

Системы координат
В практике исследования динамики полета ЛА в атмосфере традиционно используются три типа систем координат [7.1, 7.2]: инерциальные, связанные с землей, связанные с ЛА, а также их модификации. Все системы декартовы, правые (знаки угловых скоростей и ускорений, углов, моментов положительны при вращении против часовой стрелки, если смотреть с положительного направления оси вращения). При этом наиболее употребительны следующие системы координат (рис.7.2.7.3.):
Географическая (гринвичская) система координат OEXGRYGRZGR;
Абсолютная географическая (квазиинерциальная) система координат OEXAYAZA;
Горизонтный сопровождающий трехгранник, ориентированный по сторонам света (горизонтная система координат) OXNEYNEZNE;
Связанная система координат OXBFYBFZBF.
Топографическая система координат OXMYMZM
Начало географической [7.3] СК OEXGRYGRZGR расположено в центре масс Земли (вернее, фигуры, аппроксимирующей геоид), ось OEZGR направлена по вектору угловой скорости вращения Земли (UEarth), ось OEXGR лежит в экваториальной плоскости и направлена на гринвичский меридиан и ось OEYGR дополняет систему до правой.
Абсолютная географическая система координат представляет собой замороженную в пространстве на момент начала движения географическую СК (квазиинерциальная СК).
Начало горизонтной СК расположено в центре масс вертолета. Ось OYNE направлена по местной вертикали, ось OXNE и OZNE расположены в плоскости местного горизонта; ось OXNE направлена на север по местному меридиану и ось OZNE направлена на восток по местной параллели.
Начало связанной СК OXBFYBFZBF расположено в центре масс вертолета, ось ОYBF направляется параллельно оси вала несущего винта (НВ) вверх, ось ОХBF - вперед, в продольной плоскости вертолета, ось OZBF - к правому борту.
Географическая СК используется для решения основного уравнения инерциальной навигации и получения оценок движения центра масс вертолета при использовании в спутниковой навигации. Параметры ориентации определены по отношению к горизонтной СК.
Переход от абсолютной географической СК (квазиинерциальной) к географической описывается с использованием матрицы перехода, имеющей вид:
![]() , (7.1)
, (7.1)
где t – текущее время моделирования, t0=0.
Переход от географической СК к горизонтной будет описан с использованием матрицы перехода, формируемой следующим образом:
![]() , (7.2)
, (7.2)
где , , h географическая широта, долгота и превышение над земным эллипсоидом объекта [7.4].
Рис. 7.2
Декартовы координаты точки O будут выражены в географической СК с использованием соотношений [7.3]:
 , (7.3)
, (7.3)
где
![]() ,
ез
- эксцентриситет земного эллипсоида;
а
- большая полуось эллипсоида;
0,
0,
h0
- высота точки O над поверхностью земного
эллипсоида в момент начала движения.
,
ез
- эксцентриситет земного эллипсоида;
а
- большая полуось эллипсоида;
0,
0,
h0
- высота точки O над поверхностью земного
эллипсоида в момент начала движения.
Переход от горизонтной СК к связанной описывается последовательностью трех поворотов на углы Эйлера [2]:
![]() , (7.4)
, (7.4)
где матрицы элементарных поворотов имеют вид:
 ,
, 
 .
.
где угол рыскания ψ - угол между проекцией оси ОХBF на плоскость местного горизонта ОХNEZNE и осью ОХNE горизонтной СК. Угол тангажа θ -угол между осью ОХBF и плоскостью местного горизонта ОХNEZNE , угол крена γ - угол между осью ОYBF и местной вертикальной плоскостью, проходящей через ось ОХBF.
Рассмотрим подробнее топографическую систему координат и ее связь с географической СК. В силу того, что поверхность земного эллипсоида невозможно развернуть на плоскость без разрывов и искажений, при проецировании происходят нарушения одного или нескольких свойств проекции: равномасштабность, равноугольность, равновеликость [7.12]. Существуют различные виды картографических проекций, каждому из них соответствуют определенная картографическая сетка и присущие ей искажения. Картографические проекции классифицируют по характеру искажений, виду изображения меридианов и параллелей (географической сетке) и некоторым другим признакам.
По характеру искажений различают следующие картографические проекции:
Равноугольные – сохраняющие равенство углов, между направлениями на карте и в натуре. На рис.7.3 показана карта мира, на которой картографическая сетка сохраняет свойство равноугольности. На карте сохранено подобие углов, но искажены размеры площадей.
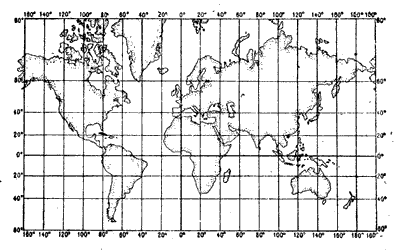
Рис. 7.3. Равноугольная проекция.
Равновеликие – сохраняющие пропорциональность площадей на карте соответствующим площадям на земном эллипсоиде. На рис.7.4 показана карта мира, составленная в равновеликой проекции. На ней сохранена пропорциональность всех площадей, но искажено подобие фигур, то есть отсутствует равноугольность. Взаимная перпендикулярность меридианов и параллелей на такой карте сохраняется только по среднему меридиану.

Рис. 7.4. Равновеликая проекция.
Равнопромежуточные – сохраняющие постоянство масштаба по какому-либо направлению;
Произвольные – не сохраняющие ни равенства углов, ни пропорциональности площадей, ни постоянства масштаба. Смысл применения произвольных проекций заключается в более равномерном распределении искажений на карте и удобстве решения некоторых практических задач
По виду изображения сетки меридианов и параллелей картографической проекции подразделяются на конические, цилиндрические, азимутальные и др. Причем в пределах каждой из этих групп могут быть разные по характеру искажений проекции (равноугольные, равновеликие и т. д.). Геометрическая сущность конических и цилиндрических проекций заключается в том, что сетка меридианов и параллелей проектируется на боковую поверхность конуса или цилиндра с последующим развертыванием этих поверхностей в плоскость. Геометрическая сущность азимутальных проекций заключается в том, что сетка меридианов и параллелей проектируется на плоскость, касательную к шару в одном из полюсов или секущую по какой-либо параллели.
Выбор картографической проекции для топографических карт зависит от размеров картографируемой территории и ее географического положения. Большинство стран мира для составления топографических карт используют равноугольные цилиндрические проекции (Таблица 7.1).
Таблица 7.1.
|
Название |
Используется |
Начальная широта |
Масштаб центрального мередиана |
Ширина зоны |
Сдвиг оси X |
Сдвиг оси Z |
|
Юго-ориентированное равноугольная цилиндрическая проекция |
Южная Африка |
00 |
1.0 |
20 |
0м |
0м |
|
Универсальная северная равноугольная цилиндрическая проекция |
Повсеместно от экватора до 840северной широты |
0 |
0.9996 |
60 |
-500000м |
0м |
|
Универсальная южная равноугольная цилиндрическая проекция |
Повсеместно от экватора до 840южной широты |
0 |
0.9996 |
60 |
500000м |
106м |
|
Проекция Гаусса-Крюгера |
Россия, Югославия, Германия, Южная Америка |
0 |
1 |
60 |
-500000м |
Различный |
|
Проекция Гаусса-Боага |
Италия |
Различный |
0.9996 |
60 |
Различный |
0м |
В России для топографических карт масштабов 1:10 000 - 1:1 000 000 принята единая равноугольная поперечно-цилиндрическая проекция Гаусса-Крюгера.
Геометрическую сущность такой проекции можно представить следующим образом. Весь земной эллипсоид делят на зоны, и для каждой зоны в отдельности составляют карты. При этом устанавливают такие размеры зон, чтобы можно было каждую из них развернуть в плоскость, то есть изобразить на карте практически без заметных искажений. Для получения картографической сетки и составления по ней карты в проекции Гаусса поверхность земного эллипсоида разбивают по меридианам на 60 зон по 6° каждая (рис.7.5). Максимальный масштаб карт принятый в топографии – 1:1 000 000. Карта данного масштаба является основой для системы деления карты на отдельные листы – разграфки и для нумерации листов – номенклатуры. Ряды миллионной карты обозначаются заглавными буквами латинского алфавита (от А до V) и счёт их ведётся от экватора к полюсам. Колонны же листов нумеруются цифрами от 1 до 60. Счёт колонн ведётся от меридиана 180 градусов с запада на восток (рис. 7.5).

Рис. 7.5. Деление земного эллипсоида на 6-ти градусные зоны.
Правила и порядок образования топографических карт всех масштабов приведены в таблице 7.2.
Таблица 7.2.
|
Виды карт |
Масштаб карты |
Типы карт |
Порядок образования листа карты |
Схема образования листа карты |
Размер листа карты |
Пример номенклатуры |
|
Оперативные |
1:1000000 |
Мелкомасштабные |
деление земного эллипсоида параллелями, меридианами |
6° 4° |
4° × 6° |
С-3 |
|
1:500000 |
деление листа миллионной карты на 4 части |
А Б В Г |
2° × 3° |
С-3-Б | ||
|
1:200000 |
Среднемасштабные |
деление листа миллионной карты на 36 частей |
XVI |
40' × 1° |
С-3-XVI | |
|
Тактические |
1:100000 |
деление листа миллионной карты на 144 части |
56 |
20' × 30' |
С-3-56 | |
|
1:50 000 |
Крупномасштабные |
деление листа карты М. 1:100 000 на 4 части |
А Б В Г |
10' × 15' |
С-3-56-А | |
|
1:25 000 |
деление листа карты М. 1:50 000 на 4 части |
а б в г |
5' × 7' 30" |
С-3-56-А-б | ||
|
1:10 000 |
деление листа карты М. 1:25 000 на 4 части |
1 2 3 4 |
2' 30" × 3' 45" |
С-3-56-А-б-4 |
На топографические карты наносится координатная сетка и указывается привязка сетки к топографическим координатам.
Начало топографической СК OXMYMZM размещается на поверхности Земли на экваторе, долгота точки начала координат определяется серединным меридианом зоны карты минус 500 000 м (Рис. 7.6).

Рис. 7.6. Топографическая система координат
Ось OYM системы направляется вверх по местной вертикали, оси OXM, OZM лежат в местной горизонтальной плоскости и совпадают с осями горизонтной СК.
Топографические СК определяются для каждой зоны; для связи между зонами к значению координаты ZM слева приписывают порядковый номер зоны. Топографическая СК OXMYMZM используется для привязки вертолета к цифровой карте местности и работы КЭАН.
Переход от географической СК к топографической СК осуществляется с использованием соотношений [7.12]:
 (7.5)
(7.5)

![]() ,
,
где:
ZM0– начальный сдвиг по осиZM;
![]() - долготы текущей
точки и точки начала топографической
СК;
- долготы текущей
точки и точки начала топографической
СК;
![]() - широты текущей
точки и точки начала топографической
СК;
- широты текущей
точки и точки начала топографической
СК;
Y0– высота точки в географической СК;
e- эксцентриситет земного эллипсоида;
a– большая полуось земного эллипсоида;
![]() - средний радиус
земного эллипсоида;
- средний радиус
земного эллипсоида;
![]() - масштабный
коэффициент проекции;
- масштабный
коэффициент проекции;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
 ;
;
![]() .
.
Обратные преобразования производятся следующим образом [7.12]:
 (7.6)
(7.6)
 ,
,
где:
![]() ;
;
 ;
;
 ;
;
 ;
;
 ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Таким образом, при формировании функционально-программного прототипа интегрированного бортового ПНК в режиме МВП используются следующие системы координат (см. таблицу 7.3.):
Таблица 7.3
|
Система координат |
Область применения |
|
Географическая (гринвичская) система координат |
Расширенный фазовый вектор состояния, Оценки положения и скорости вертолета, формируемые ГЛОНАСС/GPS приемником |
|
Горизонтный сопровождающий трехгранник, (горизонтная система координат) |
Уравнения динамики вертолета, компоненты вектора скорости, Углы Эйлера. |
|
Связанная система координат |
Вектор абсолютной угловой скорости, Вектор кажущегося ускорения, |
|
Топографическая система координат |
Оценка вектора положения, формируемая КЭАН |