

4.1 Структура адаптивной системы управления
При рассмотрении программной и адаптивной систем управления роботом можно заметить, что они отличаются только устройствами, воспринимающими информацию о внешней среде (рис. 4.3).

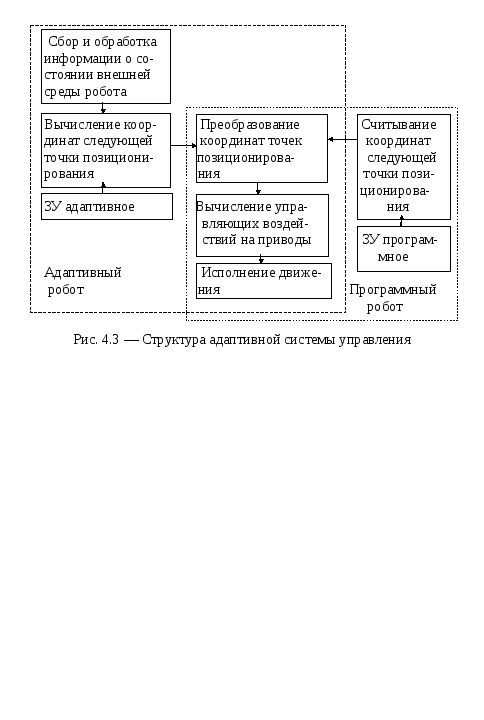
Таким образом, в адаптивном роботе дополнительно присутствует информационная система и устройство для вычисления координат следующий точки позиционирования. Используется также информация об изменениях внешней среды и информация об изменениях компонент робота. Управление адаптивным роботом осуществляет вычислительное устройство, сложность которого определяется уровнем адаптации робота. Для сложных адаптивных робототехнических систем вычислительное устройство представляется мультимикропроцессорной сетью.
4.2 Программное обеспечение адаптивных роботов
Программное обеспечение адаптивных роботов обеспечивает обслуживание внешних устройств, которыми по отношению к системе управления являются человек-оператор, приводы робота, информационная система, технологическое оборудование и ЭВМ верхнего уровня. Структура программного обеспечения адаптивного робота показана на рис. 4.4.

В режиме активного диалога человека-оператора с системой управления человек осуществляет следующие действия:
формирует и редактирует рабочую программу;
создает объектный и загрузочный модули рабочей программы, следит за состоянием файлов и программ в библиотеке;
отлаживает рабочую программу;
обеспечивает контроль исправности оборудования включая каналы связи с технологическим оборудованием, а также калибрует измерительные системы робота. Помимо организации диалога в управлении поведением программное обеспечение осуществляет интерпретацию директив:
пооператорное выполнение исходной программы (директивы);
выявление и реализация смысла программы или какой либо ее части;
перевод с одного языка в другой.
Функции программного обеспечения по отношению к исполнительному устройству-манипулятору выглядят следующим образом:
подробный анализ задания;
разбиение задания на подзадачи и элементарные действия;
планирование движения инструмента или захватного устройства для реализации этих действий;
определение последовательности точек позиционирования;
преобразование координат точек позиционирования инструмента в требуемое положение сочленений манипулятора и формирование команд управления приводами;
поддержка программным обеспечением робота информационного обмена с верхним по отношению к нему уровнем управления;
решение общесистемных задач по обработке сигналов прерываний по управлению вводом-выводом информации и распределению вычислительных ресурсов.
Необходимо отметить, что функции программного обеспечения адаптивного робота сходны с функциями операционных систем реального времени. Это позволяет при проектировании систем управления роботов использовать опыт, накопленный в области теории универсальных операционных систем.
4.3 Системы очувствления роботов
Адаптивные роботы по сравнению с программными обладают большей эффективностью и оснащаются информационными системами для сбора данных о внешней среде и оценки состояния компонент устройств управления и манипулятора.
Информационные системы адаптивных роботов можно разделить по функциональному назначению на две группы: [2]
Системы очувствления контактного типа:
силомоментные;
тактильные.
Системы бесконтактного типа:
технического зрения;
локационные.
Для оценки состояния манипулятора существуют датчики положения, скорости и крутящего момента.