекв 0 x 2 hекв 1 x 1 hекв 8 x 6
k0
4 0 3 3 8 1 3 0 18 0 0 0 0 0 0 0 0 0 1,
8
y 3 hекв k x 3 k hекв 0 x 3 hекв 1 x 2 hекв 8 x 5
k0
4 2 3 0 8 3 3 1 18 0 0 0 0 0 0 0 0 0 19,
8
y 4 hекв k x 4 k hекв 0 x 4 hекв 1 x 3 hекв 8 x 4
k0
4 0 3 2 8 0 3 3 18 1 0 0 0 0 0 0 0 0 33,
8
y 5 hекв k x 5 k hекв 0 x 5 hекв 1 x 4 hекв 8 x 3
k0
4 0 3 0 8 2 3 0 18 3 0 1 0 0 0 0 0 0 38,
8
y 6 hекв k x 6 k hекв 0 x 6 hекв 1 x 5 hекв 8 x 2
k0
4 0 3 0 8 0 3 2 18 0 0 3 0 1 0 0 0 0 6,
8
y 7 hекв k x 7 k hекв 0 x 7 hекв 1 x 6 hекв 8 x 1
k0
4 0 3 0 8 0 3 0 18 2 0 0 0 3 0 1 0 0 36,
Очевидно, що всі подальші відліки будуть рівні 0. Графік вихідного сигналу наведено на рисунку:
18