

Алгоритм комплексирования
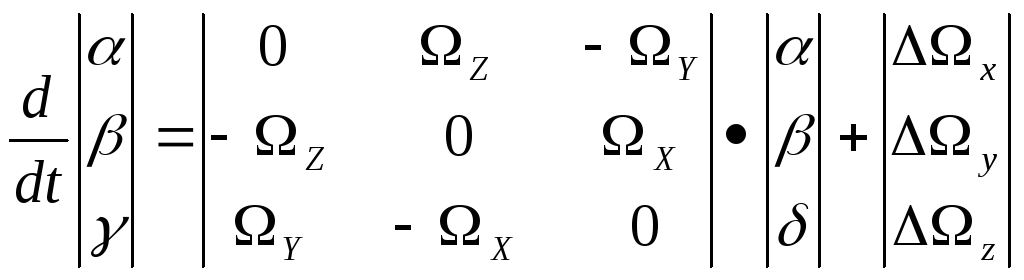
В основе алгоритма интеграции данных БИНС, РБВ, приемника и оценок КЭАН лежат уравнения ошибок БИНС, которые в проекциях на оси горизонтного сопровождающего трехгранника имеют вид [7.5]:

 , (7.53)
, (7.53)
 , (7.54)
, (7.54)
где
![]() - погрешности БИНС в определении координат
в горизонтной СК;
- погрешности БИНС в определении координат
в горизонтной СК;
![]() - погрешности БИНС в определении компонент
вектора скорости в горизонтной СК;
- погрешности БИНС в определении компонент
вектора скорости в горизонтной СК;
![]() - угловые погрешности ориентации
измерительного трёхгранника относительного
вычисленного, компоненты вектора угла
малого поворота;
- угловые погрешности ориентации
измерительного трёхгранника относительного
вычисленного, компоненты вектора угла
малого поворота;
![]() - погрешности акселерометров и гироскопов
в горизонтной СК;
- погрешности акселерометров и гироскопов
в горизонтной СК;
o – собственная частота колебаний ошибок БИНС, т.н. частота Шулера (равная o =1,25 10-3c-1 );
![]() -
производные проекций вектора абсолютной
угловой скорости вращения выбранного
трёхгранника.
-
производные проекций вектора абсолютной
угловой скорости вращения выбранного
трёхгранника.
В
состав расширенной динамической системы
введены соотношения для инструментальных
погрешностей измерений акселерометров
(![]() )T
и гироскопов (
)T
и гироскопов (![]() )T
в связанной СК, описываемых достаточно
упрощенной системой уравнений:
)T
в связанной СК, описываемых достаточно
упрощенной системой уравнений:
![]() ,
i=1,2,3 (7.55)
,
i=1,2,3 (7.55)
![]() ,
i=1,2,3
, (7.56)
,
i=1,2,3
, (7.56)
где ![]() - систематические ошибки акселерометров,
- систематические ошибки акселерометров,
![]() - случайные аддитивные ошибки
акселерометров,
- случайные аддитивные ошибки
акселерометров,
![]() - систематические ошибки ДУСов,
- систематические ошибки ДУСов,
![]() - случайные аддитивные ошибки ДУСов.
- случайные аддитивные ошибки ДУСов.
Приведение инструментальных ошибок гироскопов и акселерометров к горизонтной СК производится по следующим формулам:
 , (7.57)
, (7.57)
 , (7.58)
, (7.58)
где Cij – элементы матрицы направляющих косинусов между связанной и географической системой координат.
Кроме того, введем в состав расширенной динамической системы стохастическое дифференциальное уравнение, описывающее эволюцию динамической ошибки РБВ и формальное дифференциальное уравнение для систематической ошибки РБВ:
![]() (7.59)
(7.59)
Объединяя вышеприведенные уравнения, получим линейную стохастическую модель динамики ошибок БИНС:
![]() , (7.60)
, (7.60)
где ![]() - вектор состояния системы, включающий
ошибки БИНС в определении местоположения,
скорости, ориентации, а также компоненты
модели погрешностей инерциальных
датчиков;
- вектор состояния системы, включающий
ошибки БИНС в определении местоположения,
скорости, ориентации, а также компоненты
модели погрешностей инерциальных
датчиков;
F - переходная матрица состояния системы;
![]() - вектор шумов системы;
- вектор шумов системы;
G - матрица шумов системы.
Вектор состояния системы представляет собой блочный вектор размерностью 171 следующего вида:
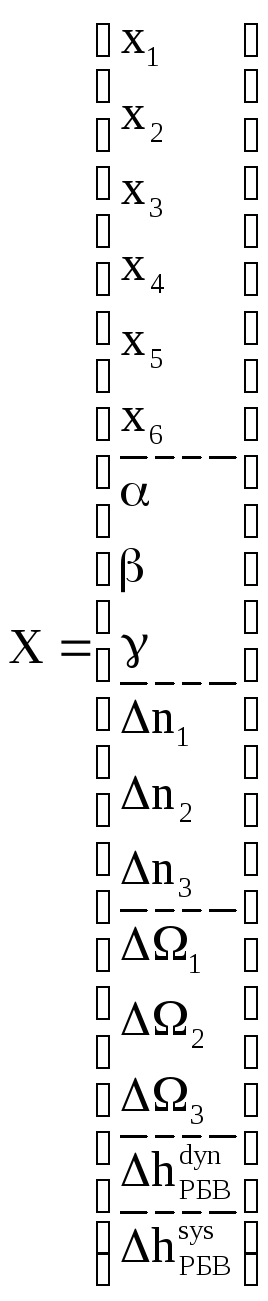 .
.
Вектор шумов системы представляет собой блочный вектор размерностью 71 следующего вида:
 .
.
Переходная матрица состояния системы (7.60) представляет собой блочную матрицу размерностью 1717 следующего вида:

где
 . (7.61)
. (7.61)
Матрица шумов системы представляет собой блочную матрицу размерностью 177 следующего вида:
 (7.62)
(7.62)
Измерения, поступающие в интегральный фильтр Калмана, можно сформировать по разности инерциальной и спутниковой информации (позиционной и скоростной). Высотные измерения можно сформировать также путем вычитания из показаний баровысотомера значения высоты, вычисленной в БИНС. При наличии показаний радиовысотомера возможно сравнение высоты, вычисленной в БИНС, с высотой от радиовысотомера. В этом случае потребуется информация от бортовой электронной карты местности (или из бортовой базы данных высот) для получения высоты над общим земным эллипсоидом.
Полученные измерения по координатам и скоростям будут состоять из ошибок БИНС и спутниковой системы, а измерение по высоте будет состоять из ошибки БИНС, ошибки высотомера (в случае радиовысотомера сюда войдет ошибка от необозначенных на карте объектов например деревья, постройки) и ошибки карты (в нее войдет ошибка от неточного определения координат в плане).
Таким образом, в штатном режиме работы, т.е. в режиме интегрирования выходных данных БИНС, РБВ и приемника ГЛОНАСС/GPS расширенный вектор измерений zk будет иметь вид:
 (7.63)
(7.63)
В том случае, если происходит деградация бортового комплекса за счет отсутствия данных СНС в вектор измерений включаются оценки положения от КЭАН и размерность вектора измерений составляет 31:
 (7.64)
(7.64)
Уравнение измерений записывается в следующем виде:
zk=H·xk+vk, (7.65)
где zk- расширенный вектор измерений,
H - матрица наблюдаемости, представляющая собой матрицу частных производных измеряемых параметров по компонентам вектора xk, вычисленной в некоторой опорной точке, например, в точки прогнозируемой оценки вектора xk.
vk- вектор шумов измерений.
Для штатного режима интеграции данных (т.е. для вектора zk, определяемого формулой 7.63) матрица H представляет собой матрицу размерности 617 следующего вида:
 (7.66)
(7.66)
где



![]()
Для режима работы, использующего вектор измерений zk, определяемого формулой 7.63а, матрица H представляет собой матрицу размерности 317 следующего вида:
 (7.67)
(7.67)
Измерения zk поступают на вход фильтра Калмана, который при плохой сходимости оценок работает в режиме -механизации [7.10] (например с коэффициентом =1,025), что обеспечивает лучшие характеристики сходимости оценок (см. главу ).
В результате работы фильтра вычисляется оценка текущих ошибок БИНС в определении координат, скоростей, углов ориентации, а также оценки погрешностей ее акселерометров и гироскопов. На основе полученных оценок корректируются показания БИНС и ее измерительных элементов.
Связь вектора состояния уравнений ошибок с поправками к вектору выходных параметров БИНС дается формулами [7.9]:


 (7.68)
(7.68)

![]()

 ,
,
где xi, i=115 – компоненты вектора состояния, причем компоненты с 1 по 3 – ошибки определения координат, с 4 по 6 – ошибки определения скорости, с 7 по 9 – ошибки ориентации вычисленной в БИНС системы координат, связанные с ошибками в определении углов курса, крена и тангажа, с 10 по 12 – систематические ошибки акселерометров в соответствии с выражением (7.57), с 13 по 15 – систематические ошибки гироскопов в соответствии с выражением (7.58).
Совокупность приведенных соотношений определяет алгоритм для вычисления корректирующих поправок к вектору выходных параметров БИНС. Совокупность соотношений (7.66) – (7.69) с учетом приводившихся схем комплексирования определяет позволяет построить алгоритм работы интегрированного бортового навигационного комплекса.
Отметим также, что в случае неполной деградации бортового интегрированного комплекса, т.е. при отсутствии данных СНС интегральный фильтр подключает данные КЭАН с использованием расширенного вектора измерений 7.64 и матрицы наблюдаемости 7.67. В случае отсутствия данных КЭАН, т.е. при полной деградации комплекса интегральный фильтр работает в режиме прогноза.
Описание ПМО, РЕАЛИЗУЮЩЕГО ИМИТАЦИОННУЮ МОДЕЛЬ МАЛОВЫСОТНОГО ПОЛЕТА ВЕРТОЛЕТА
Назначение и возможности модели
Представляемое программно-математическое обеспечение предназначено для моделирования маловысотного полета вертолета в географической системе координат с учетом особенностей функционирования бортового интегрированного комплекса в различных режимах работы.
Имитационная модель маловысотного полета вертолета позволяет варьировать следующие исходные данные и параметры используемых моделей и алгоритмов:
Интервал моделирования;
Параметры метода численного интегрирования, используемого при решении задачи динамики вертолета.
Аэродинамические характеристики вертолета и опорные характеристики автомата стабилизации;
Начальное положение в географической и гринвичской системе координат и скорость вертолета в связанной СК;
Начальную ориентацию и угловую скорость вертолета в связанной системе координат;
Частоту работы и коэффициенты усиления в каналах автомата стабилизации;
Частоту и режимы работы бортового интегрированного навигационного комплекса;
Частоту и параметры модели ошибок чувствительных элементов БИНС;
Частоту, ошибки начальной выставки БИНС и параметры интегрирования навигационного уравнения;
Частоту и параметры модели ошибок радиобаровысотомера;
Частоту и параметры модели ошибок приемника ГЛОНАСС/GPS;
Частоту и параметры модели РЛС и модели ошибок измерений РЛС;
Цифровой эталон местности;
Частоту работы КЭАН;
Частоту и априорную данные для интегрального фильтра;
Частоту, режим работы и параметры модели «идеального» пилота.
В результате моделирования ПМО позволяет получать информацию о следующих характеристиках в виде числовых значений по времени полета и графиков, иллюстрирующих:
Проекции траектории полета вертолета в географической СК на фоне подстилающей поверхности;
Эволюцию движения центра масс вертолета в географической и гринвичской СК;
Эволюцию углового движения вертолета в связанной СК;
Измерения, осуществляемые блоком чувствительных элементов БИНС;
Навигационные оценки положения, скорости и ориентации вертолета, формируемые БИНС в географической и гринвичской СК;
Оценку высоты полета в географической СК, формируемую радиобаровысотомером;
Навигационные оценки положения и скорости вертолета в географической СК, формируемые приемником ГЛОНАСС/GPS;
Трехмерное изображение кадра, формируемое бортовой РЛС;
Поправки к базовому решению БИНС по положению, скорости и ориентации, формируемые интегральным фильтром.
Эволюцию точности оценок интегрального фильтра.
Помимо перечисленных характеристик в файлах результатов сохраняются:
Эволюция движения центра масс вертолета в географической и гринвичской СК;
Эволюция углового движения вертолета в связанной СК;
Ошибки навигационных определений БИНС, радиобаровысотомера, приемника ГЛОНАСС/GPS.
Описание интерфейса пользователя
Представляемое ПМО состоит из следующего набора файлов и подкаталогов:
/IC – подкаталог, содержащий файлы аэродинамических характеристик вертолета и опорные характеристики автомата стабилизации, соответствующие балансировочным траекториям вертолета для различных скоростей полета. Все файлы данного подкаталога представляют собой стандартные Windows-ini файлы, каждая секция которого содержит информацию о параметрах для конкретного значения скорости полета.
/map – подкаталог, содержащий файл с цифровой картой местности (обычно dcl.map), формат которого подробно приведен в [1];
/RES – подкаталог, содержащий файлы результатов моделирования;
dss.exe – исполняемый файл;
ft.prj – файл проекта, содержащий значения всех исходных данных и параметров используемых при моделировании моделей и алгоритмов.
Для старта программного комплекса пользователь должен вызвать через Microsoft Explorer или иным способом запустить исполняемый файл проекта – dss.exe, находящийся в корневой директории проекта.
После запуска данного файла на рабочем столе пользователя отображается окно программы (рис. П.1).
Как видно из рисунка, главное окно программы состоит из:
строки меню, содержащей 4 пункта: Project (основные операции над файлом проекта), Simulation (операции продолжения, паузы и аварийного выхода из программы), Tools (быстрый вызов дополнительных программ), Help (информация о разработчиках);
панели кнопок, дублирующих все основные пункты меню;
списка закладок, предназначенных для отображения результатов моделирования (см. ниже);
строки управления процессом моделирования, состоящей из метки текущего времени моделирования (Time), прогресс-индикатора процента выполнения задачи т набора кнопок (Start, Pause, Exit);
строки состояния, состоящей из двух секций: Project File и Status, после которых указывается имя выбранного файла проекта и текущее состояние процесса моделирования.
Рис. П.1
Идеология программного комплекса основана на использовании так называемого файла проекта, представляющего собой стандартный Windows-ini файл и содержащий значения всех исходных данных моделирования, объединенные по соответствующим секциям. Данный файл служит своего рода посредником между средой моделирования и интерфейсом задания начальных данных, который может быть реализован совершенно различным образом. В данной версии данный интерфейс реализован самым простым способом – то есть непосредственным редактированием значений изменяемых параметров в окне редактирования свойств проекта (см. ниже) без контроля за областью допустимых значений и т.п. Пользователь может поменять значения данных параметров самостоятельно в любом другом текстовом редакторе, позволяющем сохранять текстовые ASCII-файлы (например, NotePad). Подробное описание секции файла проекта и идентификаторов параметров моделирования приведены ниже.
Отметим, что сразу после запуска исполняемого файла, пользователю доступно только меню Project, в котором доступны пункты Select Project и Exit (рис. П.2).
Рис. П.2
Пункт меню позволяет выбрать т.н. файл проекта, указав полный путь до данного файла (рис. П.3)
Рис. П.3
После выбора файла проекта пользователю становятся доступны остальные пункты меню Project: Save Project, View/Edit Properties и Attach Project.
Пункт Save Project позволяет сохранять файл проекта под другим именем в целях сохранения набора исходных данных и представляет собой стандартное диалоговое окно Windows сохранения файлов.
Пункт View/Edit Properties открывает диалоговое окно редактирования основных свойств проекта – то есть исходных данных, используемых при моделировании (рис. П.4).
Рис. П.4
Изменяя значения соответствующих идентификаторов параметров моделирования, пользователь настраивает имитационную модель под конкретные исходные данные и режимы моделирования. При нажатии на кнопку Ok пользователь сохраняет введенные изменения в выбранном файле проекта (о чем дополнительно запрашивается типовым диалоговым окном). При нажатии на кнопку Cancel все введенные пользователем изменения игнорируются.
Приведем полный перечень секции и идентификаторов файла проекта с указанием допустимого диапазона или значений.
|
Идентификатор параметра |
Описание |
Значение по умолчанию |
Примечание |
|
Секция Experiment (общие параметры моделирования) | |||
|
TBegin |
Момент времени начала моделирования, с |
По умолчанию 0 |
Фактически влияет лишь на отличие стартовой и географической СК |
|
TEnd |
Момент времени окончания моделирования, с |
|
|
|
ofControlSys |
Флаг включения автомата стабилизации |
(0,1), по умолчанию 1 – включено |
С выключенным автоматом стабилизации движение неустойчиво |
|
ofNaviSys |
Флаг включения навигационного комплекса |
(0,1), по умолчанию 1 – включено |
|
|
ofGuidanceSys |
Флаг включения модели «идеального» пилота |
(0,1), по умолчанию 1 – включено |
|
|
ofCustomControl |
Флаг включения ручного управления |
(0,1), по умолчанию 0 – выключено |
В настоящей версии не реализовано |
|
PosRMS |
|
|
|
|
VelRMS |
|
|
|
|
AngRMS |
|
|
|
|
Секция IC (начальные условия) | |||
|
IniX |
Начальное положение в проекции на ось X географической СК, м |
По умолчанию 0 |
|
|
IniY |
Начальное положение в проекции на ось Y географической СК, м |
По умолчанию 0 |
|
|
IniZ |
Начальное положение в проекции на ось Z географической СК, м |
По умолчанию 10 000 |
Значение по умолчанию выбрано для установки вертолета по центру карты |
|
VxBF |
Начальная скорость в проекции на ось X cвязанной СК, м/с |
По умолчанию 40 |
|
|
VyBF |
Начальная скорость в проекции на ось Y cвязанной СК, м/с |
По умолчанию 0 |
|
|
VzBF |
Начальная скорость в проекции на ось Z cвязанной СК, м/с |
По умолчанию 0 |
|
|
H |
Начальная высота полета в гринвичской СК, м |
По умолчанию 300 |
|
|
Fi |
Начальная широта полета в гринвичской СК, |
По умолчанию 56 |
|
|
Lam |
Начальная долгота полета в гринвичской СК, |
По умолчанию 38 |
|
|
Wx, Wy, Wz |
Начальные проекции вектора абсолютной угловой скорости на оси связанной СК, /с |
По умолчанию 0 |
|
|
Pitch, Yaw, Roll |
Начальные углы Эйлера (тангаж, рысканье, крен), |
По умолчанию 0 |
|
|
Секция Integration (параметры интегрирования) | |||
|
Tolerance |
Локальная относительная точность интегрирования |
По умолчанию 1e-16 |
|
|
H |
Минимальный шаг интегрирования, с |
|
Игнорируется, так как шаг выбирается автоматически, в зависимости от частот бортовых подсистем [1] |
|
NOutStep |
Число шагов, после которых осуществляется вывод результатов |
По умолчанию 20 |
|
|
OutPutMode |
Режим вывода результатов |
|
Игнорируется |
|
OutPutDestination |
Назначение вывода результатов |
|
Игнорируется, результаты всегда выводятся на экран |
|
Секция Weight (веса компонент вектора состояния при определении локальной погрешности интегрирования) | |||
|
Pos |
Вес компонент положения |
По умолчанию 1 |
|
|
Vel |
Вес компонент скорости |
По умолчанию 10 |
|
|
AngVel |
Вес компонент угловой скорости |
По умолчанию 100 |
|
|
Ang |
Вес углов ориентации |
По умолчанию 100 |
|
|
Quaternion |
Вес компонент кватерниона |
По умолчанию 100 |
|
|
Секция AuxiliariesFile (опорные файлы) | |||
|
AlongMove |
Имя файла, содержащего коэффициенты, характеризующие продольное движение вертолета |
По умолчанию D:\App\dss\IC\Alongmove.ini |
|
|
FlankMove |
Имя файла, содержащего коэффициенты, характеризующие боковое движение вертолета |
По умолчанию D:\App\dss\IC\Flankmove.ini |
|
|
AlToFlMove |
Имя файла, содержащего коэффициенты, характеризующие влияние продольного движения на боковое |
По умолчанию D:\App\dss\IC\AltoFl.ini |
|
|
FlToAlMove |
Имя файла, содержащего коэффициенты, характеризующие влияние продольного движения на боковое |
По умолчанию D:\App\dss\IC\FltoAl.ini |
|
|
Balance |
Имя файла, содержащего коэффициенты балансировочных характеристик вертолета |
По умолчанию D:\App\dss\IC\Balance.ini |
|
|
Секция ControlSystem (параметры автомат стабилизации) | |||
|
Freq |
Частота работы, Гц |
По умолчанию 100 |
|
|
iwx, iWy, iWz |
Коэффициенты усиления по угловой скорости |
По умолчанию 1 |
|
|
iPitch, iYaw, iRoll |
Коэффициенты усиления по углам ориентации |
По умолчанию 1 |
|
|
Секция NaviSystem (параметры бортового навигационного комплекса) | |||
|
Freq |
Частота работы, Гц |
По умолчанию 100 |
|
|
MeasFreq |
Частота работы блока чувствительных элементов БИНС, Гц |
По умолчанию 100 |
|
|
ofBINS |
Флаг включения БИНС |
(0,1), по умолчанию 1 – включено |
Игнорируется, БИНС включена всегда |
|
ofGNSS |
Флаг включения приемника ГЛОНАСС/GPS |
(0,1), по умолчанию 1 – включено |
|
|
ofAlti |
Флаг включения радиобаровысотомера |
(0,1), по умолчанию 1 – включено |
|
|
ofRLS |
Флаг включения бортовой РЛС |
(0,1), по умолчанию 0 – выключено |
|
|
ofKENS |
Флаг включения КЭАН |
(0,1), по умолчанию 0 – выключено |
Не действителен без флага ofRLS |
|
OfIF |
Флаг включения интегрального фильтра |
(0,1), по умолчанию 0 – выключено |
|
|
Секция Rate Gyro (параметры блока ДУСов) | |||
|
SysMeanX, SysMeanY, SysMeanZ |
Математическое ожидание температурного дрейфа ДУСов по соответствующим осям, /c |
По умолчанию 0 |
|
|
SysRMSX, SysRMSY, SysRMSZ |
CКО температурного дрейфа ДУСов по соответствующим осям, /с |
По умолчанию 0.00001 |
|
|
MNX, mNY, mNZ |
Математическое ожидание дрейфа ДУСов, пропорциональные перегрузкам по соответствующим осям, /c |
По умолчанию 0 |
|
|
MWX, mWY, mWZ |
Математическое ожидание масштабных коэффициентов ДУСов по соответствующим осям, /c |
По умолчанию 0 |
|
|
mWXQ, mWYQ, mWZQ |
Математическое ожидание дрейфа ДУСов из-за не ортогональности и перекоса осей чувствительности гироскопов по соответствующим осям, /c |
По умолчанию 0 |
|
|
sNX, sNY, sNZ |
CКО дрейфа ДУСов, пропорциональные перегрузкам по соответствующим осям, /c |
По умолчанию 0.00001 |
|
|
sWX, sWY, sWZ |
CКО масштабных коэффициентов ДУСов по соответствующим осям, /c |
По умолчанию 0.00001 |
|
|
sWXQ, sWYQ, sWZQ |
CКО дрейфа ДУСов из-за не ортогональности и перекоса осей чувствительности гироскопов по соответствующим осям, /c |
По умолчанию 0.00001 |
|
|
AddtCor |
Время корреляции случайной аддитивной составляющей ошибки измерений ДУС, с |
По умолчанию 1 |
|
|
AddRMS |
СКО случайной аддитивной составляющей ошибки измерений ДУС, /c |
По умолчанию 0.0001 |
|
|
IsAddErr |
Флаг учета случайной аддитивной составляющей ошибки |
(0,1), по умолчанию 1 – включено |
|
|
Секция Accel Block (параметры блока акселерометров) | |||
|
SysMeanX, SysMeanY, SysMeanZ |
Математическое ожидание смещения нуля акселерометров по соответствующим осям, g |
По умолчанию 0 |
|
|
SysRMSX, SysRMSY, SysRMSZ |
CКО смещения нуля акселерометров по соответствующим осям, g |
По умолчанию 0.00001 |
|
|
mNX, mNY, mNZ |
Математическое ожидание погрешности масштабных коэффициентов акселерометров по соответствующим осям, g |
По умолчанию 0 |
|
|
mNQ |
Математическое ожидание ошибка нелинейности акселерометров, g |
По умолчанию 0 |
|
|
sNX, sNY, sNZ |
CКО погрешности масштабных коэффициентов акселерометров по соответствующим осям, g |
По умолчанию 0.00001 |
|
|
sNQ |
CКО ошибка нелинейности акселерометров, g |
По умолчанию 0.00001 |
|
|
AddtCor |
Время корреляции случайной аддитивной составляющей ошибки измерений акселерометров, с |
По умолчанию 60 |
|
|
AddRMS |
СКО случайной аддитивной составляющей ошибки измерений акселерометров, g |
По умолчанию 0.00001 |
|
|
IsAddErr |
Флаг учета случайной аддитивной составляющей |
(0,1), по умолчанию 1 – включено |
|
|
IsSysErr |
Флаг учета смещения нуля акселерометров |
(0,1), по умолчанию 1 – включено |
|
|
Секция BINS (параметры БИНС) | |||
|
Freq |
Частота работы БИНС, Гц |
По умолчанию 100 |
|
|
IniSH |
СКО ошибки ввода исходных данных по высоте, м |
По умолчанию 10 |
|
|
IniSx |
СКО ошибки ввода исходных данных по направлению на север, м |
По умолчанию 3 |
|
|
IniSz |
СКО ошибки ввода исходных данных по направлению на восток, м |
По умолчанию 3 |
|
|
IniSVx, IniSVy, IniSVz |
СКО ошибки ввода исходных данных по скорости, м/с |
По умолчанию 0.01 |
|
|
IniSPitch, IniSYaw, IniSRoll |
СКО ошибки ориентации БИНС, |
умолчанию 0.001 |
|
|
Tolerance |
Локальная относительная точность интегрирования |
По умолчанию 1e-16 |
|
|
NOutStep |
Число шагов, после которых осуществляется вывод результатов |
По умолчанию 20 |
|
|
OutPutMode |
Режим вывода результатов |
|
Игнорируется |
|
OutPutDestination |
Назначение вывода результатов |
|
Игнорируется, результаты всегда выводятся на экран |
|
Секция Alti (параметры радиобаровысотомера) | |||
|
Freq |
Частота работы, Гц |
По умолчанию 100 |
|
|
SysMeanX |
Математическое ожидание систематической ошибки радиобаровысотомера, м |
По умолчанию 0 |
|
|
SysRMS |
CКО систематической ошибки радиобаровысотомера, м |
По умолчанию 0.3 |
|
|
AddtCor |
Время корреляции случайной аддитивной составляющей ошибки измерений радиобаровысотомера, с |
По умолчанию 3 |
|
|
AddRMS |
СКО случайной аддитивной составляющей ошибки измерений радиобаровысотомера, м |
По умолчанию 0.4 |
|
|
IsAddErr |
Флаг учета случайной аддитивной составляющей |
(0,1), по умолчанию 1 – включено |
|
|
IsSysErr |
Флаг учета систематической ошибки радиобаровысотомера |
(0,1), по умолчанию 1 – включено |
|
|
Секция GNSS (параметры приемника ГЛОНАСС/GPS) | |||
|
Freq |
Частота работы, Гц |
По умолчанию 10 |
|
|
SysIonMeanX, SysIonMeanY, SysIonMeanZ |
Математическое ожидание ошибки в определении положения, обусловленной ионосферной задержкой, м |
По умолчанию 0 |
|
|
SysTropoMeanX, SysTropoMeanY, SysTropoMeanZ |
Математическое ожидание ошибки в определении положения, обусловленной тропосферной задержкой, м |
По умолчанию 0 |
|
|
SysNKAMeanX, SysNKAMeanY, SysNKAMeanZ |
Математическое ожидание ошибки в определении положения, вносимая бортовой аппаратурой НКА, м |
По умолчанию 0 |
|
|
SysNAPMeanX, SysNAPMeanY, SysNAPMeanZ |
Математическое ожидание ошибки в определении положения, вносимая внутренними шумами приемника, м |
По умолчанию 0 |
|
|
SysMPMeanX, SysMPMeanY, SysMPMeanZ |
Математическое ожидание ошибки в определении положения, обусловленная многолучевостью, м |
По умолчанию 0 |
|
|
SysVelMeanX, SysVelMeanY, SysVelMeanZ |
Математическое ожидание систематической ошибки в определении скорости, м/с |
По умолчанию 0 |
|
|
SysIonRMSX, SysIonRMSY, SysIonRMSZ |
СКО ошибки в определении положения, обусловленной ионосферной задержкой, м |
По умолчанию 0.01 |
|
|
SysTropoRMSX, SysTropoRMSY, SysTropoRMSZ |
СКО ошибки в определении положения, обусловленной тропосферной задержкой, м |
По умолчанию 0.01 |
|
|
SysNKARMSX, SysNKARMSY, SysNKARMSZ |
СКО ошибки в определении положения, вносимая бортовой аппаратурой НКА, м |
По умолчанию 6 |
|
|
SysNAPRMSX, SysNAPRMSY, SysNAPRMSZ |
СКО ошибки в определении положения, вносимая внутренними шумами приемника, м |
По умолчанию 0.5 |
|
|
SysMPRMSX, SysMPRMSY, SysMPRMSZ |
СКО ошибки в определении положения, обусловленная многолучевостью, м |
По умолчанию 1.5 |
|
|
SysRMSVx, SysRMSVy, SysRMSVz |
СКО систематической ошибки в определении скорости, м/с |
По умолчанию 0.05 |
|
|
PosAddtCor |
Время корреляции случайной аддитивной составляющей ошибки определений положения, с |
По умолчанию 1 |
|
|
PosAddRMS |
СКО случайной аддитивной составляющей ошибки определений положения, м |
По умолчанию 5 |
|
|
VelAddtCor |
Время корреляции случайной аддитивной составляющей ошибки определений скорости, с |
По умолчанию 1 |
|
|
VelAddRMS |
СКО случайной аддитивной составляющей ошибки определений скорости, м/с |
По умолчанию 0.1 |
|
|
IsAddErr |
Флаг учета случайной аддитивной составляющей |
(0,1), по умолчанию 1 – включено |
|
|
IsSysIon |
Флаг учета ошибки, обусловленной влиянием ионосферы |
(0,1), по умолчанию 1 – включено |
|
|
IsSysTropo |
Флаг учета ошибки, обусловленной влиянием тропосферы |
(0,1), по умолчанию 1 – включено |
|
|
IsSysNKA |
Флаг учета ошибки, обусловленной влиянием аппаратуры НКА |
(0,1), по умолчанию 1 – включено |
|
|
IsSysNAP |
Флаг учета ошибки, обусловленной влиянием внутренних шумов приемника |
(0,1), по умолчанию 1 – включено |
|
|
IsSysMP |
Флаг учета ошибки, обусловленной влиянием многолучевости |
(0,1), по умолчанию 1 – включено |
|
|
IsSysVel |
Флаг учета систематической ошибки опреления скорости |
(0,1), по умолчанию 1 – включено |
|
|
Секция IntegralFilter (параметры интегрального фильтра) | |||
|
Freq |
Частота работы, Гц |
По умолчанию 1 |
|
|
RMSx, RMSy, RMSz |
Априорные СКО оценок фильтра по положению, м |
По умолчанию 10 |
|
|
RMSVx, RMSVy, RMSVz |
Априорные СКО оценок фильтра по скорости, м/c |
По умолчанию 0.1 |
|
|
RMSAlpha, RMSBeta, RMSGamma |
Априорные СКО оценок фильтра по ориентации, |
По умолчанию 0.01 |
|
|
RMSNx, RMSNy,RMSNz |
Априорные СКО оценок фильтра по систематической ошибке акселерометров, g |
По умолчанию 0.0001 |
|
|
RMSWx, RMSWy,RMSWz |
Априорные СКО оценок фильтра по систематической ошибке ДУСов, /с |
По умолчанию 0.0001 |
|
|
RMSNxAdd, RMSNyAdd, RMSNzAdd |
Априорные СКО по случайной ошибке акселерометров, g |
По умолчанию 0.0001 |
|
|
RMSWx, RMSWy,RMSWz |
Априорные СКО по случайной ошибке ДУСов, /с |
По умолчанию 0.0001 |
|
|
Секция RLS (параметры бортовой РЛС) | |||
|
Freq |
Частота работы, Гц |
По умолчанию 1 |
|
|
MissAngle |
Установочный угол, |
По умолчанию –4 |
|
|
MinAzimuth |
Минимальный угол азимута, |
По умолчанию –15 |
|
|
MaxAzimuth |
Максимальный угол азимута, |
По умолчанию +15 |
|
|
MinElevation |
Минимальный угол элевации, |
По умолчанию –10 |
|
|
MaxElevation |
Максимальный угол элевации, |
По умолчанию +20 |
|
|
MinRange |
Минимальная дальность, м |
По умолчанию 50 |
|
|
MaxRange |
Максимальная дальность, м |
По умолчанию 4500 |
|
|
DiscrRange |
Разрешающая способность по дальности, м |
По умолчанию 15 |
|
|
DiscrAzimuth |
Разрешающая способность по азимуту, |
По умолчанию 1.5 |
|
|
DiscrElevation |
Разрешающая способность по элевации, |
По умолчанию 0.5 |
Игнорируется |
|
RangeRMS |
СКО ошибки по дальности, м |
По умолчанию 4.3 |
|
|
AzimuthRMS |
СКО ошибки по азимуту, |
По умолчанию 3e-4 |
|
|
Секция Map (параметры цифрового эталона) | |||
|
MapFileName |
Имя файла с эталоном |
По умолчанию 'D:\app\dss\map\dcl.map' |
|
|
MaxZ |
Число сегментов по оси Z |
По умолчанию 1999 |
|
|
MaxX |
Число сегментов по оси Х |
По умолчанию 3999 |
|
|
Discrete |
Размер дискрета, м |
По умолчанию 10 |
|
|
Секция KENS (параметры КЭАН) | |||
|
Freq |
Частота работы, Гц |
По умолчанию 1 |
Не больше, чем частота работы РЛС |
|
Секция GuidanceSystem (параметры модели «идеального» пилота) | |||
|
Freq |
Частота работы, Гц |
По умолчанию 100 |
Не больше, чем частота работы БИНС |
|
DistanceFlyBy |
Дистанция требуемого облета препятствия, м |
По умолчанию 20 |
|
|
DistanceByPass |
Дистанция требуемого обхода препятствия, м |
По умолчанию 20 |
|
|
DistanceMin |
Минимальный радиус локации, м |
По умолчанию 100 |
|
|
DistanceMax |
Максимальный радиус локации, м |
По умолчанию 500 |
|
|
Width |
Ширина анализируемого кадра в сегментах карты |
По умолчанию 100 |
|
|
ofFlyBy |
Флаг облета препятствия |
(0,1), по умолчанию 1 – включено |
|
|
ofByPass |
Флаг обхода препятствия |
(0,1), по умолчанию 0 – выключено |
|
|
Секция ResultsFile (файлы результатов) | |||
|
ObjectFile |
Имя файла, содержащего эволюцию вертолета |
По умолчанию 'D:\app\dss\res\object.dat' |
|
|
EstFile |
Имя файла, содержащего ошибки навигационного комплекса |
По умолчанию 'D:\app\dss\res\error.dat' |
|
|
RLSRes |
Имя файла, содержащего текущий кадр РЛС |
По умолчанию 'D:\app\dss\res\rls.dat' |
|
После задания и сохранения внесенных изменений пользователь должен загрузить файл проекта в имитационную среду, вызвав пункт Attach Project меню Project. После инициализации проекта становится доступным меню (рис. П.5)
Рис. П.5

Выбрав пункт меню Start или нажав соответствующую кнопку в строке управления, пользователь запускает процесс имитационного моделирования.
Процесс моделирования можно прервать, выбрав пункт меню Pause или нажав соответствующую кнопку в строке управления. В последствии повторным выбором меню Start пользователь продолжит процесс моделирования.
Вся информация о ходе выполнения программы отображается на соответствующих закладках. Рассмотрим эти закладки:
«Numerical Values» - Числовые данные. Здесь представлены числовые данные о ходе процесса моделирования, сгруппированные по следующим блокам (рис. П.6):
Сenter of Mass Motion – координаты и скорости движения вертолета в географической СК, скорость в связанной (с индексом «с») и сферические координаты в гринвичской СК;
Аngular Motion – углы тангажа, рысканья и крена вертолета, а также проекции угловой скорости вертолета на оси связанной СК;
Measurement – измеренные значения угловой скорости (w) и кажущегося ускорения (N), а также высоты (Altitude), определяемой радиобаровысотомером;
BINS – оценки, сформированные БИНС по координатам и скоростям в географической СК, углам ориентации и сферическим координатам в гринвичской СК;
GNSS - оценки, сформированные приемником ГЛОНАСС/GPS по координатам и скоростям в географической СК;
RLS – служебная информация – индикатор цикла;
Integral Filter – поправки, формируемые интегральным фильтром к решению БИНС по координатам и скоростям в географической СК, углам ориентации и систематическим ошибкам ДУСов и акселерометров;
Apriory Accuracy – значения СКО оценок интегрального фильтра по координатам и скоростям в географической СК и углам ориентации;
Рис. П.6
«Visual Motion» - Визуализация. Здесь строится график движения вертолета в проекциях на плоскость XOY и плоскость XOZ географической системы координат, связанной с картой подстилающей поверхности (рис. П.7).
«Object CM» – Движение центра масс вертолета. Здесь строятся графики эволюции координат (Position (GF)) и скоростей движения (Velocity (GF)) вертолета в географической СК, скорость в связанной (Velocity (BF)) и сферические координаты (Spheric Coord) в гринвичской СК (рис. П.8);
«Object AM» – Угловое движение вертолета. Здесь строятся графики эволюции углов тангажа, рысканья и крена вертолета (Eualer Angles), а также проекции угловой скорости вертолета (Angular Velocity) на оси связанной СК (рис. П.9);
«Measurements» – Измерения. Здесь строятся графики эволюции измеренных значения угловой скорости (Angular Velocity) и кажущегося ускорения (Parent Acceleration), сформированных блоком чувствительных элементов БИНС (рис. П.10);
«BINS» – БИНС. Здесь строятся графики эволюции оценок, сформированные БИНС по положению (Position (GF)) и скорости движения (Velocity (GF)) вертолета в географической СК, углам ориентации (Eualer Angles) и сферическим координатам (Spheric Coord) в гринвичской СК (рис. П.11);
«Altimetr» – радиобаровысотомер. Здесь строится график эволюции оценки высоты в географической СК, сформированной радиобаровысотомером (рис. П.12);
«GNSS» – приемник ГЛОНАСС/GPS. Здесь строятся графики эволюции оценок, сформированные приемником ГЛОНАСС/GPS по положению (Position) и скорости движения (Velocity) вертолета в географической СК (рис. П.13);
«RLS» – бортовая РЛС. Здесь строится трехмерное изображение текущего кадра, сформированного РЛС в географической СК (рис. П.14);
«Integral Filter» – интегральный фильтр. Здесь строятся графики эволюции поправок, формируемых интегральным фильтром к решению БИНС по координатам (Position) и скоростям (Velocity) в географической СК, углам ориентации (Orientation) (рис. П.15);
«Apriory Accuracy» – интегральный фильтр. Здесь строятся графики эволюции СКО оценок интегрального фильтра по координатам (Position), скоростям (Velocity) в географической СК и углам ориентации (Orientation) (рис. П.16).
Рис. П.7
Рис. П.8
Рис. П.9
Рис. П.10
Рис. П.11
Рис. П.12
Рис. П.13
Рис. П.14
Рис. П.15
Рис. П.16
Помимо этого в процессе работы формируются файлы, содержащие параметры движения вертолета и ошибок навигационной системы (см. выше). Кроме того КЭАН формирует два типа файлов, это файл результатов работы КЭАН, и тройки файлов текущих данных КЭАН. Рассмотрим форматы этих файлов подробнее:
Файл результатов работы КЭАН:
Имя файла формируется следующим образом : XZ_KENS_<Начальное значение по Х>_<Начальное значение по Z>_<Минимальное значение угла азимута>_<Максимальное значение угла азимута>_<Минимальное значение угла элевации>_<Максимальное значение угла элевации>.txt
В данный файл построчно выводятся результаты работы КЭАН с шагом по времени 1сек.
Каждая строка данного файла имеет следующую структуру:
Истинная координата Х привязки кадра БРЛС, метры;
Координата Х, определенная при помощи КЭАН, метры;
Невязка этих координат, метры;
Истинная координата Z привязки кадра БРЛС, метры;
Координата Z, определенная при помощи КЭАН, метры;
Невязка этих координат, метры;
Размер кадра БРЛС по координате Х, дискреты;
Размер кадра БРЛС по координате Z, дискреты;
Тройки файлов текущих данных КЭАН:
Corr_<Координата Х привязки кадра, округленная до десятков метров>.dat, содержащий текущую корреляционную матрицу, полученную в результате работы КЭАН в данный момент времени, выведенная последовательно по столбцам, для построения получившейся поверхности в графическом пакете “Surfer 7.0”;
Kadr<Координата Х привязки кадра>,.dat содержащий текущий кадр БРЛС, выведенный последовательно по столбцам, для построения получившейся поверхности в графическом пакете “Surfer 7.0”;
Map< Координата Х привязки кадра >,.dat содержащий текущую область поиска на карте, выведенная последовательно по столбцам, для построения получившейся поверхности в графическом пакете “Surfer 7.0”;
Варианты лабораторных работ
Отчет
Отчет по лабораторной работе должен содержать:
Проекции траектории движения вертолета на плоскость OXgrYgrгеографической системы координат и проекцию подстилающей поверхности для каждого варианта моделирования;
Графики эволюции ошибок БИНС по положению и скорости.
Выводы по результатам имитационного моделирования.
Вариант №1
Параметры моделирования:
Время имитационного моделирования полета – 300с
Положение вертолета определяется следующими начальными условиями: ( = 57°, = 38°, hпол =300 м, Xgr = 0, Ygr = 0, Zgr = 10 000м).
Облет препятствий осуществляется на высоте 60м. Радиус локации - 600м.
Обход препятствий осуществляется на дистанции 60м. Радиус локации 1000м.
Варианты моделирования:
БИНС, GPS, РБВ (Без комплексирования);
БИНС, GPS, РБВ (Комплексирование);
БИНС (ошибки БИНС увеличить в 5 раз), GPS, РБВ (Комплексирование);
БИНС (ошибки БИНС увеличить в 5 раз), GPS (Без комплексирования);
БИНС (ошибки БИНС увеличить в 5 раз), РБВ (Без комплексирования);
БИНС (ошибки БИНС увеличить в 5 раз) (Без комплексирования);
Меняется аддитивная составляющая ошибки навигационного устройства
Вариант №2
Параметры моделирования:
Время имитационного моделирования полета – 300с
Положение вертолета определяется следующими начальными условиями: ( = 57°, = 38°, hпол =300 м, Xgr = 0, Ygr = 0, Zgr = 10 000м).
Облет препятствий осуществляется на высоте 50м. Радиус локации - 400м.
Обход препятствий осуществляется на дистанции 80м. Радиус локации 800м.
Варианты моделирования:
БИНС, GPS, РБВ (Без комплексирования);
БИНС, GPS, РБВ (Комплексирование);
БИНС (ошибки GPS увеличить в 5 раз), GPS, РБВ (Комплексирование);
БИНС (ошибки БИНС увеличить в 5 раз), GPS (Без комплексирования);
БИНС (ошибки РБВ увеличить в 5 раз), РБВ (Без комплексирования);
БИНС (ошибки БИНС увеличить в 5 раз) (Без комплексирования);
Меняется аддитивная составляющая ошибки навигационного устройства
Вариант №3
Параметры моделирования:
Время имитационного моделирования полета – 300с
Положение вертолета определяется следующими начальными условиями: ( = 57°, = 38°, hпол =300 м, Xgr = 0, Ygr = 0, Zgr = 10 000м).
Облет препятствий осуществляется на высоте 40м. Радиус локации - 400м.
Обход препятствий осуществляется на дистанции 40м. Радиус локации 800м.
Варианты моделирования:
БИНС, GPS, РБВ (Без комплексирования);
БИНС, GPS, РБВ (Комплексирование);
БИНС (ошибки GPS и РБВ увеличить в 5 раз), GPS, РБВ (Комплексирование);
БИНС (ошибки БИНС, GPS увеличить в 5 раз), GPS (Без комплексирования);
БИНС (ошибки РБВ увеличить в 5 раз), РБВ (Без комплексирования);
БИНС (ошибки БИНС увеличить в 5 раз) (Без комплексирования);
Вариант №4
Параметры моделирования:
Время имитационного моделирования полета – 300с
Положение вертолета определяется следующими начальными условиями: ( = 57°, = 38°, hпол =300 м, Xgr = 0, Ygr = 0, Zgr = 8 000м).
Облет препятствий осуществляется на высоте 50м. Радиус локации - 700м.
Обход препятствий осуществляется на дистанции 40м. Радиус локации 1000м.
Варианты моделирования:
БИНС, GPS, РБВ (Без комплексирования);
БИНС, GPS, РБВ (Комплексирование);
БИНС (ошибки БИНС увеличить в 6 раз), GPS, РБВ (Комплексирование);
БИНС (ошибки БИНС увеличить в 6 раз), GPS (Без комплексирования);
БИНС (ошибки БИНС увеличить в 6 раз), РБВ (Без комплексирования);
БИНС (ошибки БИНС увеличить в 6 раз) (Без комплексирования);
Меняется аддитивная составляющая ошибки навигационного устройства
Вариант №5
Параметры моделирования:
Время имитационного моделирования полета – 300с
Положение вертолета определяется следующими начальными условиями: ( = 57°, = 38°, hпол =300 м, Xgr = 0, Ygr = 0, Zgr = 8 000м).
Облет препятствий осуществляется на высоте 60м. Радиус локации - 400м.
Обход препятствий осуществляется на дистанции 50м. Радиус локации 900м.
Варианты моделирования:
БИНС, GPS, РБВ (Без комплексирования);
БИНС, GPS, РБВ (Комплексирование);
БИНС (ошибки GPS увеличить в 6 раз), GPS, РБВ (Комплексирование);
БИНС (ошибки БИНС увеличить в 6 раз), GPS (Без комплексирования);
БИНС (ошибки РБВ увеличить в 6 раз), РБВ (Без комплексирования);
БИНС (ошибки БИНС увеличить в 6 раз) (Без комплексирования);
Меняется аддитивная составляющая ошибки навигационного устройства
Вариант №6
Параметры моделирования:
Время имитационного моделирования полета – 300с
Положение вертолета определяется следующими начальными условиями: ( = 57°, = 38°, hпол =300 м, Xgr = 0, Ygr = 0, Zgr = 8 000м).
Облет препятствий осуществляется на высоте 60м. Радиус локации - 800м.
Обход препятствий осуществляется на дистанции 50м. Радиус локации 400м.
Варианты моделирования:
БИНС, GPS, РБВ (Без комплексирования);
БИНС, GPS, РБВ (Комплексирование);
БИНС (ошибки GPS и РБВ увеличить в 6 раз), GPS, РБВ (Комплексирование);
БИНС (ошибки БИНС, GPS увеличить в 6 раз), GPS (Без комплексирования);
БИНС (ошибки РБВ увеличить в 6 раз), РБВ (Без комплексирования);
БИНС (ошибки БИНС увеличить в 6 раз) (Без комплексирования);
Меняется аддитивная составляющая ошибки навигационного устройства
Вариант №7
Параметры моделирования:
Время имитационного моделирования полета – 300с
Положение вертолета определяется следующими начальными условиями: ( = 57°, = 38°, hпол =300 м, Xgr = 0, Ygr = 0, Zgr = 15 000м).
Облет препятствий осуществляется на высоте 40м. Радиус локации - 400м.
Обход препятствий осуществляется на дистанции 60м. Радиус локации 500м.
Варианты моделирования:
БИНС, GPS, РБВ (Без комплексирования);
БИНС, GPS, РБВ (Комплексирование);
БИНС (ошибки БИНС увеличить в 7 раз), GPS, РБВ (Комплексирование);
БИНС (ошибки БИНС увеличить в 7 раз), GPS (Без комплексирования);
БИНС (ошибки БИНС увеличить в 7 раз), РБВ (Без комплексирования);
БИНС (ошибки БИНС увеличить в 7 раз) (Без комплексирования);
Меняется аддитивная составляющая ошибки навигационного устройства
Вариант №8
Параметры моделирования:
Время имитационного моделирования полета – 300с
Положение вертолета определяется следующими начальными условиями: ( = 57°, = 38°, hпол =300 м, Xgr = 0, Ygr = 0, Zgr = 15 000м).
Облет препятствий осуществляется на высоте 80м. Радиус локации - 400м.
Обход препятствий осуществляется на дистанции 70м. Радиус локации 500м.
Варианты моделирования:
БИНС, GPS, РБВ (Без комплексирования);
БИНС, GPS, РБВ (Комплексирование);
БИНС (ошибки GPS увеличить в 7 раз), GPS, РБВ (Комплексирование);
БИНС (ошибки БИНС увеличить в 7 раз), GPS (Без комплексирования);
БИНС (ошибки РБВ увеличить в 7 раз), РБВ (Без комплексирования);
БИНС (ошибки БИНС увеличить в 7 раз) (Без комплексирования);
Меняется аддитивная составляющая ошибки навигационного устройства