

ДКРФІОТ
.pdfпохідною від цих незалежних одиниць. Сила в 1Н дорівнює силі, яка надає тілу масою в 1 кг прискорення в 1 м/с2.
Третій закон – закон рівності дії і протидії
Дві матеріальні точки діють одна на одну з силами, рівними за величиною і протилежними за напрямками, по одній лінії дії.
Цей закон визначає властивість сил взаємодії між двома матеріальними
точками незалежно від системи координат.
Четвертий закон – закон незалежності дії сил (суперпозиції)
Прискорення матеріальної точки від дії системи сил дорівнює векторній сумі прискорень від дії кожної сили зокрема.
Цей закон стверджує що між діючими на матеріальну точку силами немає взаємного впливу відносно прискорень. Тобто, якщо прискорення від
|
|
|
|
|
|
дії сили |
Fi |
з системи n |
сил, діючих на матеріальну точку, дорівнює |
ai , то |
|
|
|
|
|
|
|
саме прискорення точки |
ai визначається як векторна сума прискорень від дії |
||||
всіх сил: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
ai . |
|
Цей результат випливає з аксіоми статики про паралелограм сил.
Плоский, або плоскопаралельний рух твердого тіла у кожну мить складається з поступального руху разом з центром мас і обертального навколо центра мас. Застосовуючи для вивчення плоского руху твердого тіла теореми про рух центра мас і про зміну момента кількості руху відносно осі, що проходить через центр мас тіла і
11
перпендикулярно до площини, параельно якої відбувається рух, будемо використовувати рівняння плоского руху твердого тіла.
В проекціях на осі координат дістанемо три диференціальних рівняння плоского руху твердого тіла:
mxc Fixe ; |
myc Fiye ; |
I z M
Перші два рівняння характеризують поступальну, а третє рівняння
– обертальну частину плоского руху. Кількість рівнянь руху відповідає кількості степенів вільності, які має тверде тіло, що знаходиться у плоскому русі.
Принцип Даламбера (метод кінетостатики)
Система сил, що діє на матеріальну точку або механічну систему, в
загальному випадку є неврівноваженою.
Принцип Даламбера дає можливість врівноважити систему сил: для невільної матеріальної точки в кожний момент часу сума активних сил, що прикладені до точки, реакції в язів і сил інерції дорівнює нулю:
|
|
|
|
|
|
|
F |
R 0 , |
|
|
|
|
|
|
|
|
|
де F, – рівнодійні активних сил і сил інерції, прикладених до точки; |
R |
– |
|||
реакція в язів. |
|
|
|
|
|
|
Тобто рівняння руху записується у вигляді умови рівноваги статики. |
|
|||
|
|
|
|
|
|
|
Силою інерції – матеріальної точки називається вектор, |
який |
|||
дорівнює за модулем добутку маси точки на її прискорення і спрямований у бік,
протилежний прискоренню точки: |
|
|
. Її називають даламберовою |
Ф m а |
|||
силою інерції.
12

Для механічної системи як сукупності матеріальних точок, на кожну з яких діє врівноважена за Даламбером, система сил, принцип Даламбера має вигляд:
n |
|
n |
|
n |
|
|
Fi |
A Ri |
i |
0 |
|||
i 1 |
|
i 1 |
|
i 1 |
|
|
n |
|
|
n |
|
|
|
M 0 ( |
Fi |
A ) M 0 ( |
Ri ) |
|||
i 1 |
|
|
i 1 |
|
|
|
n
M 0 (Фi ) 0 .
i 1
Принцип Даламбера дає єдиний метод складання диференційних рівнянь руху невільних систем. Застосування цього принципу для розв язання задач динаміки методами рівноваги сил статики називається методом кінетостатики.
Приведення сил інерції
Сили інерції для кожного тіла системи приводяться окремо. Головний
|
тіла дорівнює добутку маси тіла М на |
|||
вектор сил інерції твердого |
||||
прискорення його центра мас аС |
і спрямований у бік, протилежний цьому |
|||
|
|
|
|
|
прискоренню M aC |
|
|
|
|
|
|
|
|
|
а) Поступовий рух – |
сили інерції приводяться до ФС , який прикладено у |
|||
центрі мас тіла; |
|
|
|
|
б) Плоский рух твердого тіла (тіло має площину матеріальної симетрії, яка співпадає з площиною руху) – сили інерції приводяться до головного вектора
|
|
|
і |
головного моменту |
|
ін |
І zc |
|
С |
М аС |
М |
с |
. Тут: знак ― – ‖ означає, що |
||||
момент |
пари |
сил інерції спрямований |
у бік, протилежний кутовому |
|||||
прискоренню тіла , ас – прискорення центра мас.
в) Обертальний рух твердого тіла:
- при приведенні до центра мас системи:
- при приведенні осі обертання сила буде прикладена до осі обертання z і
головний момент М i I Z , I Z момент інерції відносно осі обертання.
13
Якщо центр маси системи лежить на осі обертання, то сили інерції
приводяться тільки до пари M i .
Принцип можливих переміщень (принцип Лагранжа)
Можливим переміщенням системи називається сукупність
нескінченно малих переміщень точок системи, що допускаються на даний,
фіксований момент часу в язами. Вони мають наступні властивості:
1)нескінченно мале S переміщення точок системи;
2)уявні, а не дійсні переміщення точок системи, хоч в певних випадках нескінченно малі дійсні переміщення можуть бути можливими;
3)переміщення, які можна в принципі реалізувати, не порушуючи зв’язків.
Кількість незалежних між собою можливих переміщень системи і
називається кількістю ступенів свободи цієї системи.
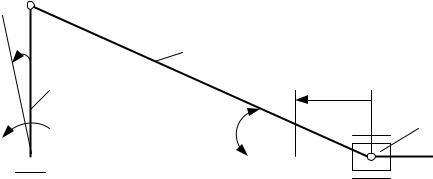
Точці, яка лежить на поверхні, можна надати два незалежних можливих переміщення, наприклад, вздовж двох осей, як показано на рисунку. Будь-яке третє можливе переміщення можна виразити через ці два,
тобто вона має два ступені свободи.
A
|
|
2 |
|
|
|
|
|
|
|
|
1 |
|
|
X3 |
|
ω |
30 |
o |
3 |
|
|
|
A
 B
B  P
P
Система має один ступінь свободи, тому що залежить від х3 і
навпаки.
Можливо роботою сили називається елементарна робота, яку могла б виконати сила на переміщенні точки, що співпадає з можливим:
14
|
|
F S . |
А F r |
||
Для сили, яка обертає тіло, ця робота: A M Z (F ) .
В язі називаються ідеальними, якщо можлива робота реакцій в язів на будь-якому можливому переміщенні системи дорівнює нулю:
n
Ri rS 0.
i 1
Ідеальні в язі: шарнір, поверхня, невагомий стержень, ідеальна нитка
– без урахування сил тертя.
Сили, які не є реакціями зв’язків, називаються активними.
Принцип можливих переміщень: для рівноваги системи з ідеальними в язами необхідно і достатньо, щоб сума елементарних робіт усіх активних сил, що діють на систему, на будь-якому можливому переміщенні системи з даного положення дорівнювала нулю:
n |
n |
|
|
|
Aia Fi |
Si 0 |
|
||
i 1 |
i 1 |
|
|
|
n |
|
|
|
|
або Fi Si cos(Fi , Si ) |
0 ; |
|||
i 1 |
|
|
|
|
n |
|
|
|
|
або (Fxi xi |
Fyi yi |
Fzi |
Zi ) 0 . |
|
i 1
Принцип можливих переміщень дає у загальній формі умови рівноваги для будь-якої механічної системи, тоді як умови рівноваги статики розглядають рівновагу кожного тіла системи відокремлено.
Загальне рівняння динаміки
Загальне |
рівняння |
динаміки випливає з принципу Даламбера |
- |
|
русі системи з ідеальними в язами сума робіт усіх |
|
|
Лагранжа: при |
F a |
||
|
|
|
|
активних сил і сил інерції |
Ф усіх точок системи на будь-якому її можливому |
||
переміщенні дорівнює нулю, тобто
15
|
n |
|
n |
|
|
|
|
A(Fi a ) A(Фі ) |
0 , |
|
|||
|
i 1 |
|
i 1 |
|
|
|
n |
|
|
Фiy yi FiZa ФiZ zi 0 , |
|||
або Fixa Фix xi Fyia |
||||||
i 1 |
|
|
|
|
|
|
n |
|
Fiya mi yi |
yi |
|
mi zi zi 0 , |
|
або (Fix |
mi xi ) xi |
FiZ |
||||
i 1
де Fix , Fiy , Fiz проекції активних сил на осі декартових координат, x, y, z –
проекція прискорення і-ї точки системи; xi yi , zi – проекції можливих перміщень точки на ті самі осі координат.
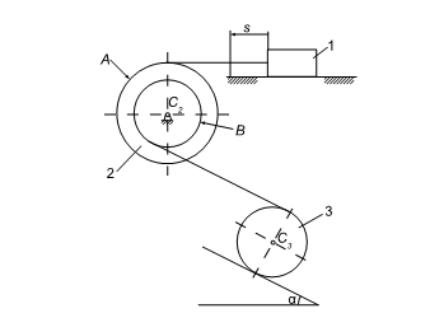
Можливі підходи до отримання рівнянь руху розглянемо на наступному прикладі. Тіло 1 (брусок) може рухатись вздовж горизонтальної шорсткої поверхні. До кінця бруска прикріплено кінець невагомої нерозтяжної нитки,другий кінець якого намотано на поверхню А подвійного блока 2, що обертається навколо нерухомої вісі С2 . На поверхню В того ж блока намотано іншу невагому нерозтяжну нитку, другий кінець якої намотано на поверхню котка 3. Останній котиться без ковзання по похилій площині, яку встановлено під кутом 450 до горизонту (рис. 1.1.).
16
|
|
|
Рисунок 1.1 |
|
|
|
|
||
Вихідні данні: Маса бруса 1 |
m1 m m const , блока 2 – m2 |
1,5m , котка 3 |
|||||||
– m |
3 |
2m . Радіус поверхні |
А блока 2 R |
2 |
10 см, поверхні |
В – r |
0,5R |
2 |
; |
|
|
|
|
2 |
|
|
|||
радіус інерції блока 2 i2 7 |
см. Радіус котка 3 R3 10 см. |
Коток вважати |
|||||||
суцільним однорідним циліндром. Коефіцієнт тертя ковзання між брусом 1 та опорною поверхнею f 0,3. Коефіцієнт тертя кочення котка по похилій площині 0,5 см. Іншими опорами нехтувати.
Система починає рух із стану спокою. Через деякий час брусок 1
проходить шлях s 1,2 м.
Знайти: швидкість v1 бруса 1 в кінці цього шляху.
17
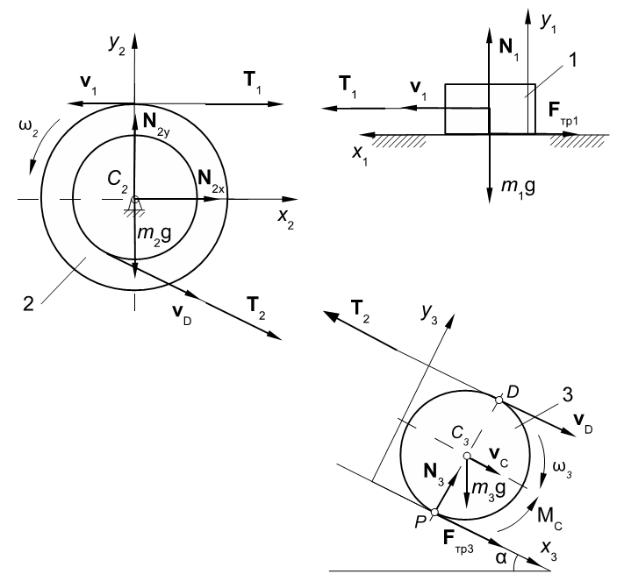
1.1 Застосування загальних теорем динаміки
Розрахункову схему наведено на рисунку 1.2. Розглянута система має одну степінь вільності.
Рисунок 1.2
Розпочнемо із складання рівнянь руху кожного з тіл системи із застосуванням загальних теорем динаміки про рух центра мас та про зміну кінетичного моменту.
18
|
Брусок 1 (дивись рисунок 1.2) рухається поступально. Рівняння руху |
|
отримаємо з теореми про рух центру мас. |
|
|
|
|
|
|
На тіло діють сила тяжіння m1 g , сила реакції поверхні |
N , сила тертя |
|
|
|
Fтр1 |
та сила T1 тяги нитки. Рівняння руху центру мас (чи просто – тіла, |
|
оскільки при поступальному русі швидкості всіх точок однакові) в векторній формі має вигляд:
|
|
|
|
|
|
|
|
|
|
dv |
|
|
|
||||
m |
1 |
m g |
N |
F |
|
T |
||
|
|
|||||||
1 |
|
1 |
|
1 |
тр1 |
1 . |
||
|
dt |
|
|
|
|
|
|
|
Проектуючи це рівняння на осі x1 , y1 , отримаємо |
|
|
||||||
x 1: m |
dv1 |
T F |
;. |
|
||||
|
|
|||||||
|
|
1 |
dt |
|
1 |
тр1 |
|
|
y 1: 0 N1 m1g.
Силу тертя ковзання Fтр1 визначаємо за законом Кулона:
Fтр1 fN1 ,
де f – заданий коефіцієнт тертя. З рівняння (2) визначаємо
N1 m1g
тому
Fтр1 fm1 g.
Підставляючи цей вираз до рівняння (1), отримаємо
(1)
(2)
m |
dv1 |
T |
fm g |
. |
(3) |
|
|
||||||
1 |
dt |
|
1 |
1 |
||
|
|
|
|
|
|
|
Блок 2 обертається навколо |
нерухомої осі |
C2 (дивись рисунок 1.2). |
||||
Центр мас співпадає з віссю обертання, отже, залишається нерухомим. На
тіло діють наступні сили: сила T1 на тяжіння нитки, що з’єднує блок з брусом
|
|
(рівна за величиною і протилежна за напрямком до сили T1 , що діє на брусок |
|
|
|
1), сила T2 натяжіння нитки, що з’єднує блок 2 з котком 3, сила тяжіння |
m2 g |
19
і, нарешті, сила |
N 2 реакції |
осі |
обертання, |
що представлена на рисунку |
|
складовими N 2 x |
та N 2 y . |
|
|
|
|
За теоремою про рух центру мас, враховуючи нерухомість останнього, |
|||||
отримаємо: |
|
|
|
|
|
|
|
|
|
|
0 . |
|
T1 T2 |
m2 g |
N2 |
||
Впроекціях на осі x2 , y2 отримаємо
x2 : T1 T2 cos N2 x 0;.
y 2 : T2 sin m2 g N2 y 0.
Ці рівняння можуть бути використані для визначення сил реакції N 2 x та N 2 y ,
але оскільки вони не становлять інтересу для даної задачі, надалі їх розглядати не будемо.
На підставі теореми про зміну кінетичного моменту запишемо рівняння
обертального руху блоку відносно осі C2 :
I |
|
dω2 |
M |
|
F , |
|
|
|
|
|
|
|
|
|
C2 |
|
|
C2 |
i |
(4) |
|
dt |
|
||||
де IC2 – момент інерції блоку відносно осі обертання; ω2 |
– кутова швидкість |
|||||
|
|
|
– головний момент зовнішніх сил, прикладених до блоку. |
|
|||||
блоку; |
MC |
Fi |
|
||||||
|
|
2 |
|
|
|
|
|
|
|
Момент інерції блока знайдемо через заданий радіус інерції: |
|
||||||||
|
|
|
I |
C2 |
m i2. |
(5) |
|||
|
|
|
|
|
2 2 |
|
|
||
Оскільки нитка є нерозтягненною і не просковзує по поверхні блока, то |
|||||||||
кутова швидкість ω2 пов’язана зі швидкістю v1 : |
|
||||||||
|
|
|
|
ω |
|
|
v1 |
. |
(6) |
|
|
|
|
2 |
|
||||
|
|
|
|
|
|
R2 |
|||
|
|
|
|
|
|
|
|
||
Нарешті, моменти (додатний напрямок відліку моментів співпадає з додатним напрямком кутової швидкості. Останній, як і напрямки
20