

1.3. Фильтрация. Выделение объектов при помощи фильтров
ФИЛЬТРАЦИЯ БИНАРНЫХ ИЗОБРАЖЕНИЙ. МОДЕЛЬ ШУМА "СОЛЬ И ПЕРЕЦ". ЛОГИЧЕСКАЯ ФИЛЬТРАЦИЯ. РАНГОВАЯ ФИЛЬТРАЦИЯ. БИНАРНАЯ МЕДИАНА. СТРУКТУРНЫЕ ИСКАЖЕНИЯ. РАСШИРЕНИЕ И СЖАТИЕ БИНАРНЫХ ИЗОБРАЖЕНИЙ. ВЫДЕЛЕНИЕ МЕЛКОРАЗМЕРНЫХ ОБЪЕКТОВ. ПЕЛЕНГ. ПЕЛЕНГ С ОКАЙМЛЕНИЕМ. РЕКУРРЕНТНАЯ РЕАЛИЗАЦИЯ БИНАРНЫХ ФИЛЬТРОВ.
НЕЛИНЕЙНАЯ ФИЛЬТРАЦИЯ ПОЛУТОНОВЫХ ИЗОБРАЖЕНИЙ. ОБОБЩЕНИЕ МЕТОДОВ БИНАРНОЙ ФИЛЬТРАЦИИ. ПОРЯДКОВЫЕ СТАТИСТИКИ. РАНГОВАЯ ФИЛЬТРАЦИЯ. "БЫСТРЫЕ" АЛГОРИТМЫ РАНГОВОЙ ФИЛЬТРАЦИИ. СИГМА-ФИЛЬТР. ФИЛЬТРЫ, СОХРАНЯЮЩИЕ КРАЯ. НОРМАЛИЗАЦИЯ ФОНА.
Задача фильтрации изображений
Зашумление изображения. Модели шумов
Под задачей «фильтрации изображений» в широком смысле иногда понимают любые процедуры обработки изображений, при которых на вход процедуры подается (одно) растровое изображение, и на выходе также формируется растровое изображение. Такие процедуры типа (один растровый вход, один растровый выход) называют фильтрами.
Однако чаще под «фильтрацией» в более узком смысле понимают так называемую помеховую фильтрациюили фильтрацию изображений от «шума». При этом неявно предполагается, что первоначально где-то существовало некое «исходное» идеально чистое (незашумленное) изображение, из которого затем путемзашумления(определенного вида искажения), было получено то реальное изображение, которое мы наблюдаем. Задача помеховой фильтрации, таким образом, сводится к тому, чтобы путем некоторой обработки наблюдаемого реального изображения, как можно лучше «очистить его от шума», то есть получить изображение, наиболее близкое по своим характеристикам к исходному «незашумленному» изображению.
На самом деле необходимо понимать, что «зашумление» – это всего лишь очень упрощенная идеализированная модель возникновения искажений в цифровых изображениях реальных объектов. Вообще же говоря, искажения изображения, получаемого путем видеосъемки реального трехмерного объекта в природной обстановке, могут носить весьма сложный характер, зависящий от условий съемки (освещенность, туман, блики, тени, дождь, снег и т.п.), характеристик оптической системы (дисторсии, расфокусировки, замутненность линз и зеркал и т.п.), характеристик электронной регистрирующей аппаратуры, характеристик канала передачи, характеристик устройств оцифровки и еще многих и многих факторов. Приближенные к реальности математические модели формирования цифровых изображений содержат сотни сложных нелинейных уравнений и множество табличных поправок. При этом закон формирования значения яркости каждого пикселя изображения, как правило, не является независимым от формирования соседних пикселей, яркостные параметры изображения зависят от геометрических, и так далее. При попытке математически «скорректировать» подобную сложную модель регистрации изображения говорят уже не о фильтрации от шума, а о реставрацииилиреконструкцииизображений.
К сожалению, методы реставрации изображений слишком сложны в вычислительном смысле, чтобы на практике использоваться в системах машинного зрения, работающих в реальном масштабе времени. Кроме того, они требуют точного знания математической модели и всех параметров системы видео регистрации, что на практике также практически невозможно. Поэтому в реальных системах машинного зрения, как правило, используются более простые, но тем не менее достаточно эффективные процедуры помеховой фильтрации, разработанные для борьбы с гораздо более простыми искажениями в виде независимого зашумления пикселейизображения.
Наиболее общей моделью независимого зашумления пикселей является шум замещения. Пусть дано исходное («незашумленное») полутоновое изображениеIm, каждый пиксель которого может принимать значения в диапазоне [0..IMAX–1]. Общая модель шума замещения предполагает, что после зашумления каждый пиксель изображения, имевший ранее некотрое значение яркостиI, либо с некоторой известной вероятностьюp(I) это значение сохранит, либо данное значение яркости будет случайным образом замещено с вероятностьюq(I,J) некоторым другим значением яркостиJиз того же конечного дискретного диапазона [0..IMAX–1]. Как видно, для описания такой общей модели случайного замещения нам потребуется задать таблицупереходных вероятностейразмера (IMAX)2, что составляет весьма значительное количество в случае обычного 8-битового полутонового изображения (размер таблицы – 256256 элементов). Такое описание явно является некомпактным и поэтому редко используется на практике для полутоновых изображений. В то же время, для бинарных изображений, в которыхIMAX= 2, такое описание является наиболее удобным, простым и естественным. Чуть ниже мы еще рассмотрим модель шума замещения на бинарных изображениях – так называемую модель шума «соль и перец».
Для полутоновых изображений, как правило, рассматривают другую, более частную модель зашумления – аддитивный шум. Такая модель предполагает, что зашумленное изображение порождается по следующему закону:
Im’[x,y] = Im[x,y] + R(x,y),
где Im’[x,y] – пиксель зашумленного изображения,Im[x,y] – пиксель исходного изображения, аR(x,y) – случайнаяаддитивная шумовая компонента. Кроме того, в большинстве приложений зависимость шума от координат пикселя считается несущественной. И наконец, исходя из известного в статистикезакона больших чисел, закон распределения аддитивной шумовой компоненты предпочитают описывать удобным параметрическим семействомнормальныхилигауссовскихраспределений с нулевым средним. Таким образом,гауссовский аддитивный шумописывается следующим выражением:
Im’[x,y] = Im[x,y] + N(0,),
где N(a,) – нормальное распределение,a– математическое ожидание нормально распределенного сигнала,– средний квадрат отклонения (СКО) нормально распределенной величины. Именно такая модель зашумления чаще всего рассматривается в задачах фильтрации полутоновых изображений.
На рис. 3.2.2 – 3.2.8 показаны примеры искусственного зашумления исходного полутонового изображения лейкоцитов (рис. 3.2.1) специально сгенерированным аддитивным гауссовским шумом с различными значениями СКО. Как видно, чем больше параметр зашумления , тем более искаженным выглядит изображение. При больших значениях(рис. 3.2.7, 3.2.8) даже человеческий глаз уже с трудом различает общие очертания крупноразмерных объектов изображения (в данном случае – лейкоцитов), более мелкие и менее контрастные объекты становятся практически неразличимы.

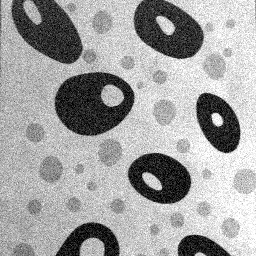
@Рис. 3.2.1. Исходное полутоновое @Рис. 3.2.2. Зашумление полутонового
изображение, = 0 изображения аддитивным гауссовским шумом,= 20


@Рис. 3.2.3. Зашумление полутонового @Рис. 3.2.4. Зашумление полутонового
изображения аддитивным гауссовским изображения аддитивным гауссовским
шумом, = 40 шумом,= 60


@Рис. 3.2.5. Зашумление полутонового @Рис. 3.2.6. Зашумление полутонового
изображения аддитивным гауссовским изображения аддитивным гауссовским
шумом, = 80 шумом,= 100


@Рис. 3.2.7. Зашумление полутонового @Рис. 3.2.8. Зашумление полутонового
изображения аддитивным гауссовским изображения аддитивным гауссовским
шумом, = 200 шумом,= 300
В следующих разделах мы будем иметь в виду этот пример, рассматривая различные методы фильтрации цифровых изображений.