

РОБОТЫ И ИХ ХАРАКТЕРИСТИКИ
Д.т.н., профессор Ланин В.Л. |
Кафедра Электронной |
|
техники и технологии |
Виды промышленных роботов и их характеристика
•Робот - это автоматический манипулятор с программным управлением.
•В зависимости от участия человека в процессе управления роботами их
|
подразделяют на биотехнические, автономные, полуавтоматические и |
|
автоматические. |
• |
К биотехническим относятся дистанционно управляемые роботы, |
|
копирующие движения человека и имеющие средства обратной связи. |
|
Автономный робот может длительно работать без участия человека. |
|
Полуавтоматический робот характеризуется сочетанием ручного и |
|
автоматического управления. Он снабжен устройством управления для |
|
вмешательства человека в процесс автономного функционирования путем |
|
сообщения дополнительной информации или последовательности действий. |
Поколения роботов
Роботы первого поколения (программные роботы) имеют жесткую ( цикловую) программу действий и элементарную обратную связь с окружающей средой или не имеют ее.
Роботы второго поколения (адаптивные роботы) обладают координацией движений с восприятием. Они пригодны для малоквалифицированного труда при изготовлении изделий. Программа работы робота требует для реализации движений управляющей ЭВМ и программного обеспечения для обработки сенсорной информации и выработки управляющих воздействий.
Роботы третьего поколения обладают способностью к обучению и адаптации в процессе решения производственных задач и способны вести диалог с человеком, формировать в себе модель внешней среды, распознавать и анализировать сложные ситуации.
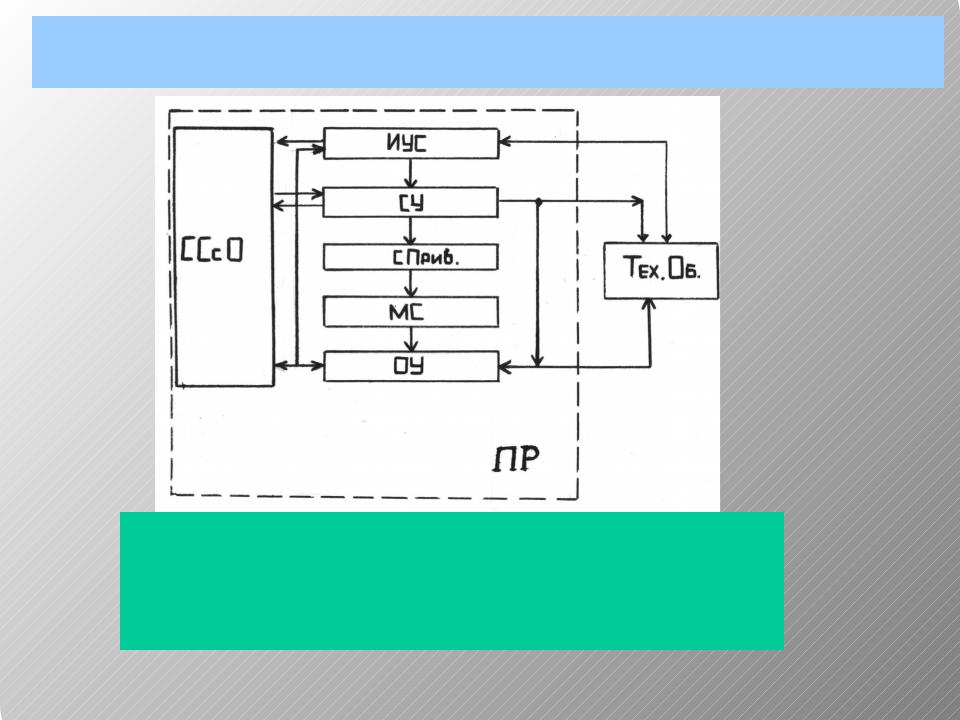
Структурная схема ПР
ССс О- система связи с оператором, ИУС – информационно-управляющая система. СУ – система управления, МС - механическая система, ОУ – операционное устройство

Основные технические показатели роботов
1.Число степеней подвижности — сумма возможных координационных движений объекта манипулирования относительно опорной системы. Простые роботы- манипуляторы имеют две степени подвижности, сложные — шесть.
2. Грузоподъемность руки — наибольшая масса груза, перемещаемого при заданных условиях, например скорости и т. д. ПР подразделяются на сверхлегкие (до 1 кг), легкие (1—10 кг), средние (10—200 кг), тяжелые (200—1000 кг).
3: . Рабочая зона — пространство, в котором при работе может находиться рука манипулятора 4. Погрешность позиционирования — отклонение заданной позиции исполнительного
механизма от фактической при многократном повторении: |
n |
X i |
/ k |
x |
|
||
|
i 1 |
|
|
где Xi — отклонение координаты; k — количество повторений. |
|
||
ПР с малой точностью позиционирования и погрешностью более 1,0 мм выполняют транспортные операции, операции окраски, сварки. Средняя точность 0,1—1,0 мм в удовлетворяет требованиям, предъявляемым к обслуживанию технологического оборудования. ПР с высокой точностью позиционирования (менее 0,1 мм) используют для выполнения сборочных работ.
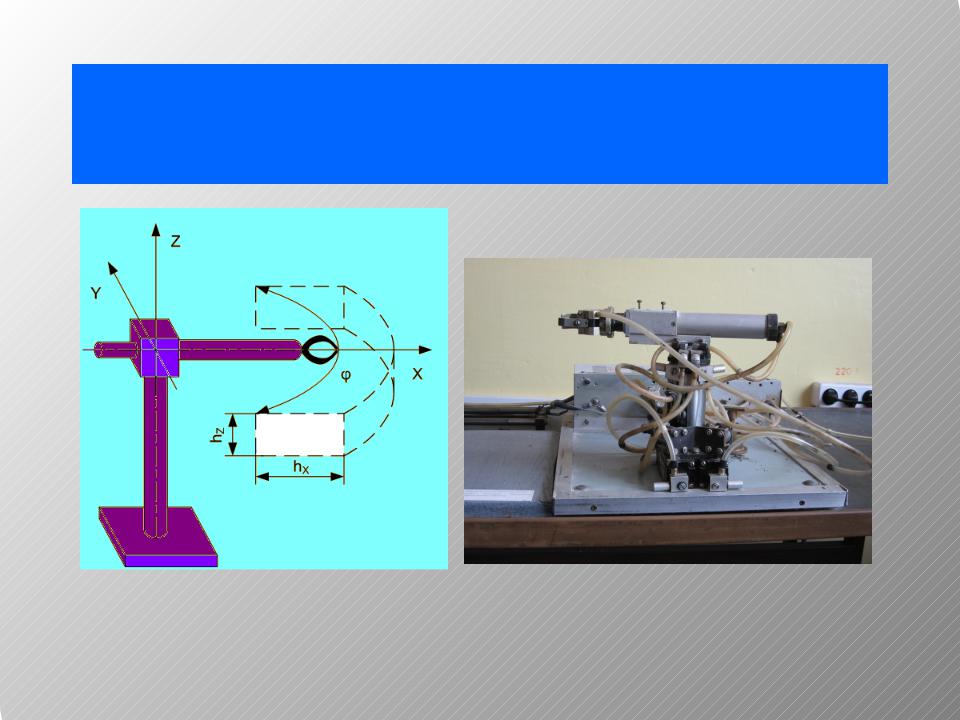
Рабочая зона ПР
Параметры промышленных роботов
5. Скорость перемещения конечного звена манипулятора, которая определяет быстродействие. Малое быстродействие при скорости перемещения до 0,5 м/с характерно для гидравлических ПР средней и большой грузоподъемности. Среднее быстродействие (до 1,0 м/с) соответствует средней скорости движения руки человека и основной массе ПР, используемых для автоматизации производственных процессов. Высокое быстродействие (более 1,0 м/с) используется для ограниченного типоразмера роботов вследствие значительных механических трудностей их создания и эксплуатации.
6. Системы управления ПР подразделяются на цикловые, позиционные, контурные и комбинированные.
При цикловом управлении программируются последовательность движений и интервалы времени между циклами.
Позиционное управление позволяет программировать независимые перемещения по осям координат в произвольные точки рабочей зоны манипулятора
Захватные устройства роботов- манипуляторов
Механический захват: 1 – груз; 2 – планка; 3 – пружина; 4 – рычаг Просты по конструкции и надежны в работе, однако характеризуются
низкой универсальностью, сложностью переналадки и возможностью повреждения поверхности изделия
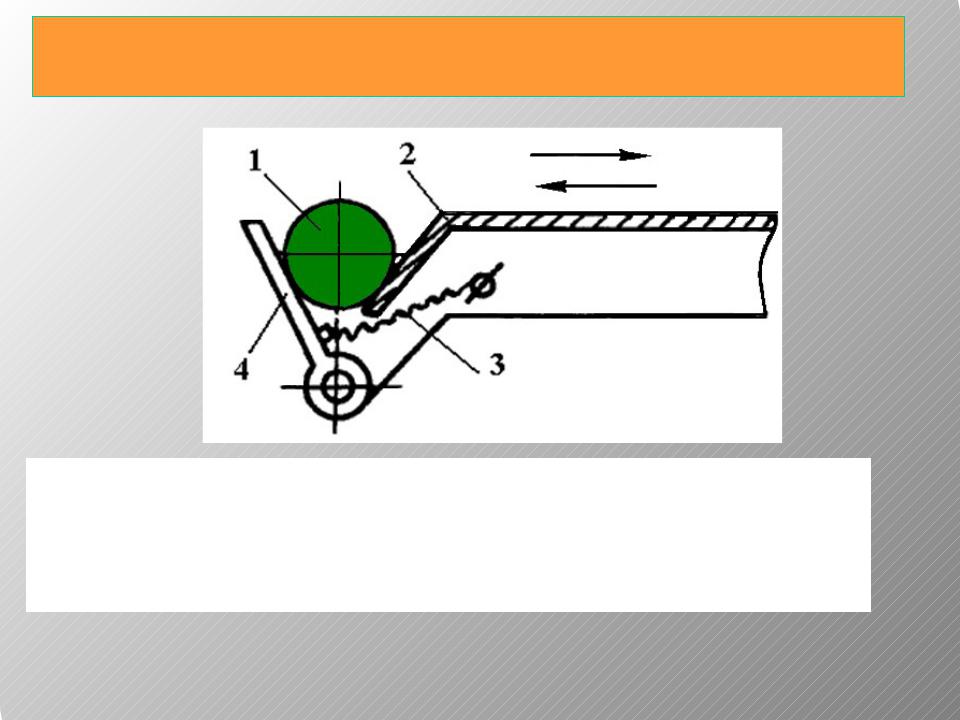
Захватные устройства ПР
Вакуумный захват состоит из трубки 1, которая в нижней части переходит в раструб в виде колокола, и шарикового клапана 2. При нажатии на плоскость изделия раструб распрямляется в кольцо, при этом воздух, находящийся в полости колокола вытесняется через клапан, и изделие присасывается к захвату. Усилие определяется по формуле, где k — коэффициент негерметичности (0,8— 0,85); Sп—площадь поверхности,
|
ограниченной кольцом; Ри — избыточное |
|||
|
давление, |
равное |
разности |
между |
|
атмосферным и давлением в вакуумной |
|||
F k Sп Pи |
полости приспособления (0,1·105 Па). |
|||
Преимущества- удобство поштучного отделения |
||||
груза, отсутствие |
сосредоточенных сил |
|||
зажима, |
недостатки: |
малая |
||
|
грузоподъемность, необходимость |
сплошной |
||
|
гладкой поверхности деталей. |
|
||
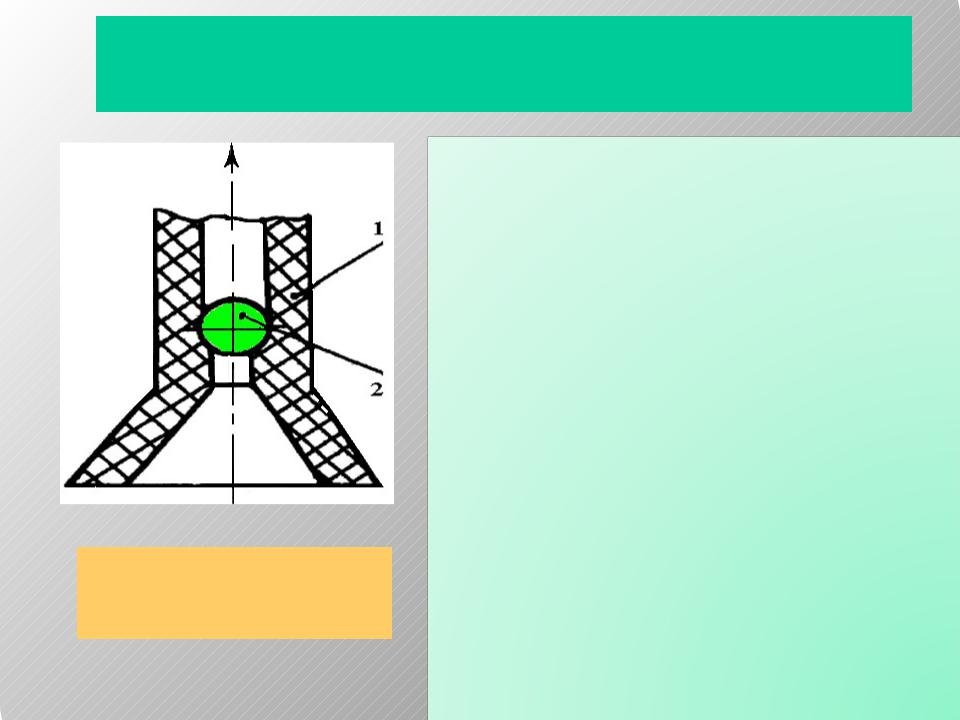
Пневматический захват
Пневматические захваты основаны на использовании камерных элементов, просты по конструктивному исполнению и надежны в работе. При захватывании объектов сжатый воздух по шлангам 1 подается в баллоны- губки 3, которые захватывают объект. Изменением давления сжатого воздуха достигается регулировка усилия, удерживающего объект. Пневматический захват может удерживать объекты, имеющие различные размеры и массу.