

Раздел 2. Регулирование координат электропривода
Тема 2.1. Основные показатели регулирования координат и типовые структуры электропривода
ЭП осуществляет не только преобразование электрической энергии в механическую, но и управление рабочим процессом приводимого в движение механизма.
Технологические требования определяют необходимость с требуемой точностью поддерживать на заданном уровне те или иные механические переменные ЭП (скорость рабочего органа, ускорение, момент, или усилие, развиваемые двигателем); принудительно изменять эти переменные в процессе управления технологическим процессом; ограничивать переменные на заданном уровне. Таким образом, управление технологическим процессом и реализация ограничений на допустимые нагрузки технологического оборудования определяют необходимость регулирования координат ЭП.
В зависимости от задач управления механизмом, регулирование координат осуществляется с целью:
Поддержания заданного уровня переменной.
Изменения переменной по требуемому закону.
Ограничение переменной предельно допустимым значением.
4) Отработка произвольного закона движения с заданной точностью (следящий привод).
Возможные способы управления переменными делятся на две большие группы:
Параметрические способы управления, которые реализуются в разомкнутых системах.
Способы автоматического регулирования координат с использованием обратных связей.
Под параметрическим управлением понимают изменения заданного уровня регулируемой переменной путем установки нового значения параметра двигателя, от которого зависит его механическая характеристика.
Параметрические способы управления широко применяются в ЭП благодаря простоте их реализации, однако их недостатком является низкая точность регулирования координат.
В связи с совершенствованиям технологии требования к точности регулирования постоянно растут, поэтому области применения разомкнутых ЭП сужаются, а замкнутых – постоянно расширяются.
В ЭП применяются замкнутые системы с регулированием по отклонению и комбинированные системы (по отклонению и возмущению)
Основные показатели регулирования координат ЭП
Точность регулирования переменных ЭП определяется возможными её отклонениями от заданного значения под действием возмущающих факторов

Рис. 2.1
Точность регулирования оценивается как отношение наибольшего отклонения к среднему значению координаты:
![]() (2.1)
(2.1)
Следует
отметить, что количественная оценка
точности зависит от среднего значения
уровня регулируемой переменной и
определяется конкретными пределами
изменения возмущения
![]() .
.
Диапазон регулирования
Характеризует пределы изменений средних значений переменных достижимые при данном способе регулирования.
 (2.2)
(2.2)
При определении диапазона D можно использовать не только среднее значение, но и значение переменной при определенном возмущении.
Верхнее значение диапазона регулирования ограничивается максимально реализуемыми значениями переменной, допустимыми для двигателя.
Нижний предел диапазона регулирования ограничивается требуемой точностью при данном способе регулирования.
Плавность регулирования – характеризуется числом дискретных значений регулируемого параметра, реализуемых при данном способе регулирования.
Очень важным дополнительным показателем регулирования скорости является допустимая нагрузка при регулировании (условия нагрузки).
Необходимость оценки допустимой нагрузки возникает в связи с тем, что при регулировании скорости, нагрузка приводимого механизма в общем случае не является постоянной, а также зависит от скорости (Рис 2.2).

Рис. 2.2 Зависимости мощности и момента нагрузки от скорости.
Известно, что регулирование скорости можно осуществлять при постоянном моменте (за счет изменения напряжения якоря ДПТ) или при постоянной мощности P=const (за счет изменения потока возбуждения).
Поэтому для полного использования двигателя по мощности способ регулирования скорости должен соответствовать условию изменения нагрузки.
5) Экономичность регулирования.
Применение регулируемого ЭП связано с повышенными первоначальными затратами на систему регулирования и эксплуатационными расходами. При принятии решения о применении регулируемого ЭП необходимо провести технико-экономическое сравнение вариантов.
При автоматическом регулировании координат учитываются
следующие показатели качества регулирования:
1.Характер переходного процесса (рис. 2.3)
2 3

Х Хуст
4
1
t
Рис. 2.3 Кривые переходных процессов.
На рис. 2.3 обозначены следующие виды переходных процессов:
1 – апериодический переходный процесс; 2 – апериодический процесс с перерегулированием; 3 – колебательный; 4 – монотонный.
Быстродействие системы характеризуетсяся следующими временами переходного процесса:
![]() – время переходного процесса – время
от начала переходного процесса до
момента попадания переменной в зону
– время переходного процесса – время
от начала переходного процесса до
момента попадания переменной в зону
![]() 5%
от ее установившегося значения – Хуст.
5%
от ее установившегося значения – Хуст.
![]() – время
регулирования или время установления
– время, когда регулируемая переменная
впервые достигает уровня установившегося
значения.
– время
регулирования или время установления
– время, когда регулируемая переменная
впервые достигает уровня установившегося
значения.
![]() –
время, за которое регулируемая переменная
впервые достигла максимального значения.
–
время, за которое регулируемая переменная
впервые достигла максимального значения.
Перерегулирование – выраженное в процентах отношение максимального значения отклонения регулируемой величины:
 (2.3)
(2.3)
Перерегулирование характеризует плавность протекания переходного процесса. Иногда перерегулирование недопустимо по технологическим требованиям.
Колебательность переходного процесса.
Рассматривается как отношение двух соседних максимумов колебательного процесса:
 (2.4)
(2.4)
Число полных колебаний регулируемой величины за время переходного процесса.
Типовые структуры замкнутых систем управления координатами ЭП
Структура с суммирующим усилителем (рис. 2.4).

Рис. 2.4 Структура с суммирующим усилителем.
На рис. 2.4 обозначено: ПрУ – преобразовательное устройство;
ДУ – двигательное устройство; ПУ – передаточное устройство (редуктор);
ИО – исполнительный орган; K1- K4 – коэффициенты обратных связей.
Особенностью структуры является наличие на входе системы одного суммирующего усилителя (СУ), на вход которого подаётся как сигнал задания – Xзад, так и сигналы всех обратных связей. Этот суммирующий усилитель, по сути, выполняет роль управляющего устройства ЭП.
Технически суммирующие усилители могут быть реализованы :
Путем магнитного суммирования сигналов, поступающего на обмотки ЭМУ, МУ.
Электрическим суммированием сигналов (Рис. 2.5):

Рис. 2.5 Электрическое суммирование сигналов.
Построением СУ на основе операционного усилителя.
Операционный усилитель (ОУ) представляет собой усилитель напряжения с большим коэффициентом усиления (сигналы на входе усиливаются в сотни тысяч раз), охваченный глубокой отрицательной обратной связью через сопротивление Rос (Рис. 2.6):

Рис. 2.6 СУ на основе операционного усилителя
В
результате, коэффициент усиления
![]() ОУ определяется только отношением
сопротивлений обратной связиRос
к входному Rвх.
ОУ определяется только отношением
сопротивлений обратной связиRос
к входному Rвх.
 (2.5)
(2.5)
Цифровой суммирующий усилитель (сумматор)- алгебраически суммирует на входе код сигнала задания и код сигналов ОС. На выходе цифрового сумматора имеется код разности входных сигналов.
Особенности структуры системы с СУ:
Простота технологической реализации;
Высокое быстродействие;
Возможность получения различных по качеству ПП и различных статических характеристик за счет введения ОС с отсечкой.
ОС с отсечкой начинает действовать тогда, когда ее сигнал превышает уровень отсечки, до этого он будет равным нулю.
Недостатки структуры системы с СУ::
- невозможность регулирования отдельных координат, поскольку они все взаимосвязаны;
- сложность синтеза ОС и настройки системы;
- необходимость проверки устойчивости системы;
- сложность ограничения промежуточных координат.
2. Структура с независимым регулированием координат.
В данной структуре (рис.2.7) для каждой регулируемой переменой установлен отдельный регулятор. Разделение процессов регулирования производится во времени таким образом, чтобы в каждый момент времени работал только один контур регулирования. Это позволит независимо обеспечить для каждой переменной заданные статические и динамические показатели.
Подобные структуры относятся к классу систем с переменной структурой. Они содержат логическое переключающее устройство ЛПУ, которое переключает контуры регулирования в зависимости от времени или по заданной программе.
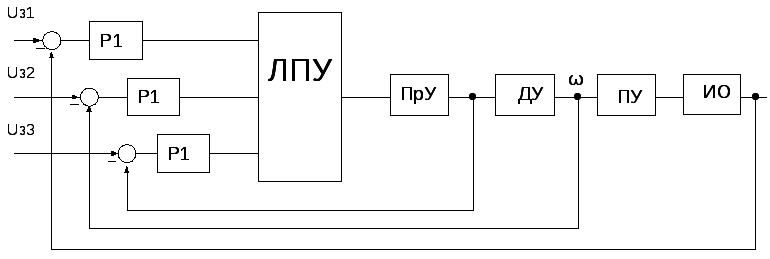
Рис. 2.7 Структура с независимым регулированием координат.
На рис. 2.7 обозначены: ЛПУ – логическое переключающее устройство; Р1-Р3 – регуляторы.
Достоинства структуры с независимым регулированием координат:
- возможность независимо регулировать каждую координату.
Недостатки структуры:
- сложность технической реализации ЛПУ;
- относительная сложность синтезу регулятора, который должен компенсировать сразу несколько постоянных времени объекта.
3. Структуры с подчиненным регулированием координат (СПР).
СПР строится таким образом, что для каждой регулируемой переменной имеется свой локальный регулятор в виде последовательного корректирующего звена (рис. 2.8).
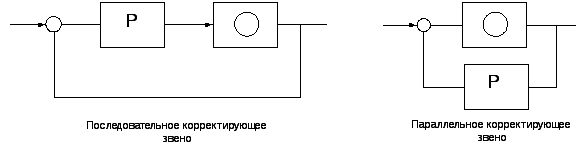
Рис. 2.8 Последовательное и параллельное корректирующие звенья.
Выход регулятора является заданием на внутренний контур регулирования. Таким образом, внутренний контур регулирования подчинен внешнему.
Задачей регулятора в системе СПР является:
Компенсация «большой» постоянной времени в контуре регулирования;
Обеспечения не только устойчивости, но и заданного качества ПП;
Обеспечения ограничения координат подчиненного контура;
Обеспечения заданной статической характеристики данного контура;
Создания условий работы внешнего контура за счет придания замкнутому внутреннему контуру передаточной функции стандартного вида.
На рис.2.9 приведена структура двухконтурной СПР регулирования скорости. Она содержит внутренний контур регулирования тока с регулятором тока РТ и внешний контур регулирования скорости с регулятором скорости РС.

Рис. 2.9 Двухконтурная СПР регулирования скорости.
На рис. 2.9 обозначены: Кт, Кс – коэффициенты обратной связи по току и скорости.
Достоинства систем СПР:
- стандартные настройки контуров регулирования, обеспечивающие заранее известный переходный процесс в контуре и стандартный регулятор;
- простой аналитический расчет регуляторов, начиная с внутреннего контура.
Недостатки:
- быстродействие СПР уменьшается с увеличением числа контуров регулирования в системе.
Литература: 1, с. 213-218, с. 232-234; 2, с. 396-399.
СРС: Определение статизма системы. Астатические системы.
Литература: 1, с. 213-218, с. 232-234; 2, с. 396-399.
Контрольные вопросы:
1.Приведите основные показатели регулирования координат ЭП.
2. Приведите типовые структуры замкнутых систем ЭП.
3. На каких принципах реализуют суммирующие усилители?
4. Каковы задачи регулятора в системе СПР?
5. Назовите достоинства и недостатки систем СПР.
ЛЕКЦИЯ 13
Стандартные настройки контуров СПР
Настроить
контур СПР - это значит, таким образом
выбрать передаточную функцию регулятора
![]() в контуре, чтобы обеспечить стандартную
переходную характеристику в замкнутом
контуре.
в контуре, чтобы обеспечить стандартную
переходную характеристику в замкнутом
контуре.
Настройку СПР начинают с внутреннего контура регулирования. Контур регулирования СПР с единичной обратной связью представлен на рис. 2.10.
Wp.c.(p)
Xвых.
Wp(p) W0(p)










Рис. 2.10 Контур регулирования СПР
На
рис. 2.10 обозначено:
![]() ,
,![]() Wр.с.(р)
– передаточные функции объекта
регулирования, регулятора и разомкнутой
системы.
Wр.с.(р)
– передаточные функции объекта
регулирования, регулятора и разомкнутой
системы.
Объект
регулирования в контуре
![]() ,
как правило, имеет одну большую постоянную
времени
,
как правило, имеет одну большую постоянную
времени![]() и несколько малых постоянных времени.
Пусть передаточная функция объекта
регулирования имеет вид:
и несколько малых постоянных времени.
Пусть передаточная функция объекта
регулирования имеет вид:
 ,
(2.6)
,
(2.6)
где
![]() –
коэффициент передачи объекта регулирования;
–
коэффициент передачи объекта регулирования;
![]() –
малая постоянная времени.
–
малая постоянная времени.
При
синтезе регулятора малые постоянные
времени объединяются в одну и заменяються
одним апериодическим звеном с малой
некомпенсируемой постоянной времени
![]()
 (2.7)
(2.7)
Если объект имеет несколько больших постоянных времени, то его разбивают обратными связями на несколько контуров.
В задачу регулятора контура системы СПР входит компенсация большой постоянной времени Т0 и коэффициента усиления объекта , а также, формирование желаемой или стандартной динамики контура.
Различают две основные настройки СПР:
Настройка контура на модульный (технический или экономический) оптимум (МО). Эта настройка контура обеспечивает в полосе рабочих частот замкнутого контура модуль частотной характеристики близкий к единице.
При настройке на МО желаемая передаточная функция разомкнутой системы при единичной обратной связи имеет вид:
 (2.8)
(2.8)
Если обратная связь в контуре регулирования не единична, то числитель (2.8) принимают равным обратному значению коэффициента обратной связи в контуре
Желаемая логарифмическая амплитудная характеристика (ЛАХ) разомкнутого контура имеет вид, приведенный на рис. 2.11:
20lgK
-20![]()



![]()
![]()
![]()
lg
ω 0


Рис. 2.11 Желаемая ЛАХ разомкнутого контура при настройке на МО.
Передаточная функция желаемого замкнутого контура:
𝜉=
![]()
Переходная функция (реакция на скачок задания) желаемого замкнутого контура будет иметь вид, представленный на рис. 2.12.

![]()
δ
1
τ
![]()
Рис. 2.12 Переходная характеристика контура, настроенного на МО.
При
настройке контура на МО время регулирования
составляет
![]() ,
перерегулирование
,
перерегулирование![]() .
.
Необходимая передаточная функция регулятора находится аналитически:
 (2.10)
(2.10)
Поскольку контур имеет высокое демпфирование, то его передаточную функцию можно упростить, пренебрегая малым коэффициентом при старшей степени:
 (2.11)
(2.11)
Недостатки настройки контура на МО: контур имеет статизм по возмущающему воздействию.
Настройка контура СПР на симметричный оптимум (СО).
Настройка контура на СО применяется для устранения статической ошибки в контуре регулирования. С этой целью в передаточную функцию желаемой разомкнутой системы вводится дополнительное интегрирующее звено:
 (2.12)
(2.12)
ЛАХ разомкнутого контура симметрична относительной частоты среза, (рис. 2.13), чем и обусловлено название настройки.
Желаемая передаточная функция замкнутого контура:
 (2.13)
(2.13)

Рис. 2.13 Желаемая ЛАХ разомкнутого контура при настройке на СО.
П
![]()


δ
1


![]()
τ
Рис. 2.14 Переходная характеристика контура, настроенного на СО.
При
настройке контура на СО время регулирования
составляет
![]() ,
перерегулирование
,
перерегулирование![]() .
.
Для устранения значительного перерегулирования на входе контура устанавливается апериодический фильтр с постоянной времени 4Тµ:
 (2.14)
(2.14)
После установки фильтра (2.14)контур становится существенно задемпфированым и передаточную функцию замкнутого контура можно представить:
 (2.15)
(2.15)
Достоинства настройки контура СПР на СО: отсутствие статической ошибки по возмущению в контуре и то, что переходный процесс по возмущению определяется только малыми постоянными времени.
Недостатком настройки является то, что быстродействие контура снижается вдвое по сравнению с настройкой на МО.
Литература: 1, с. 242-255; 2, с. 442-453.
СРС: Альтернативные настройки систем СПР.
Литература: 1, с. 242-255; 2, с. 442-453.
Контрольные вопросы:
1.Зависит ли переходная характеристика контура СПР от его параметров?
2. Как определить передаточную функцию регулятора системы СПР?
3. Каковы показатели качества при настройке контура на МО?
4. Каковы показатели качества при настройке контура на СО?
5. Назовите достоинства и недостатки настроек систем СПР.
ЛЕКЦИЯ 14