

Норма матрицы
Проблема собственных значений определена только для квадратных матриц. В экономической практике часто необходимо оценивать не только квадратные матрицы. Для такой оценки можно использовать универсальное понятие нормы, справедливое для матриц любой размерности.
Нормой
произвольной
матрицы А называется действительное
число
![]() ,
удовлетворяющее целому ряду условий,
наиболее важными из которых являются:
,
удовлетворяющее целому ряду условий,
наиболее важными из которых являются:
1.
![]() ,
причем
,
причем![]() только в случае полностью нулевой
матрицыА.
только в случае полностью нулевой
матрицыА.
2.
![]() ,
где
,
где![]() .
.
В
какой–то степени норму![]() можно образно представлять как показатель
“толщины” или “мощности” матрицыА.
можно образно представлять как показатель
“толщины” или “мощности” матрицыА.
Норма
называется канонической,
если
![]()
![]() ,
т.е. она не меньше, по модулю, любого
элемента матрицыА.
При выборе нормы возможно использовать
самые разнообразные соображения, не
противоречащие определению. Однако на
практике обычно достаточно следующих
канонических норм:
,
т.е. она не меньше, по модулю, любого
элемента матрицыА.
При выборе нормы возможно использовать
самые разнообразные соображения, не
противоречащие определению. Однако на
практике обычно достаточно следующих
канонических норм:
1.
m–норма
![]() – суммируются, по модулю, всестроки
матрицы А
и максимальная из полученных сумм
объявляется нормой.
– суммируются, по модулю, всестроки
матрицы А
и максимальная из полученных сумм
объявляется нормой.
2.
l–норма
![]() – суммируются, по модулю, всестолбцы
матрицы А
и максимальная из полученных сумм
объявляется нормой.
– суммируются, по модулю, всестолбцы
матрицы А
и максимальная из полученных сумм
объявляется нормой.
3.
k–норма
![]() =
=![]() – суммируются квадраты всех элементов
матрицыА
и корень из этой суммы объявляется
нормой.
– суммируются квадраты всех элементов
матрицыА
и корень из этой суммы объявляется
нормой.
Векторы Основные определения и понятия
Частный случай
матрицы, состоящей из одного столбца,
имеет широкое самостоятельное применение.
Геометрическое изображение вектора
направленным отрезком, известное из
школьного курса, можно определить как
совокупность проекций вектор-отрезка,
записанных в виде матрицы-столбца. Тогда
имеем понятие свободного
вектора,
не зависящего от точки приложения,
которая может быть как в начале координат
(радиус-вектор),
так и в любой точке пространства.
Направление вектора всегда строго
сохраняется. Для двумерного случая:![]() =
=
![]() или
или
![]() =
=
![]() ;
;
![]() =
=
![]() или
или
![]() =
=
![]() .
Для общности, все проекции в дальнейшем
обозначаются через х
.
Для общности, все проекции в дальнейшем
обозначаются через х![]() и
называютсякоординатами
вектора. Если какая-то проекция
х
и
называютсякоординатами
вектора. Если какая-то проекция
х![]() отрицательна,
то она откладывается в противоположную
сторону соответствующей оси координат.
отрицательна,
то она откладывается в противоположную
сторону соответствующей оси координат.
Совершенно
так же выглядят векторы
![]() =
=
![]() в трехмерной системе координат -
добавляется координата z.
Но векторы размерности более трех
наглядно не представимы - они могут быть
поняты только по аналогии. Общее
определение: вектором
в n-мерном
пространстве называется упорядоченный
набор n
координат
в трехмерной системе координат -
добавляется координата z.
Но векторы размерности более трех
наглядно не представимы - они могут быть
поняты только по аналогии. Общее
определение: вектором
в n-мерном
пространстве называется упорядоченный
набор n
координат
![]() =
=
![]() ,
число которых равно размерности
пространства, т.е. n.
,
число которых равно размерности
пространства, т.е. n.
Длина
вектора
определяется формулой d=![]() .
Все операции с векторами - те же, что и
матрицами.
.
Все операции с векторами - те же, что и
матрицами.
Рассмотрим
линейную
комбинацию
трех векторов: k![]()
![]()
![]() +k
+k![]()
![]()
![]() +k
+k![]()
![]()
![]() .
.
Если
равенство k![]()
![]()
![]() +k
+k![]()
![]()
![]() +k
+k![]()
![]()
![]() =0
возможно только при k
=0
возможно только при k![]() =k
=k![]() =k
=k![]() =0,
то векторы
=0,
то векторы![]()
![]() ,
,![]()
![]() и
и![]()
![]() называютсялинейно
независимыми.
Иначе, по крайней мере, один из векторов
можно выразить суммой двух других и
векторы будут линейно
зависимыми
. Например, при k
называютсялинейно
независимыми.
Иначе, по крайней мере, один из векторов
можно выразить суммой двух других и
векторы будут линейно
зависимыми
. Например, при k![]()
![]() 0
можно записать:
0
можно записать:![]()
![]() =
=![]() (-
k
(-
k![]()
![]()
![]() -
k
-
k![]()
![]()
![]() ).
).
Максимально возможное число линейно независимых векторов равно размерности пространства. Так, для плоскости возможны только два таких вектора, для прямой - один. Для n-мерного пространства число векторов равно n.
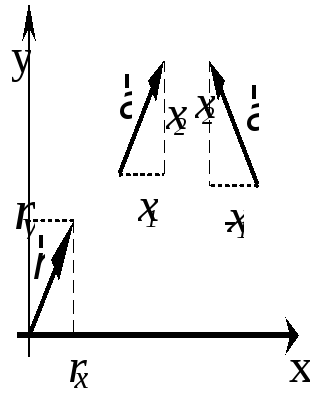
Пусть
на плоскости имеются векторы
![]() ,
,
![]() и
и
![]() .
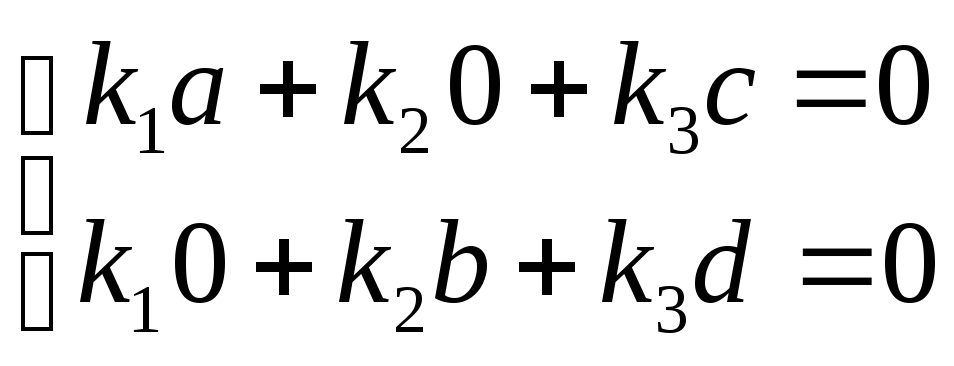
Покажем, что они линейно зависимы.
Составим их линейную комбинацию: k
.
Покажем, что они линейно зависимы.
Составим их линейную комбинацию: k![]()
![]() + k
+ k![]()
![]() +
k
+
k![]()
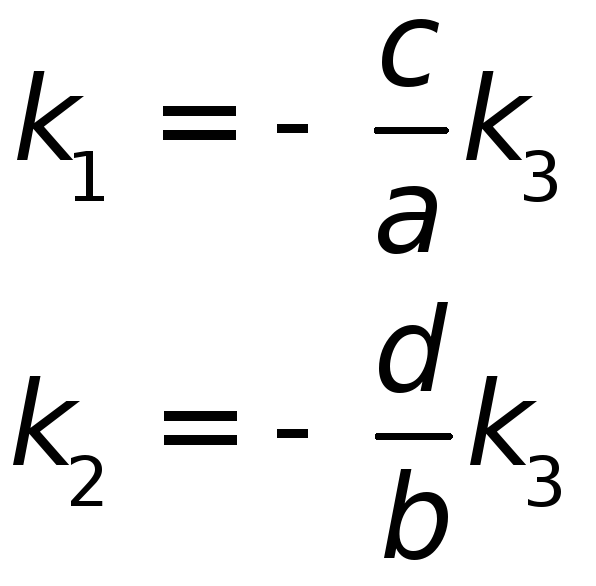
![]() = 0 и перейдем к алгебраической форме:
= 0 и перейдем к алгебраической форме:
![]()
 .
.
Таким
образом, положив k![]() =1,
имеем:
=1,
имеем:![]()
![]() -
-![]()
![]() +
+![]() =0
или
=0
или
![]() =
=![]()
![]() +
+![]()
![]() ,
т.е. третий вектор не является независимым
и выражается суммой двух других или
разлагается
по двум другим векторам. Рассмотрим
первые два вектора подробнее:
,
т.е. третий вектор не является независимым
и выражается суммой двух других или
разлагается
по двум другим векторам. Рассмотрим
первые два вектора подробнее:
![]() =а
=а![]() =а
=а![]() и
и![]() =b
=b![]() =b
=b![]() .
Тогда
.
Тогда![]() =с
=с![]() +d
+d![]() - очень компактная запись черезединичные
векторы
(или орты).
Покажем, что орты линейно независимы:
k
- очень компактная запись черезединичные
векторы
(или орты).
Покажем, что орты линейно независимы:
k![]()
![]() +
k
+
k![]()
![]() =
k
=
k![]()
![]() +k
+k![]()
![]() =0
или
=0
или
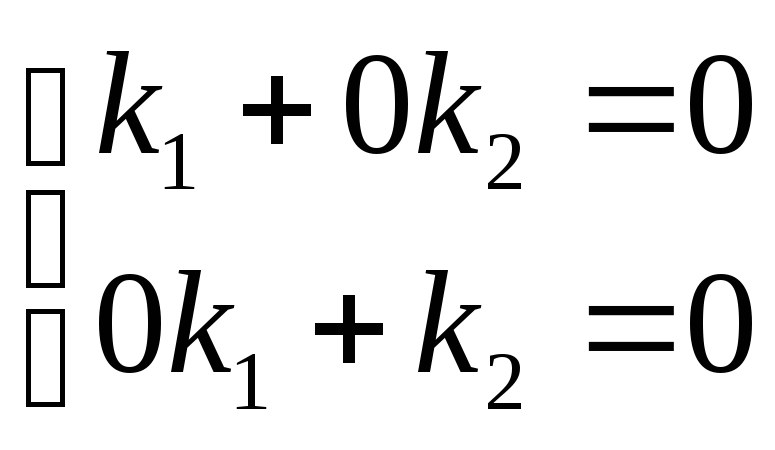 ,
откуда
k
,
откуда
k![]() =k
=k![]() =0.
=0.
Так
как с и
d
произвольны, то, очевидно, любой вектор
на плоскости можно представить комбинацией
двух ортов
![]() и
и![]() .
Это называется разложением вектора по
единичномубазису
или, точнее, по ортонормированному,
т.к. длина каждого орта равна 1. Конечно,
можно разлагать не по ортам, а по двум
любым линейно независимым векторам (по
общему базису),
к примеру,
.
Это называется разложением вектора по
единичномубазису
или, точнее, по ортонормированному,
т.к. длина каждого орта равна 1. Конечно,
можно разлагать не по ортам, а по двум
любым линейно независимым векторам (по
общему базису),
к примеру,
![]() и
и![]() ,
но разложение с помощью ортов является
и простым, и общим.
,
но разложение с помощью ортов является
и простым, и общим.
Все
введенные выше понятия справедливы для
пространства любой размерности. В
n-мерном
пространстве всегда имеются n
линейно независимых ортов
![]() =
=![]() ,
,![]() =
=![]() ,...,
,...,![]() =
=![]() ,
поэтому любой вектор
,
поэтому любой вектор![]() можно разложить по ортонормированному
базису:
можно разложить по ортонормированному
базису:![]() =а1
=а1![]() +а2
+а2![]() +...+аn
+...+аn![]() .
Разложение векторов по базису из линейно
независимых векторов всегда единственно
в любом принятом базисе.
.
Разложение векторов по базису из линейно
независимых векторов всегда единственно
в любом принятом базисе.