РОБОТОТЕХНОЛОГИЧЕСКИЕ
КОМПЛЕСЫ
Д.т.н., профессор Ланин В.Л. |
Кафедра Электронной |
|
техники и технологии |

Виды РТК и их характеристика
•Робототехнологический комплекс (РТК) включает робот или группу роботов, станок, агрегат или группу однотипного технологического оборудования. При организации РТК выделяют активную рабочую зону и несколько вспомогательных зон, связанных с подачей и удалением заготовок
иизделий, обслуживанием робота.
•Производственная площадь So, занимаемая оборудованием, определяется по формуле, где L — суммарная длина основного оборудования вдоль фронта; a
— расстояние от стены или колонны до рабочего места; h1 — проход между оборудованием; b — ширина основного технологического оборудования; h2
— расстояние между рядами оборудования.
•Рациональность структуры РТК оценивается по коэффициенту использования производственной площади:
a n Sо i SвспL 0,5 h1 bSо 0,5 h2
K S i 1 S

Структура РТК
где n — количество единиц технологического оборудования; Sо i — площадь, занимаемая основным оборудованием; Sвсп — площадь,
занятая вспомогательным оборудованием и роботами; S — площадь здания.
РТК включает: автоматическое технологическое оборудование (автоматы); робототехническое транспортное оборудование (роботы- манипуляторы, транспортные роботы и др.); автоматические загрузочные и разгрузочные устройства; управляющие устройства (пульты управления, микроЭВМ).
Площадь, занятая промышленным роботом,
где k — коэффициент, учитывающий площадь, необходимую для эксплуатации, профилактики и ремонта ПР (1,2—1,5); LПР — длина
ПР; h3 — величина прохода; bПР — ширина ПР.
SПР k LПР h3 bПР
Компоновка РТК
При компоновке РТК возможные два варианта:
1) ПР встраивается в существующую технологическую линию, когда требуется большая универсальность робота и наличие у него элементов адаптации; 2)ПР проектируется как составная часть сборочного технологического оборудования.
Второй вариант наиболее рационален и перспективен, поскольку позволяет в максимальной степени использовать преимущества модульного принципа построения ПР. Оборудование может располагаться вокруг ПР или устанавливаться в линию.

Компоновка по дуге окружности
:
. Компоновка РТК по дуге окружности предусматривает расстановку оборудования 1, 2, 3 по дуге, описываемой захватом робота 4. Такая компоновка применяется для выполнения последовательных технологических операций: лужения, отмывки, рихтовки, гибки, контроля параметров ЭРЭ.

Компоновка по линейке оборудования
Компоновка РТК по линейке предусматривает размещение оборудования в линию, а робот снабжен модулем перемещения между транспортными конвейерами 5. Транспортные операции перемещения реализуются с помощью транспортного робота, а операции загрузки и разгрузки отдельных видов технологического оборудования — с помощью роботов- манипуляторов.

Вертикальная компоновка РТК
Автоматизация транспортных работ может осуществляться с помощью подвесных ПР серии М, к преимуществам которых относятся: малая занимаемая площадь, большая зона обслуживания, удобство доступа к оборудованию. Подвесные ПР построены на базе унифицированных модулей транспортного перемещения, направляющей (монорельс) с модулем пневмоэлектропитания, исполнительных органы, комплекта сменных захватов.

Подвесной робот типа МАРС
Подвесной робот МАРС имеет 4 степени подвижности, 2 руки и грузоподъемность 1,0 кг.

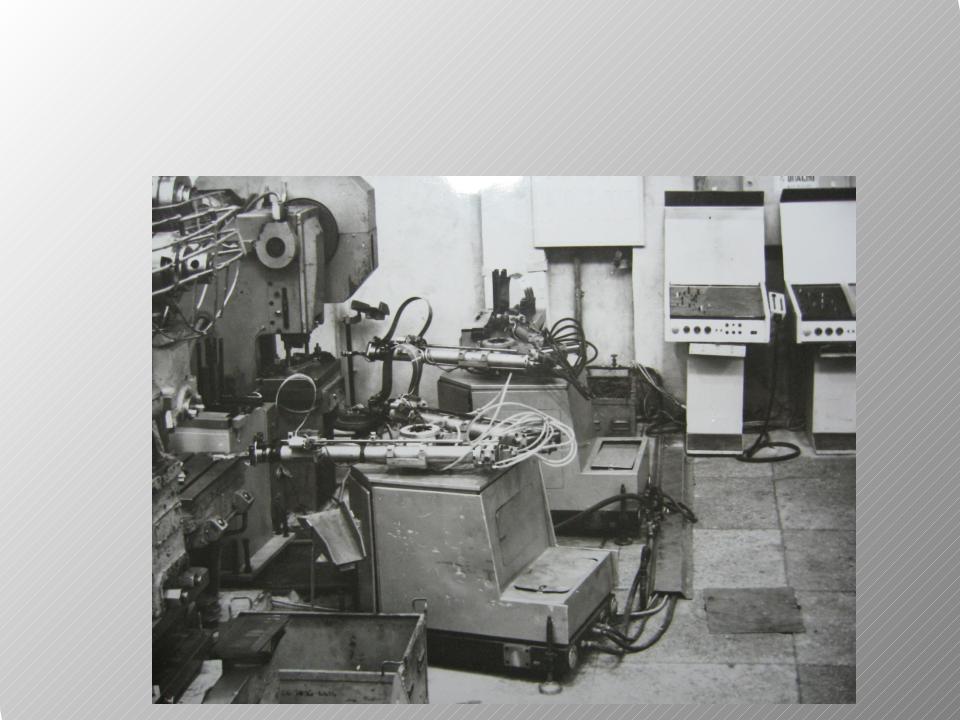
Примеры РТК на производстве
РТК штамповки с планировкой по дуге окружности.
Вцентре робот “РИТМ- 01.02” с пятью степенями подвижности, двумя руками
игрузоподъемностью до 0,5 кг. Время рабочего цикла 3- 5 с.