

Н Рис. 7.1а рис. 7.1 представлена обобщенная структурная схема пк «aam Fly Simulator version 1.0», описывающая процесс работы и основные элементы программы.
В файле начальных условий (файл проекта), представляющий собой текстовый ASCII файл в формате Windows-“ini” файла (т.е. файла, каждая строка которого формируется по принципу: «параметр=значение»), содержит все необходимые значения коэффициентов моделей движения ЛА и цели, алгоритмов работы контуров стабилизации и наведения, переключателей режимов полета ЛА, маневров цели, имена файлов с аэродинамическими коэффициентами и т.п.
Блок задания начальных условий позволяет выбрать и, по необходимости, отредактировать файл проекта и передать считанные значения блоку инициализации.
Блок инициализации предназначен для рестарта процесса моделирования. На этом этапе, в соответствии с заданными начальными условиями процесса моделирования, инициализируются все внутренние объекты программы и комплекс переводится в режим ожидания старта моделирования.
Вычислительный блок реализует процесс интегрирования системы дифференциальных уравнений движения ЛА и цели, а также уравнений, описывающих динамику контуров стабилизации и наведения в соответствии с моделями и алгоритмами, детально описанных в / /.
Блок визуализации позволяет графически представлять процесс моделирования полета ЛА в соответствующих окнах программы, а кроме того, сохранять полученные результаты в текстовом ASCII файле.
Блок сервисных функций предназначен для вызова необходимых внешних утилит и приложений. В настоящий момент в рамках данного блока реализовано приложение «Table Approximator», позволяющее аппроксимировать табличные данные, представленные в виде ASCII файла полиномами Чебышева, с целью последующего использования в ПМО. Необходимо отметить, что такой способ представления табличных данных позволяет существенно повысить вычислительную эффективность ПМО, а также «сгладить» экспериментальные зависимости, описывающие эволюцию того или иного параметра или коэффициента. В рамках данного комплекса все аэродинамические коэффициенты, а также профиль атмосферы Земли в диапазоне от 0 до 150 км. представлены в виде коэффициентов полиномов Чебышева.
Руководство пользователя (описание интерфейса)
Для старта программного комплекса пользователь должен вызвать через Microsoft Explorer или иным способом запустить исполняемый файл "aams.exe", находящийся в корневой директории проекта (например: "c:\aams\aams.exe").
После запуска данного файла на рабочем столе пользователя отображается главное окно программы, показанное на рис. 7.2. Непосредственно после старта пользователю доступны пункты меню "Project", "Tools" и "Help". Меню "Project" предназначено для работы с файлом проекта. Изначально в данном меню пользователь имеет альтернативу: либо выбрать файл проекта из имеющихся (пункт "Select Proejct"), либо закончить работу программы (пункт "Exit"). В первом случае открывается стандартное диалоговое окно Windows, предлагающее выбрать имя файла проекта (рис. 7.3). Необходимо заметить, что вид данного диалогового окна зависит от версии Windows и национального языка версии. В качестве базового директория для файла проекта по умолчанию предлагается корневой директорий проекта ("c:\aams\"). Здесь содержится базовый файл проекта ("test.prj")
Рис. 7.2
П
Рис. 7.3
При выборе опции "Save Project" пользователь имеет возможность сохранить файл проекта под другим именем с целью внесения необходимых изменений в соответствии с вариантами моделирования. В этом случае открывается стандартное диалоговое окно Windows, предлагающее задать новое имя файла проекта (рис. 7.4). Необходимо заметить, что вид данного диалогового окна зависит от версии Windows и национального языка версии. В качестве базового директория для файла проекта по умолчанию предлагается корневой директорий проекта ("c:\aams\").
Опция "View/Edit Project" предназначена для просмотра и редактирования файла проекта, представляющего собой текстовый ASCII файл в формате Windows-“ini” файла (т.е. файла, каждая строка которого формируется по принципу: «параметр=значение») и содержащий все необходимые значения коэффициентов моделей движения ЛА и цели, алгоритмов работы контуров стабилизации и наведения, переключателей режимов полета ЛА, маневров цели, имена файлов с аэродинамическими коэффициентами и т.п. При активизации этой опции открывается диалоговое окно, представленное на рис. 7.5.
В данном окне пользователь должен установить требуемые значения констант и параметров, соответствующих режиму моделирования. Необходимо отметить, что в случае изменения идентификаторов параметров будут использованы значения по умолчанию.
Рис. 7.4
Н
Рис. 7.5
Таблица 1
|
Идентификатор параметра |
Расшифровка |
Ед. изм. |
Значение по умолчанию |
|
Секция "IC" | |||
|
IniAlt |
Начальная высота ЛА и цели |
м. |
1000 |
|
IniY |
Начальная координата Y ЛА |
м. |
0 |
|
IniZ |
Начальная координата Z ЛА |
м. |
0 |
|
IniVx |
Начальная скорость Vx ЛА |
м/c. |
300 |
|
IniVy |
Начальная скорость Vy ЛА |
м/c. |
0 |
|
IniVz |
Начальная скорость Vz ЛА |
м/c. |
0 |
|
Iniwx |
Начальная угловая скорость wx ЛА |
/с. |
0 |
|
Iniwy |
Начальная угловая скорость wy ЛА |
/с. |
0 |
|
Iniwz |
Начальная угловая скорость wz ЛА |
/с. |
0 |
|
IniPitch |
Начальный угол тангажа ЛА |
град. |
0 |
|
IniYaw |
Начальный угол рысканья ЛА |
град. |
0 |
|
IniRoll |
Начальный угол крена ЛА |
град. |
-45 |
|
AeroDY |
Угол отклонения аэродинамических рулей в канале Y (действует только в режиме неуправляемого движения) |
град. |
0 |
|
AeroDZ |
Угол отклонения аэродинамических рулей в канале Z (действует только в режиме неуправляемого движения) |
град. |
0 |
|
AeroE |
Угол отклонения элеронов (действует только в режиме неуправляемого движения) |
град. |
0 |
|
TDY |
Угол отклонения газодинамических рулей в канале Y (действует только в режиме неуправляемого движения) |
град. |
0 |
|
TDZ |
Угол отклонения газодинамических рулей в канале Z (действует только в режиме неуправляемого движения) |
град. |
0 |
|
Идентификатор параметра |
Расшифровка |
Ед. изм. |
Значение по умолчанию |
|
GuidNY |
Требуемая перегрузка в канале Y (действует только в режиме проверки контура стабилизации) |
|
0 |
|
GuidNZ |
Требуемая перегрузка в канале Z (действует только в режиме проверки контура стабилизации) |
|
0 |
|
MotionMode |
Режим полета ЛА: 0 - неуправляемое движение; 1 - проверка контура стабилизации; 2 - проверка контура наведения. |
|
0 |
|
Секция "СontrolSystem" | |||
|
TAVS |
Постоянная времени датчика угловой скорости |
с. |
0.02 |
|
KsiAVS |
Коэффициент демпфирования датчика угловой скорости |
|
0.3 |
|
MaxAVS |
Максимальное значение измерения угловой скорости |
/с. |
400 |
|
TAcc |
Постоянная времени датчика линейных ускорений |
с. |
0.0012 |
|
KsiAcc |
Коэффициент демпфирования датчика линейных ускорений |
|
0.8 |
|
MaxAcc |
Максимальное значение измерения линейных ускорений |
|
50 |
|
TAAS |
Постоянная времени датчика угла атаки (неизменяемая часть) |
с. |
3.13 |
|
KsiAAS |
Коэффициент демпфирования датчика угла атаки (неизменяемая часть) |
|
0.5 |
|
MaxAAS |
Максимальное значение измерения угла атаки |
град. |
60 |
|
T3 |
Постоянная
времени T3(формирование значения |
с. |
0.003 |
|
T7 |
Постоянная
времени T7(формирование значения |
с. |
0.2 |
|
T25 |
Постоянная времени T25 (апериодическое звено в фильтре Ф2) |
с. |
0.003 |
|
Kwa |
Коэффициент
|
|
0.15 |
|
Идентификатор параметра |
Расшифровка |
Ед. изм. |
Значение по умолчанию |
|
Kdwa |
Коэффициент
|
|
0.07 |
|
Aref |
Значение максимального угла атаки в фильтре Ф2 |
град. |
28 |
|
T9 |
Постоянная
времени T9(формирование значения |
с. |
0.0225 |
|
T10 |
Постоянная
времени T10(формирование значения |
с. |
0.0025 |
|
Kalpha |
Коэффициент усиления кругового ограничения по углу атаки в фильтре Ф2 |
|
0.15 |
|
MaxNCom |
Максимальное значение командной перегрузки в фильтре Ф2 |
|
60 |
|
T21 |
Постоянная
времени T21 (формирование значения |
с. |
0.2 |
|
T24 |
Постоянная
времени T24(формирование значения |
с. |
0.004 |
|
T6 |
Постоянная
времени T6(формирование значения |
с. |
0.0025 |
|
Kn |
Коэффициент усиления по перегрузке при расчете функции Q в фильтре Ф1 |
|
8 |
|
KnS |
Коэффициент
усиления по производной перегрузки
при расчете функции
|
|
0.0165 |
|
Kw |
Коэффициент усиления по угловой скорости при расчете функции Q в фильтре Ф1 |
|
0.45 |
|
KwS |
Коэффициент
усиления по угловой скорости при
расчете функции
|
|
0.04 |
|
Kdw |
Коэффициент усиления по производной угловой скорости при расчете функции Q в фильтре Ф1 |
|
0.0125 |
|
Идентификатор параметра |
Расшифровка |
Ед. изм. |
Значение по умолчанию |
|
KdwS |
Коэффициент
усиления по производной угловой
скорости при расчете функции
|
|
0.0045 |
|
Kcp |
Коэффициент усиления рулевого привода в продольных каналах |
|
44 |
|
T32p |
Постоянная времени рулевого привода в продольных каналах |
с. |
0.0025 |
|
Dmaxp |
Максимальный угол отклонения аэродинамических рулей |
град. |
20 |
|
dDmaxp |
Максимальная угловая скорость отклонения аэродинамических рулей |
/с. |
500 |
|
Kcr |
Коэффициент усиления рулевого привода в канале крена |
|
37 |
|
T32r |
Постоянная времени рулевого привода в канале крена |
с. |
0.0019 |
|
Dmaxr |
Максимальный угол отклонения элеронов |
град. |
20 |
|
dDmaxr |
Максимальная угловая скорость отклонения элеронов |
/с. |
580 |
|
Kwx |
Коэффициент усиления корректирующего звена в канале крена |
|
0.15 |
|
T50 |
Постоянная времени T50корректирующего звена в канале крена |
с. |
0.03 |
|
T51 |
Постоянная времени T51корректирующего звена в канале крена |
с. |
0.0015 |
|
T40 |
Постоянная времени T40корректирующего звена в канале крена |
с. |
0.04 |
|
T41 |
Постоянная времени T41корректирующего звена в канале крена |
с. |
0.1 |
|
Секция "Guidance" | |||
|
MaxGuidW |
Максимальное значение угловой скорости линии визирования |
/с. |
60 |
|
TNav |
Постоянная времени Tnavпеленгатора |
с. |
0.01 |
|
Идентификатор параметра |
Расшифровка |
Ед. изм. |
Значение по умолчанию |
|
DistMode |
Режим возмущений: 0: без учета шумов пеленгатора; 1: с учетом шумов пеленгатора |
|
0 |
|
OmegaRMS |
СКО случайной аддитивной ошибки пеленгатора |
/с. |
0.2 |
|
KFi |
Граница равномерного распределения случайной систематической ошибки пеленгатора |
град. |
0.01 |
|
KcRMS |
СКО случайной систематической ошибки пеленгатора |
/с. |
0.05 |
|
Kg0RMS |
СКО случайной систематической ошибки головки ("не-ноль головки") |
/с. |
0.2 |
|
Секция "Integration" | |||
|
WLoc |
Весовой коэффициент уравнений движения по положению |
|
1 |
|
WVel |
Весовой коэффициент уравнений движения по скорости |
|
10 |
|
WOmega |
Весовой коэффициент уравнений движения по угловой скорости |
|
100 |
|
Wquat |
Весовой коэффициент уравнений движения по компонентам кватерниона |
|
10 |
|
WCS |
Весовой коэффициент уравнений контура стабилизации и наведения |
|
1000 |
|
T0 |
Начало интервала интегрирования |
с. |
0 |
|
Tk |
Конец интервала интегрирования |
с. |
10 |
|
Tolerance |
Локальная погрешность интегрирования |
|
1e-5 |
|
H |
Шаг интегрирования |
с. |
0.0005 |
|
NOutStep |
Кол-во шагов интегрирования, через которое осуществляется вывод результатов |
|
10 |
|
OutPutMode |
Режим вывода результатов: 0: вывод результатов не производится; 1: вывод на каждом шаге интегрирования; 2: вывод через заданное кол-во шагов. |
|
1 |
|
Идентификатор параметра |
Расшифровка |
Ед. изм. |
Значение по умолчанию |
|
OutPut-Destination |
Режим установки устройства вывода: 0: только на экран; 1: на экран и в файл. |
|
0 |
|
Секция "ResultsFile" | |||
|
Name |
Имя файла результатов |
|
Result.dat |
|
Секция "MassInertia" | |||
|
LMissile |
Длина ЛА |
м. |
2.9 |
|
LWing |
Размах крыльев ЛА |
м. |
0.5 |
|
Ba |
Длина САХ ЛА |
м. |
0.69 |
|
Middle |
Площадь миделя |
м2. |
0.0228 |
|
SWing |
Площадь крыльев ЛА |
м2. |
0.233 |
|
M0 |
Начальная масса ЛА |
кг. |
110 |
|
ME |
Масса ЛА в конце активного участка |
кг. |
70 |
|
Jx0 |
Начальный момент инерции ЛА относительно оси X BF |
|
0.53 |
|
JxE |
Mомент инерции ЛА относительно оси X BF в конце активного участка |
|
0.42 |
|
Jz0 |
Начальный момент инерции ЛА относительно оси Y и Z BF |
|
57 |
|
JzE |
Mомент инерции ЛА относительно оси Y и Z BF в конце активного участка |
|
50 |
|
XT0 |
Начальное положение ц.м. ЛА |
м. |
0.59 |
|
XTE |
Положение ц.м. ЛА в конце активного участка |
м. |
0.78 |
|
Ta |
Время выключения ДУ |
с. |
4.5 |
|
Секция "Thrust" | |||
|
P0 |
Начальное значение тяги ДУ |
Н |
20000 |
|
Ta |
Момент времени спада тяги ДУ |
с. |
3.5 |
|
Tк |
Момент времени отсечки тяги ДУ |
с. |
4.5 |
|
LGF |
Плечо газовой силы в начальный момент времени |
м. |
1.25 |
|
Kp |
Коэффициент потери тяги |
|
0.1 |
|
KDeltaG |
Коэффициент учета влияния газодинамических рулей |
|
0.15 |
|
DeltaGMax |
Максимальный угол отклонения газодинамических рулей |
град. |
20 |
|
Идентификатор параметра |
Расшифровка |
Ед. изм. |
Значение по умолчанию |
|
Секция "Aero" | |||
|
AtmoFileName |
Имя файла, содержащего коэффициенты Чебышевского разложения для стандартной атмосферы |
|
"atmo.cfs" |
|
DeltaEMax |
Максимальный угол отклонения элеронов |
град. |
20 |
|
XTIni |
Начальная центровка ЛА |
|
0.53 |
|
Кad |
Коэффициент учета взаимного влияния угла отклонения рулей и угла атаки на силу сопротивления |
|
0.00003 |
|
Cx0FileName |
Имя файла, содержащего коэффициенты Чебышевского разложения для Cx0(коэф. лобового сопротивления) |
|
"cx0.cfs" |
|
CxdFileName |
Имя файла, содержащего коэффициенты Чебышевского разложения для Cxd(коэф. донного сопротивления) |
|
"cxd.cfs" |
|
"cxind.cfs" |
Имя файла, содержащего коэффициенты Чебышевского разложения для Cxind(коэф. индуктивного сопротивления) |
|
|
|
CуFileName |
Имя файла, содержащего коэффициенты Чебышевского разложения для Cу (коэф. подъемной силы) |
|
"cy.cfs" |
|
M4ElFileName |
Имя файла,
содержащего коэффициенты Чебышевского
разложения для
|
|
"m4el.cfs" |
|
MxaFileName |
Имя файла,
содержащего коэффициенты Чебышевского
разложения для
|
|
"mxa.cfs" |
|
MxadeltaFileName |
Имя файла,
содержащего коэффициенты Чебышевского
разложения для
|
|
"mxadelta.cfs" |
|
MxOmxFileName |
Файл, содержащий
коэффициенты Чебышевского разложения |
|
"mxomx.cfs" |
|
Идентификатор параметра |
Расшифровка |
Ед. изм. |
Значение по умолчанию |
|
MzOmzFileName |
Имя файла,
содержащего коэффициенты Чебышевского
разложения для
|
|
"mzomz.cfs" |
|
K0FileName |
Имя файла, содержащего коэффициенты Чебышевского разложения для коэффициента учета влияния угла атаки на силу сопротивления |
|
"k0.cfs" |
|
KdFileName |
Имя файла, содержащего коэффициенты Чебышевского разложения для коэффициента учета влияния углов отклонения рулей на силу сопротивления |
|
"kd.cfs" |
|
KdeFileName |
Имя файла, содержащего коэффициенты Чебышевского разложения для коэффициента учета влияния углов отклонения элеронов на силу сопротивления |
|
"kde.cfs" |
|
MzaFileName |
Имя файла,
содержащего коэффициенты Чебышевского
разложения для
|
|
"mza.cfs" |
|
Mzdp20FileName |
Имя файла,
содержащего коэффициенты Чебышевского
разложения для
|
|
"mzd_20.cfs" |
|
Mzdm20FileName |
Имя файла,
содержащего коэффициенты Чебышевского
разложения для
|
|
"mzd-20.cfs" |
|
Секция "Gravi" | |||
|
G0 |
Значение ускорения свободного падения на поверхности Земли |
м/с2 |
9.81 |
|
Секция "Target" | |||
|
Range |
Дальность до цели в начальный момент времени |
м. |
5000 |
|
Azimuth |
Начальный азимут (пеленг в горизонте) цели |
град. |
0 |
|
Delta |
Начальная элевация (пеленг в вертикали) цели |
град. |
0 |
|
Идентификатор параметра |
Расшифровка |
Ед. изм. |
Значение по умолчанию |
|
VT |
Модуль скорости цели в начальный момент времени |
м/с |
300 |
|
Theta |
Угол наклона вектора скорости цели к горизонту в начальный момент времени |
град. |
0 |
|
Fi |
Ракурс цели в начальный момент времени |
град. |
0 |
|
Nx |
Значение продольной перегрузки цели |
|
0 |
|
Ny |
Значение перегрузки вдоль оси Y цели |
|
0 |
|
Nz |
Значение перегрузки вдоль оси Z цели |
|
0 |
|
TBM |
Момент времени начала маневра цели |
с. |
0 |
|
TEM |
Момент времени окончания маневра цели |
с. |
20 |
|
Omega |
Угловая скорость вращения вектора перегрузки цели |
рад/с |
3 |
|
MotionMode |
Вид маневра цели |
|
0 |
Таким образом, отредактировав требуемые значения параметров, пользователь сохраняет файл проекта и вызывает опцию "Attach Project". При этом, в соответствии с файлом проекта инициализируются все внутренние объекты программы и ПК переходит в режим ожидания моделирования. При этом активизируется меню "Simulation" и кнопки управления процессом моделирования, расположенные в правом нижнем углу панели управления программы. При активизации опции "Start" меню "Simulation" или нажатии на кнопку "Start" стартует процесс моделирования. При этом изменяется значение текущего времени (левый нижний угол панели управления программы) и на странице "Numerical Values" (см. рис. 7.6) изменяются значения вектора состояния и основных параметров движения, системы стабилизации и наведения. В этом окне выводимая информация объединена по следующим группам:
"CenterofMassMotion" – отображаются числовые значения компонент векторов положения и скорости ЛА и цели вIFи эволюцию компонент вектора перегрузки в продольных каналах в BF:
X,Y,Z,Xtrg,Ytrg,Ztrg- компоненты векторов положения ЛА и цели вIF(м.);
VX,VY,VZ,VXtrg,VYtrg,VZtrg- компоненты векторов скорости ЛА и цели вIF(м/с.).
"Angularmotion" - отображаются числовые значения углов Эйлера (,,), соответствующих угловых скоростей (,,) и компонент векторов угловой скорости ЛА (x,y,z) в BF.
"Aerodynamics" отображаются числовые значения углов атаки ЛА (пространственного
 и в продольных каналах -
и в продольных каналах - ),
а также пространственного угла крена
(FiS), числа Маха (Mach)
и скоростного напора (q).
),
а также пространственного угла крена
(FiS), числа Маха (Mach)
и скоростного напора (q)."Measurement’s" - отображаются числовые значения измерений, осуществляемых датчиками угловых скоростей (x,y,z), датчиками угла атаки (
 )
и акселерометрами (Nx,Ny).
)
и акселерометрами (Nx,Ny)."ControlSystem" - отображаются числовые значения основных параметров контура стабилизации: компонент вектора командной перегрузки в продольных каналах (Ncomy,Ncomz), углов отклонения элеронов (ADEler), аэродинамических (ADy,ADz) и газодинамических рулей (TDy,TDz) в продольных каналах.
"GuidanceSystem" - отображаются числовые значения основных параметров контура наведения: компонент вектора перегрузки наведения (выходной сигнал контура) в продольных каналах (Nguidy,Nguidz), относительную дальность (DRel) и скорости (VRel) ЛА-цель, компоненты вектора угловой скорости линии визирования цели в продольных каналах в антенной СК (Omy,Omz), текущее значение промаха (Curh) и время, оставшееся до выполнения целевой задачи (TStop), а также углы пеленга цели вIF(FiY,FiZ).
При активизации опции "Pause" меню "Simulation" или нажатии на кнопку "Pause" процесс моделирования приостанавливается и пользователь, переключаясь между страницами главного окна программы, может просмотреть графические зависимости, иллюстрирующие эволюцию основных параметров моделирования. В принципе, находясь на открытом графической странице, можно продолжать моделирование нажав на кнопку "Start", однако это вызовет замедление счета, и лучше перед продолжением моделирования, переключится на страницу "Numerical Values". По завершении процесса моделирования в строке статуса появляется соответствующее сообщение: "Project completed… Target Destroy." - в случае успешного выполнения целевой задачи, или, "Project completed… Guidance failed…" - при срыве процесса наведения. После этого пользователь может повторить расчет, изменив исходные данные в файле проекта. Среди информации, представленной графическими зависимостями отметим следующее:
Страница "CenterofMassMotion" (рис. 7.7) представляет эволюцию компонент векторов положения и скорости ЛА вIFи эволюцию компонент вектора перегрузки в продольных каналах в BF.
Страница "Angularmotion" (рис. 7.8) представляет эволюцию углов Эйлера (,,), соответствующих угловых скоростей (
 )
и компонент векторов угловой скорости
ЛА в BF.
)
и компонент векторов угловой скорости
ЛА в BF.Страница "Aerodynamics" (рис. 7.9) представляет эволюцию углов атаки ЛА (пространственного
 и в продольных каналах -
и в продольных каналах - ).
).Страница "Measurement’s" (рис. 7.10) представляет эволюцию измерений, осуществляемых датчиками угловых скоростей (x,y,z), датчиками угла атаки (
 )
и акселерометрами (Nx,Ny).
)
и акселерометрами (Nx,Ny).Страница "ControlSystem" (рис. 7.11) представляет эволюцию основных параметров контура стабилизации: командную перегрузку в продольных каналах, углы отклонения элеронов, аэродинамических и газодинамических рулей в продольных каналах.
Страница "ТаrgetMotion" (рис. 7.12) представляет эволюцию компонент векторов положения и скорости цели вIF.
Страница "GuidanceSystem" (рис. 7.13) представляет эволюцию основных параметров контура наведения: перегрузку наведения (выходной сигнал контура), компоненты вектора угловой скорости линии визирования цели в продольных каналах в антенной СК, относительную дальность ЛА-цель и текущее значение промаха.
Страница "Disturbances" (рис. 7.14) представляет эволюцию случайного процесса (шум пеленгатора).
Необходимо отметить, что при установке в файле проекта параметра OutPutDestination= 1, одновременно с выводом результатов моделирования на экран осуществляется запись в файл, представляющий собой обычный текстовыйASCIIфайл, где содержатся значения вышеперечисленных результатов моделирования на соответствующий момент времени, разделенные пробелом. Это позволяет использовать данную информацию для построения графиков стандартными коммерческими пакетами типаMicrosoftExcel,Grapher,CorelChartи т.п.
Рис. 7.6
Рис. 7.7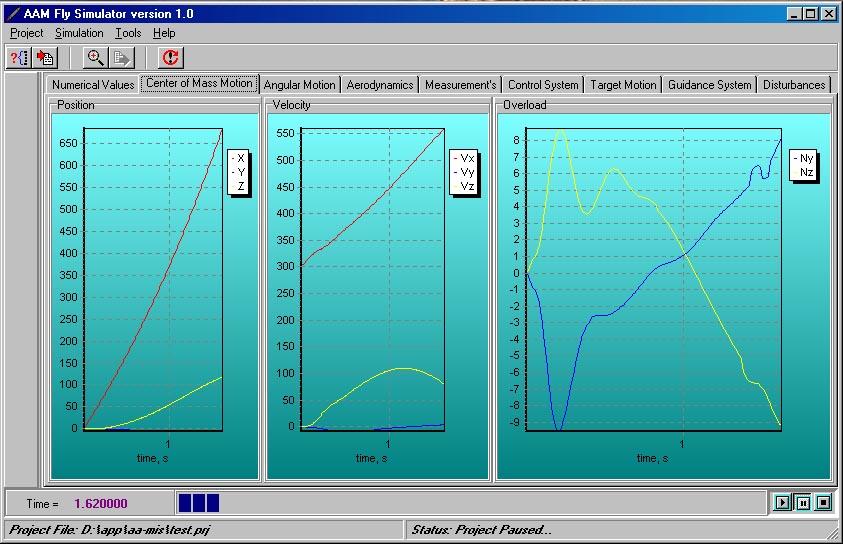
Рис. 7.8
Рис. 7.9
Рис. 7.10

Рис. 7.11
Рис. 7.12
Рис. 7.13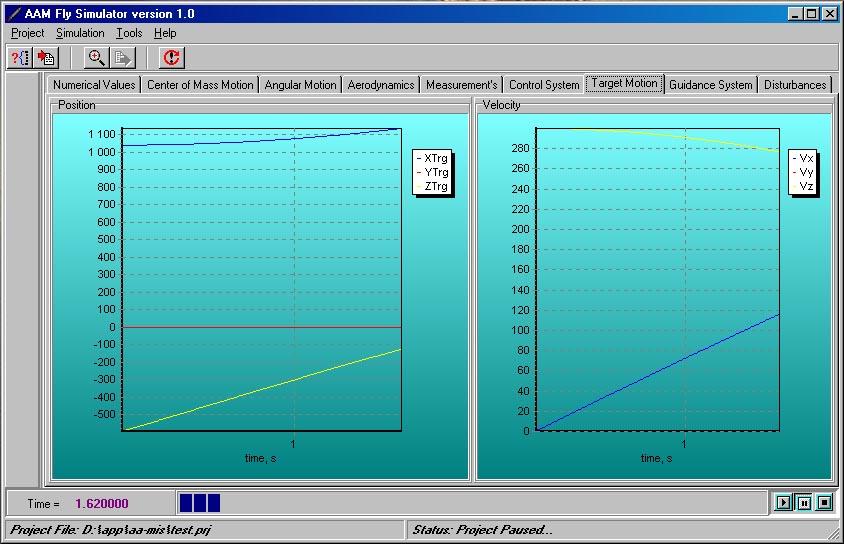

Рис. 7.14
ПОРЯДОК ПРЕДСТАВЛЕНИЯ ОТЧЕТА.
Формирование вариантов заданий осуществляется пользователем с использованием возможностей настройки условий моделирования, предлагаемых программным комплексом.
Пользователь должен вызвать через Microsoft Explorer или иным способом запустить исполняемый файл "aams.exe", находящийся в корневой директории проекта (например: "c:\aams\aams.exe"). После этого пользователь с использованием опции "SelectProject" меню "Project" выбирает один из существующих файлов проекта. В корневой директории проекта (например: "c:\aams\") всегда находится базовый файл проекта "test.prj". Его можно использовать для сохранения и(или) модификации в соответствии с требованиями варианта моделирования. Для сохранения файла проекта под другим именем пользователь должен выбрать опцию "SaveProject" меню "Project" и в диалоговом окне сохранения файла выбрать необходимый директорий и задать новое имя файла. Начиная с этого момента файл считается выбранным, о чем символизирует надпись "ProjectFile: «имя файла проекта»" в левом нижнем углу строки состояния. Статус моделирования - "Projectnotattached". Для редактирования и(или) просмотра выбранного файла проекта необходимо воспользоваться опцией "View/EditProject" меню "Project". При этом открывается диалоговое окно, позволяющее просматривать и редактировать файл проекта. Необходимо отметить, что большинство параметров, содержащихся в файле, не требуют корректировки. Так например, не стоит изменять имена файлов с аэродинамическими коэффициентами. Вообще говоря, по умолчанию настройки файла таковы, что для отработки конкретного варианта моделирования требуется изменить лишь начальную высоту и скорость ЛА (секция "IC") и параметры движения цели (секция "Target"). Так например, для отработки тестового режима (см. Таблица 1) пользователь должен изменить следующее:
[IC]
IniAlt = 5000
…
IniVx = 250
IniVy = 0
IniVz = 0
….
MotionMode = 2
…
…
[Target]
Range = 2000
Azimuth = -40
Delta = 0
VT = 250
Theta = 0
Fi = 180
Nx = 0
Ny = 0
Nz = 7.5
TBM = 0
TEM = 20
Omega = 3
MotionMode = 1
Необходимо отметить, что в секции "Integration") особенно внимательно стоит относится к параметруOutPutModeиOutPutDestination. После завершения редактирования или просмотра файла проекта, пользователь должен нажать клавишуOk. В случае наличия изменений в файле пользователя просят подтвердить внесение изменений. Затем пользователь должен подсоединить выбранный файл проекта, активизировав опцию "AttachProject" меню "Project". При этом, в соответствии с файлом проекта инициализируются все внутренние объекты программы и ПК переходит в режим ожидания моделирования. При этом активизируется меню "Simulation" и кнопки управления процессом моделирования, расположенные в правом нижнем углу панели управления программы и статус моделирования - "Projectattached". При активизации опции "Start" меню "Simulation" или нажатии на кнопку "Start" стартует процесс моделирования. При этом изменяется значение текущего времени (левый нижний угол панели управления программы) и на странице "Numerical Values" (см. рис. 6) изменяются значения вектора состояния и основных параметров движения, системы стабилизации и наведения. При активизации опции "Pause" меню "Simulation" или нажатии на кнопку "Pause" процесс моделирования приостанавливается и пользователь, переключаясь между страницами главного окна программы, может просмотреть графические зависимости, иллюстрирующие эволюцию основных параметров моделирования. В принципе, находясь на открытом графической странице, можно продолжать моделирование нажав на кнопку "Start", однако это вызовет замедление счета, и лучше перед продолжением моделирования, переключится на страницу "Numerical Values". По завершении процесса моделирования в строке статуса появляется соответствующее сообщение: "Project completed… Target Destroy." - в случае успешного выполнения целевой задачи, или, "Project completed… Guidance failed…" - при срыве процесса наведения. После этого пользователь может повторить расчет, изменив исходные данные в файле проекта.
Выбор конкретного варианта задания осуществляется выбором соотвествующего файла проекта.
Представление результатов лабораторной работы.
Отчет по выполненной лабораторной работе должен включать следующие данные:
График изменения компонент векторов положения и скорости ЛА в IFи эволюцию компонент вектора перегрузки в продольных каналах в BF.
Графики изменения углов Эйлера (,,), соответствующих угловых скоростей (
 )
и компонент векторов угловой скорости
ЛА в BF.
)
и компонент векторов угловой скорости
ЛА в BF.Графики изменения углов атаки ЛА (пространственного
 и в продольных каналах -
и в продольных каналах - ).
).Графики измерений, осуществляемых датчиками угловых скоростей (x,y,z), датчиками угла атаки (
 )
и акселерометрами (Nx,Ny).
)
и акселерометрами (Nx,Ny).Графики изменений основных параметров контура стабилизации: командную перегрузку в продольных каналах, углы отклонения элеронов, аэродинамических и газодинамических рулей в продольных каналах.
Графики изменений компонент векторов положения и скорости цели в IF.
Графики изменений основных параметров контура наведения: перегрузку наведения (выходной сигнал контура), компоненты вектора угловой скорости линии визирования цели в продольных каналах в антенной СК, относительную дальность ЛА-цель и текущее значение промаха.
ВАРИАНТЫ ЛАБОРАТОРНОЙ РАБОТЫ
ВАРИАНТ№1: Оценить влияние динамических характеристик датчика угловых скоростей (постоянной времени TAVS), используемого в продольном канале системы стабилизации, на точность наведения ракеты (величину промаха) в следующих условиях:
атака в переднюю полусферу на цель, совершающую односторонний горизонтальный маневр (в одну и другую сторону);
атака в переднюю полусферу на цель, совершающую односторонний вертикальный маневр (в одну и другую сторону);
атака в переднюю полусферу на цель, совершающую пространственный маневр;
Расчет промаха проводить для следующих фиксированных значений постоянной времени TAVS:
TAVS =T*AVS, где T*AVS – значение постоянной времени, используемое по умолчанию
TAVS=0,70 T*AVS, что соответствует 10% отклонению реальных характеристик датчика от проектного значения (в сторону уменьшения)
TAVS=0,80 T*AVS, что соответствует 20% отклонению реальных характеристик датчика от проектного значения (в сторону уменьшения).
TAVS=0,90 T*AVS, что соответствует 30% отклонению реальных характеристик датчика от проектного значения (в сторону уменьшения)
TAVS=1,10 T*AVS, что соответствует 10% отклонению реальных характеристик датчика от проектного значения (в сторону увеличения)
TAVS=1,20 T*AVS, что соответствует 20% отклонению реальных характеристик датчика от проектного значения (в сторону увеличения).
TAVS=1,30 T*AVS, что соответствует 30% отклонению реальных характеристик датчика от проектного значения (в сторону увеличения)
ВАРИАНТ№2: Оценить влияние динамических характеристик датчика угловых скоростей (постоянной времени TAVS), используемого в продольном канале системы стабилизации, на точность наведения ракеты (величину промаха) в следующих условиях:
атака в заднюю полусферу на цель, совершающую односторонний горизонтальный маневр (в одну и другую сторону);
атака в заднюю полусферу на цель, совершающую односторонний вертикальный маневр (в одну и другую сторону);
атака в заднюю полусферу на цель, совершающую пространственный маневр;
Расчет промаха проводить для следующих фиксированных значений постоянной времени TAVS:
TAVS =T*AVS, где T*AVS – значение постоянной времени, используемое по умолчанию
TAVS=0,70 T*AVS, что соответствует 10% отклонению реальных характеристик датчика от проектного значения (в сторону уменьшения)
TAVS=0,80 T*AVS, что соответствует 20% отклонению реальных характеристик датчика от проектного значения (в сторону уменьшения).
TAVS=0,90 T*AVS, что соответствует 30% отклонению реальных характеристик датчика от проектного значения (в сторону уменьшения)
TAVS=1,10 T*AVS, что соответствует 10% отклонению реальных характеристик датчика от проектного значения (в сторону увеличения)
TAVS=1,20 T*AVS, что соответствует 20% отклонению реальных характеристик датчика от проектного значения (в сторону увеличения).
TAVS=1,30 T*AVS, что соответствует 30% отклонению реальных характеристик датчика от проектного значения (в сторону увеличения)
ВАРИАНТ№3: Оценить влияние динамических характеристик акселерометра (постоянной времени TAСС), используемого в продольном канале системы стабилизации, на точность наведения ракеты (величину промаха) в следующих условиях:
атака в переднюю полусферу на цель, совершающую односторонний горизонтальный маневр (в одну и другую сторону);
атака в переднюю полусферу на цель, совершающую односторонний вертикальный маневр (в одну и другую сторону);
атака в переднюю полусферу на цель, совершающую пространственный маневр;
Расчет доверительного интервала для средних значений промаха проводить для трех фиксированных значений постоянной времени TAСС:
TAСС =T*AСС, где T*AСС – значение постоянной времени, используемое по умолчанию
TAСС=1,10 T*AСС , что соответствует 10% отклонению реальных характеристик акселерометра от проектного значения (в сторону увеличения)
TAСС=1,20 T*AСС, что соответствует 20% отклонению реальных характеристик акселерометра от проектного значения (в сторону увеличения).
TAСС=1,30 T*AСС , что соответствует 10% отклонению реальных характеристик акселерометра от проектного значения (в сторону увеличения)
TAСС=0,90 T*AСС , что соответствует 10% отклонению реальных характеристик акселерометра от проектного значения (в сторону уменьшения)
TAСС=0,80 T*AСС, что соответствует 20% отклонению реальных характеристик акселерометра от проектного значения (в сторону уменьшения).
TAСС=0,70 T*AСС , что соответствует 10% отклонению реальных характеристик акселерометра от проектного значения (в сторону уменьшения)
ВАРИАНТ№4: Оценить влияние динамических характеристик акселерометра (постоянной времени TAСС), используемого в продольном канале системы стабилизации, на точность наведения ракеты (величину промаха) в следующих условиях:
атака в заднюю полусферу на цель, совершающую односторонний горизонтальный маневр (в одну и другую сторону);
атака в заднюю полусферу на цель, совершающую односторонний вертикальный маневр (в одну и другую сторону);
атака в заднюю полусферу на цель, совершающую пространственный маневр;
Расчет доверительного интервала для средних значений промаха проводить для следующих значений постоянной времени TAСС:
TAСС =T*AСС, где T*AСС – значение постоянной времени, используемое по умолчанию
TAСС=1,10 T*AСС , что соответствует 10% отклонению реальных характеристик акселерометра от проектного значения (в сторону увеличения)
TAСС=1,20 T*AСС, что соответствует 20% отклонению реальных характеристик акселерометра от проектного значения (в сторону увеличения).
TAСС=1,30 T*AСС , что соответствует 10% отклонению реальных характеристик акселерометра от проектного значения (в сторону увеличения)
TAСС=0,90 T*AСС , что соответствует 10% отклонению реальных характеристик акселерометра от проектного значения (в сторону уменьшения)
TAСС=0,80 T*AСС, что соответствует 20% отклонению реальных характеристик акселерометра от проектного значения (в сторону уменьшения).
TAСС=0,70 T*AСС , что соответствует 10% отклонению реальных характеристик акселерометра от проектного значения (в сторону уменьшения)
ВАРИАНТ№5: Оценить влияние динамических характеристик акселерометра (коэффициент демпфирования AСС), используемого в продольном канале системы стабилизации, на точность наведения ракеты (величину промаха) в следующих условиях:
атака в переднюю полусферу на цель, совершающую односторонний горизонтальный маневр (в одну и другую сторону);
атака в переднюю полусферу на цель, совершающую односторонний вертикальный маневр (в одну и другую сторону);
атака в переднюю полусферу на цель, совершающую пространственный маневр;
Расчет доверительного интервала для средних значений промаха проводить для следующих значений постоянной времени AСС:
AСС =*AСС, где *AСС – значение коэффициента демпфирования, используемое по умолчанию
AСС=1,10 *AСС , что соответствует 10% отклонению реальных характеристик датчика от проектного значения (в сторону увеличения)
AСС=1,20 *AСС, что соответствует 20% отклонению реальных характеристик датчика от проектного значения (в сторону увеличения).
AСС=1,30 *AСС, что соответствует 30% отклонению реальных характеристик датчика от проектного значения (в сторону увеличения).
AСС=0,90 *AСС , что соответствует 10% отклонению реальных характеристик датчика от проектного значения (в сторону уменьшения)
AСС=0,80 *AСС, что соответствует 20% отклонению реальных характеристик датчика от проектного значения (в сторону уменьшения).
AСС=0,70 *AСС, что соответствует 30% отклонению реальных характеристик датчика от проектного значения (в сторону уменьшения).
ВАРИАНТ№6: Оценить влияние динамических характеристик акселерометра (коэффициент демпфирования AСС), используемого в продольном канале системы стабилизации, на точность наведения ракеты (величину промаха) в следующих условиях:
атака в заднюю полусферу на цель, совершающую односторонний горизонтальный маневр (в одну и другую сторону);
атака в заднюю полусферу на цель, совершающую односторонний вертикальный маневр (в одну и другую сторону);
атака в заднюю полусферу на цель, совершающую пространственный маневр;
Расчет значений промаха проводить для следующих значений постоянной времени AСС:
AСС =*AСС, где *AСС – значение коэффициента демпфирования, используемое по умолчанию
AСС=1,10 *AСС , что соответствует 10% отклонению реальных характеристик датчика от проектного значения (в сторону увеличения)
AСС=1,20 *AСС, что соответствует 20% отклонению реальных характеристик датчика от проектного значения (в сторону увеличения).
AСС=1,30 *AСС, что соответствует 30% отклонению реальных характеристик датчика от проектного значения (в сторону увеличения).
AСС=0,90 *AСС , что соответствует 10% отклонению реальных характеристик датчика от проектного значения (в сторону уменьшения)
AСС=0,80 *AСС, что соответствует 20% отклонению реальных характеристик датчика от проектного значения (в сторону уменьшения).
AСС=0,70 *AСС, что соответствует 30% отклонению реальных характеристик датчика от проектного значения (в сторону уменьшения).
ВАРИАНТ№7: Оценить влияние динамических свойств координатора (пеленгатора) цели (постоянной времени TNAV пеленгатора) на точность наведения в следующих условиях:
атака в переднюю полусферу на цель, совершающую односторонний горизонтальный маневр (в одну и другую сторону);
атака в переднюю полусферу на цель, совершающую односторонний вертикальный маневр (в одну и другую сторону);
атака в переднюю полусферу на цель, совершающую пространственный маневр;
Расчет значений промаха проводить для следующих фиксированных значений постоянной времени пеленгатора TNAV:
TNAV = T*NAV, где T*NAV – значение постоянной времени пеленгатора, используемое по умолчанию
TNAV =1,10 T*NAV, что соответствует 10% отклонению реальных характеристик пеленгатора от проектного значения (в сторону увеличения)
TNAV =1,20 T*NAV, что соответствует 20% отклонению реальных характеристик пеленгатора от проектного значения (в сторону увеличения).
TNAV =1,30 T*NAV, что соответствует 30% отклонению реальных характеристик пеленгатора от проектного значения (в сторону увеличения).
TNAV =0,90 T*NAV, что соответствует 10% отклонению реальных характеристик пеленгатора от проектного значения (в сторону уменьшения)
TNAV =0,80 T*NAV, что соответствует 20% отклонению реальных характеристик пеленгатора от проектного значения (в сторону уменьшения).
TNAV =0,70 T*NAV, что соответствует 30% отклонению реальных характеристик пеленгатора от проектного значения (в сторону уменьшения).
ВАРИАНТ№8: Оценить влияние динамических свойств координатора (пеленгатора) цели (постоянной времени TNAV пеленгатора) на точность наведения в следующих условиях:
атака в заднюю полусферу на цель, совершающую односторонний горизонтальный маневр (в одну и другую сторону);
атака в заднюю полусферу на цель, совершающую односторонний вертикальный маневр (в одну и другую сторону);
атака в заднюю полусферу на цель, совершающую пространственный маневр;
Расчет значений промаха проводить для следующих фиксированных значений постоянной времени пеленгатора TNAV:
TNAV = T*NAV, где T*NAV – значение постоянной времени пеленгатора, используемое по умолчанию
TNAV =1,10 T*NAV, что соответствует 10% отклонению реальных характеристик пеленгатора от проектного значения (в сторону увеличения)
TNAV =1,20 T*NAV, что соответствует 20% отклонению реальных характеристик пеленгатора от проектного значения (в сторону увеличения).
TNAV =1,30 T*NAV, что соответствует 30% отклонению реальных характеристик пеленгатора от проектного значения (в сторону увеличения).
TNAV =0,90 T*NAV, что соответствует 10% отклонению реальных характеристик пеленгатора от проектного значения (в сторону уменьшения)
TNAV =0,80 T*NAV, что соответствует 20% отклонению реальных характеристик пеленгатора от проектного значения (в сторону уменьшения).
TNAV =0,70 T*NAV, что соответствует 30% отклонению реальных характеристик пеленгатора от проектного значения (в сторону уменьшения).