


6 Параметр, характеризующий нелинейную зависимость q( A ) = qx , не
вошёл в последнее уравнение. Граница абсолютной устойчивости определяем по параметрам линейной части системы (по выражению в скобках).
K1
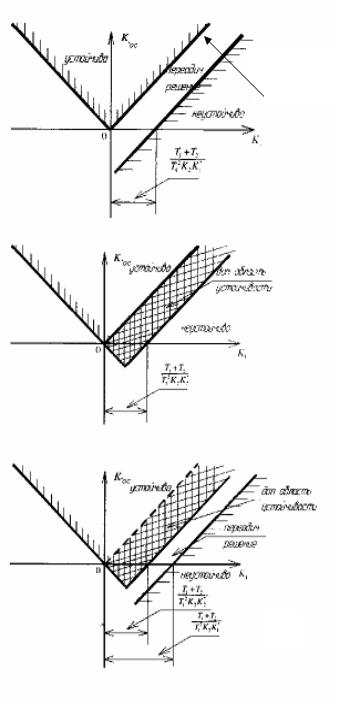
Рисунок 4.12 Область абсолютной устойчивости через параметры системы к примеру 4.11
(T K |
oc |
−T K |
1 |
) =0 |
; |
K |
|
= |
T2 K1 |
|
|
|
|||||||||
1 |
2 |
|
|
|
oc |
T1 |
||||
|
|
|
|
|
|
|
|
|
||
Дополнительно |
|
необходимо про- |
||||||||
верить |
|
положительность |
остальных |
|||||||
определителей Гурвица. Для системы третьего порядка положительность остальных определителей (∆1 и ∆2 ) сво-
дится к положительности коэффициентов характеристического уравнения.
T1 +T2 > 0 ; Koc > −K1
ОТВЕТ: Область абсолютной устойчивости через параметры линейной части системы (рисунок 4.12)
Koc > |
T2 K1 |
; Koc > −K1 |
|
||
|
T1 |
|
4.6 Определение границ дополнительной области устойчивости
Рассмотрим нелинейные системы, в которых факт устойчивости может быть установлен, если удовлетворяется критерий устойчивости линейной части
систем, а возможные значения r при нечетно-симметричной нелинейной ха-
0
рактеристике y = f(x) могут содержаться в интервале угла ограниченного прямыми r1 x и r2 x (смотри рисунок 4.13). Дополнительная область устойчивости определяется в зависимости от максимального и минимального значения коэффициента гармонической линеаризации для каждого вида нелинейной характеристики. Так интервал значений 0 ≤ q( A ) ≤ ∞ в действительности имеет
|
место только для идеального реле. Для других |
|
видов нелинейной характеристики значение q |
|
заключено в пределах |
|
qнм ≤q(A) ≤qнб, |
Рисунок 4.13 – Расположе- |
где qнм −наименьшее значение q ; |
ние нелинейного элемента в |
qнб −наибольшее значение q . |
интервале r1 x - r2 x |
|
113
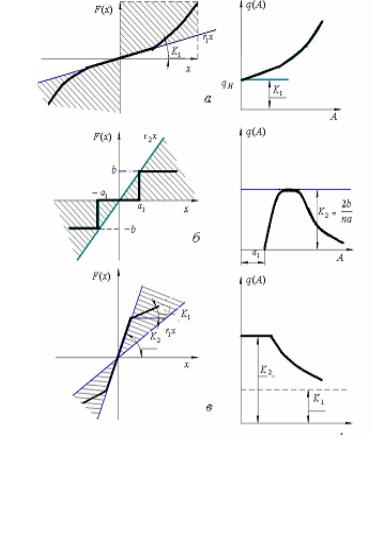
Рассмотрим наиболее характерные графики изменения коэффициентов гармонической линеаризации в зависимости от расположения нелинейной характеристики F(x) внутри сектора r1 x и r2 x (рисунок
4.14)
На рисунке 4.14 а показана нелинейная характеристика с возрастающим коэффициентом усиления, расположенная в секторе
|
|
r1 x ≤ F( x ) ≤ ∞ |
|
|
|
|
Соответствующий |
коэффици- |
|
|
|
ент гармонической |
линеаризации |
|
|
|
изменяется в пределах |
|
|
|
|
qнм = K1* ≤ q( A) ≤ ∞ |
||
|
|
На рисунке 4.14 б показана |
||
|
|
характеристика реле |
с зоной |
|
Рисунок 4.14 – Графики нелинейных харак- |
нечувствительности |
расположен- |
||
теристик внутри сектора r x |
и r x и соответ- |
ная в секторе |
|
|
1 |
2 |
|
|
|
ствующие им графики изменения коэффици- |
0 ≤ F( x )≤r2 x |
|||
ентов гармонической линеаризации |
|
|
|
|
Соответствующий коэффициент гармонической линеаризации изменяется в пределах
0 ≤ q(A) ≤ qнб = K2
На рисунке 4.14 в показана нелинейная характеристика усилителя с зоной насыщения, в которой коэффициент усиления уменьшается. Эта характеристика аппроксимирована кусочно-линейной зависимостью с коэффициентами усиления K 1 и K 2 , и расположена в секторе
r1 x ≤F( x )≤r2 x
Соответствующий коэффициент гармонической линеаризации изменяется в пределах
qнм = K1 ≤ q( A ) ≤ qнб = K2
Таким образом, каждый вид нелинейной характеристики имеет свой сектор расположения и свои предельные значения коэффициента линеаризации, что позволяет более точно определить условия устойчивости нелинейной системы. Е. П. Попов рекомендует этот расчет провести в следующем порядке [4].
114
Первый шаг. Границу области абсолютной устойчивости определять при 0 ≤ q( A) ≤ ∞ путем исключения гармонического коэффициента q( A) из урав-
нений
H n−1( q ) = 0; ∂Hn−1( q ) / ∂H =0
Это решение дает достаточные условия устойчивости при любой форме однозначной нелинейной характеристики и при любом интервале изменения коэффициента гармонической линеаризации.
Второй шаг. Получение дополнительной области устойчивости за счёт ограничения интервала фактически возможного изменения коэффициента гармонической линеаризации. Для этого в уравнение Hn−1(q) = 0 надо подставить
значения qнм (наименьшее) и qнб (наибольшее). Эти значения выражены через
параметры коэффициентов гармонической линеаризации (рисунок 4.14). Такое решение дает необходимые и достаточные условия устойчивости при заданной форме однозначной нелинейной характеристики.
Таким образом, по первому шагу определяется устойчивость нелинейной системы с некоторым запасом, когда не учитывается действительная граница нелинейности в секторе r1 x ≤ F( x ) ≤ r2 x .
По второму шагу проводится учет границ нелинейности. И чем более узкий сектор, где разместилась вся нелинейная характеристика, тем больше будет область дополнительной границы абсолютной устойчивости. Кроме этого, по условию Hn−1( q ) =0 при различных варьируемых параметрах линейной
части можно определить область периодических решений (режим автоколебаний). Рассмотрим этот метод на конкретном примере.
Пример 4.12 – Определить дополнительную область устойчивости в зависимости от K1 с учётом различного расположения нелинейной характеристики внутри сектора r1 x и r2 x по данным примера 4.11.
РЕШЕНИЕ
1 Определим значение Koc по уравнению границы области абсолютной устойчивости по критерию Гурвица H n−1(q) = 0 .
Hn−1( q ) =T1 +T2 +T1K2 (T1Koc −T2 K1 )q =0 T12 K2 Kocq = −(T1 +T2 ) +T1T2 K1K2q
K |
oc |
= T1T2 K1K2q |
− T1 +T2 |
= T2 K1 |
− T1 +T2 |
||||||||||
|
|
T 2 K |
2 |
q |
|
T 2 K |
2 |
q |
|
T |
|
T 2 K |
2 |
q |
|
|
|
1 |
|
1 |
|
1 |
1 |
|
|||||||
В общем случае значение Koc в зависимости от ограничения интервала изменения q( A) от qнб до qнм определяется соотношением
115
|
T2 K1 |
− |
T1 +T2 |
> Koc |
> |
T2 K1 |
− |
T1 +T2 |
|
|
|
|
|
|
|||||||||||||||||
|
|
T |
T 2 K |
2 |
q |
нм |
T |
T 2 K |
2 |
q |
нб |
|
|
|
|
|
|||||||||||||||
1 |
1 |
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Первый шаг по определению |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
устойчивости выполнен. |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
Koc > |
T2 K1 |
|
2 Для нелинейной характеристики |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
Koc >-K |
|
|
|
|
|
|
T1 |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
с |
|
возрастающим |
|
коэффициентом |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
усиления (рисунок 4.14 а) имеется |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ограничение |
|
|
|
по |
q наименьшему |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(qнм = K1* ) , |
|
|
|
|
а |
qнб = ∞. |
Тогда |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
значение Koc |
|
определяется |
|
|
|||||||||||||
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
T2 K1 |
|
|
|
T1 +T2 |
|
|
T2 K1 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
|
|
> Koc > |
; |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T1 |
|
T |
2 K |
2 |
K |
* |
T1 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|||||
Устойчивость системы при непериодических решениях остается в тех же пределах
|
|
Koc > |
T2 K1 |
; Koc > −K1 |
||||||
|
||||||||||
б |
|
T1 |
|
|||||||
|
|
|
|
|
||||||
|
|
|
Но |
при |
qнм = K1* возникают |
|||||
|
|
|
||||||||
|
периодические решения в пределах |
|||||||||
|
|
T2 K1 |
− |
T1 +T2 |
|
> Koc |
||||
|
|
|
||||||||
|
|
T1 T 2 K |
2 |
K* |
|
|||||
1 |
|
|
|
1 |
|
|||||
Это показано на рисунке 4.15 а 3 Для характеристики реле с
взоной нечувствительности (рисунок 4.14 б) имеется ограничение по q
|
наибольшему |
(qнб = K2* ) , а |
qнм =0 . |
||||||
|
Тогда значение Koc определяется |
||||||||
Рисунок 4.15 – Определение допол- |
|
|
|
|
|
|
|
|
|
нительной области устойчивости к |
Koc > |
T2 K1 |
− |
T1 +T2 |
|
||||
примеру 4.12 |
|
||||||||
T1 |
T 2 K |
2 |
K* |
|
|
||||
|
|
|
1 |
|
2 |
|
|
||
Ограничение нелинейной |
характеристики |
по |
qнб |
увеличивает |
область |
||||
непериодического решения. Области периодического решения нет. Это показано на рисунке 4.15 б.
116