

3.2. Конечные автоматы
Конечным автоматом называется пятерка
A= (Q,q0,F),
где Q= {q0,q2, …,qn}– конечное множество состояний устройства управления;
{a1,a2, …,ak} – конечный входной алфавит;
– функция переходов, отображающая
Q![]() во
множество подмножеств множестваQ;
во
множество подмножеств множестваQ;
q0 – начальное состояние устройства управления;
F– множество заключительных состояний, причемFQ.
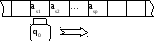
Конечный автомат можно представить себе следующим образом. На бесконечной ленте с ячейками записана входная цепочка символов *; управляющее устройство с читающей головкой движется слева направо и считывает символы с ленты. После перехода к новой ячейке, управляющее устройство попадает в новое состояние, определяемое функцией переходов. На рисунке изображен автомат в начальном состоянии, считывающий первый символ входной цепочки {as1,as2, … ,asp}.
Конфигурацией конечного автомата называется пара (q,), гдеqQ– состояние устройства управления, а*– неиспользованная часть входной цепочки. Такт автомата определяется на конфигурациях. Например, если(q1,a) содержитq2, то, выполнив такт, автомат перейдет от конфигурации (q1,a) к конфигурации (q2,). Используя бинарное отношение, обозначаемое символом├, указанный выше такт можно записать следующим образом:
(q1,a)├ (q2,).
Это говорит о том, что если конечный автомат находится в состоянииq1 и входная головка обозревает входной символа, то автомат может делать такт, за который он переходит в состояние,q2 и сдвигает головку на одну ячейку вправо.
Входная цепочка допускается автоматом, если найдется последовательность тактов, переводящая автомат из начальной конфигурации (q0,) в заключительную (qf,), здесьqf – некоторое заключительное состояние,пустая цепочка.
Конечный автомат называется детерминированным, если множество (q,a) содержит не более одного состояния для любыхqQиaЕсли множество(q,a) содержит более одного состояния, то автомат называется недетерминированным.Единственное отличие недетерминированного конечного автомата от детерминированного заключается в том, что значениями функции переходов являются не состояния, а множества состояний (или,в терминах команд, возможны различные команды с одинаковыми левыми частями). Это соответствует тому факту, что в диаграмме состояний из одной вершины может исходить несколько дуг с одинаковой пометкой.
Рассмотрим конечный детерминированный автомат А1, допускающий все цепочки из символов 0 и 1, которые начинаются и оканчиваются 1. А1=({p,q,r}, {0, 1},,p, {r}), гдезадается следующей таблицей.
-
Состояние
Вход
0
1
p
-
{q}
q
{q}
{r}
r
{q}
{r}
Функцию переходов можно задать с помощью диаграммы.
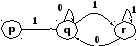
Функцию переходов можно задать с помощью команд:
(p, 1) =q;(q, 0) =q;(q, 1) =r;(r, 0) =q;(r, 1) =r.
Для входа 1001 единственно возможной последовательностью конфигураций, начинающейся конфигурацией (p, 1001), будет
(p, 1001)├ (q, 001)
├ (q, 01)
├ (q, 1)
├ (r,)
Таким образом 1001 допускается автоматом А1.
Рассмотрим конечный недетерминированный автомат А2, допускающий все цепочки из символов 0 и 1, которые оканчиваются цепочкой 010. А1=({s1,s2,s3,s4}, {0, 1},,s1, {s4}), гдезадается следующей диаграммой.

|
| ||
|
Состояние |
Вход | |
|
|
0 |
1 |
|
s1 |
{s1, s2} |
{s1} |
|
s2 |
- |
{s3} |
|
s3 |
{s4} |
- |
|
s4 |
- |
- |
Функцию переходов можно задать с помощью таблицы.
Эквивалентность языков, определяемых праволинейной грамматикой и конечным автоматом.
Рассмотрим теперь произвольную автоматную грамматику G = (N, , P, S) с правосторонними продукциями:
C → xB, или C → x, где C, B N, x *.
Построим для нее недетерминированный конечный автомат
A = (Q,q0,F),
где алфавиты в грамматике и автомате совпадают;Q=N{D}, причем символD не должен содержаться в N, q0=S,F= {D}, аопределяется следующим образом:
каждой продукции вида C → xставится в соответствие команда(C,x) =D;
каждой продукции вида C → xBставится в соответствие команда(C,x) =B;
других команд нет.
Ввиду того, что любой регулярный язык может быть порожден автоматной грамматикой с правосторонними продукциями, можно ограничиться рассмотрением именно таких грамматик.
Пример. Пусть грамматикаG = (N, , P, S) задается следующим образом:
N= {S,L}, = {a,b, 0, 1},
P= {S→aL,S→bL,S→a,S→b,L→aL,L→bL,
L→0L,L→1L,L→a,L→b,L→0,L→1}.
Построим для нее конечный автомат
A = (Q,q0,F),
= {a,b, 0, 1},Q= {S,L}{D},q0=S,F= {D},
(S, a) = L; (S, b) = L; (S, a) = D; (S, b) = D; (L, a) = L; (L, b) = L;
(L, 0) = L; (L, 1) = L; (L, a) = D; (L, b) = D; (L, 0) = D; (L, 1) = D;
Теперь рассмотрим произвольный недетерминированный конечный автомат
A = (Q,q0,F).
Такому автомату можно поставить в соответствие следующую автоматную грамматику:
G = (N, , P, S),
где алфавиты в грамматике и автомате совпадают;N =Q,S = q0, а множествоР строится следующим образом:
каждой команде автомата (qi, aj ) = qk ставится в соответствие продукцияqi→ ajqk, еслиqi,qk Q,aj;
каждой команде (qi, aj ) = qk ставится в соответствие еще одна продукцияqi→ aj, еслиqk F;
других продукций нет.
Рассмотрим конечный детерминированный автомат А1, допускающий все цепочки из символов 0 и 1, которые начинаются и оканчиваются 1. А1=({p,q,r}, {0, 1},,p, {r}), гдезадается следующими командами:
(p, 1) =q;(q, 0) =q;(q, 1) =r;(r, 0) =q;(r, 1) =r;
этому автомату поставим в соответствие следующую автоматную грамматику
G = (N, , P, S),
={0, 1}, N ={p, q, r}, S = p,
P = {p→ 1q; q→ 0q; q→ 1r; q→ 1; r→ 0q; r→ 1r; r→ 1 }