

Форматы файлов
Планировщик работы НИП использует следующие файлы, создаваемые программой МДС:
[Time]
IniZonalDateTime=35897
dZT=0
[Integration]
TEnd=174186
Tolerance=1E-12
[Approximation]
Degree=8
Range=1000
[Model]
Style=1
GEM Degree=4
[Spacecraft]
Name=SSR-01
Mass=1400
Drag Coef=0
Refl Coef=0
Ref Area=1
[Classical]
Ascending Node=0
Inclination=0
Arg Perigee=180
Alt Perigee=893.919999999988
Eccentricity=8.0886984222592E-16
Latitude=0
Orbit Number=
[Cartesian]
X=7272.057
Y=0
Z=0
Vx=0
Vy=7.40355398557464
Vz=0
Файлы “ddmmyyyyhhmmss.##i” , расположенные в оперативной базе данных, имеют стандартный формат ini-файлов Windows и содержат информацию о начальных условиях для каждого спутника созвездия:Файлы “ddmmyyyyhhmmss.##с” , расположенные в оперативной базе
данных, имеют стандартный формат ini-файлов Windows и содержат информацию об априорных и апостериорных ковариационных матрицах для каждого спутника созвездия:
[PriorCovMatrix]
Kxx=1
Kxy=0
Kyy=1
Kxz=0
Kyz=0
Kzz=1
Kxvx=0
Kyvx=0
Kzvx=0
Kvxvx=0.01
Kxvy=0
Kyvy=0
Kzvy=0
Kvxvy=0
Kvyvy=0.01
Kxvz=0
Kyvz=0
Kzvz=0
Kvxvz=0
Kvyvz=0
Kvzvz=0.01
[PosteriorCovMatrix]
Kxx=22.0202185633063
Kxy=-8.64540579216024
Kyy=4.16700604106776
Kxz=-12.1574657233878
Kyz=4.46683282737339
Kzz=8.2139255292491
Kxvx=0.0183168120713128
Kyvx=-0.00784966333727294
Kzvx=-0.00938126857772069
Kvxvx=1.70061487783356E-5
Kxvy=-0.000946654988553806
Kyvy=0.000434729270229905
Kzvy=0.000305402253480007
Kvxvy=-9.60764139074225E-7
Kvyvy=1.2146267125091E-7
Kxvz=0.00601928619066717
Kyvz=-0.00212393051951083
Kzvz=-0.00417635023338509
Kvxvz=3.92443757868672E-6
Kvyvz=-1.01882204238017E-7
Kvzvz=2.54350516574206E-6
[time,
sec] [Variance of the satellite positioning along the orbit,
km2]
1000 12.123
1060 6.354
………………………………..
Имена файлов сгенерированные Планировщиком работы НИП, сформированы по следующим правилам:
TSNAME##.XXX,
где
TSName - имя НИП,
## - номер эксперимента.
XXX - спецификация выходного файла.
Планировщик генерирует следующие файлы:
Файлы TSNAME##.rz”, расположенные в оперативной базе данных, содержат информацию о зонах радиовидимости каждого из НИП, входящего в текущую сеть НИП, и имеют следующий формат:
[Number of Nav. Session] [Number of visible Slot]
10 1
10 2
11 2
……………………………………
Файлы TSNAME##.sch”, расположенные в оперативной базе данных, содержат информацию о текущем плане работы каждого из НИП, входящего в текущую сеть НИП, и имеют следующий формат:
[Number of Nav. Session]
[Number of visible Slot]
10
1
11
2
11
2
……………………………………
Руководство пользователя.
Исполняемый файл программы “tssch.exe” расположен в главной папке проекта. Этот файл может быть запущен как прямым вызовом, так и двойным щелчком левой клавиши мыши на иконке Планировщик работы сети НИП, которая расположена в папке проекта. После этого появляется главное окно проекта (рис. 6).
Рис. 6. Главное
окно программы
Рис. 7. Информационное
окно

Рис. 8. Окно выбора
созвездия

Рис.9 Окно выбора
навигационного интервала

Рис. 10. Окно
редактирования ковариационной матрицы

Рис. 11. Окно
формирования сети НИП

Когда нажата кнопка “Готово”, эксперимент считается завершенным, окно Ассистента закрывается и опция “Параметры” меню “Эксперимент” так же, как и опция “Зоны обслуживания” меню “Моделирование” становятся доступными. Необходимо отметить, что на каждой стадии создания эксперимента планирования пользователь может вернуться к предыдущему шагу, нажав кнопку “Назад” или может отказаться от создания эксперимента, нажав кнопку “Cancel”.
Рис. 12. Окно задания
свойств эксперимента

Рис. 13. Окно выбора
созвездия

Рис. 14. Окно выбора
эксперимента

Рис. 15. Окно
параметров эксперимента - Созвездие
Рис. 16. Окно
параметров эксперимента - Сеть НИП


На странице “Параметры планирования” (рис. 17) пользователь может редактировать входные данные эксперимента, изменяя значения параметров эксперимента в частях “Условия проведения измерений” и “Режим планирования”. При нажатии кнопки “Ок” Планировщик анализирует все изменения, которые были сделаны, и перегружает все внутренние объекты для нового вычисления, если это необходимо.
Рис. 17. Окно
параметров эксперимента - Параметры
планирования

Рис. 18. Окно
формирования зон радиовидимости
Рис. 19. Окно
просмотра результатов - Зоны радиовидимости
НИП


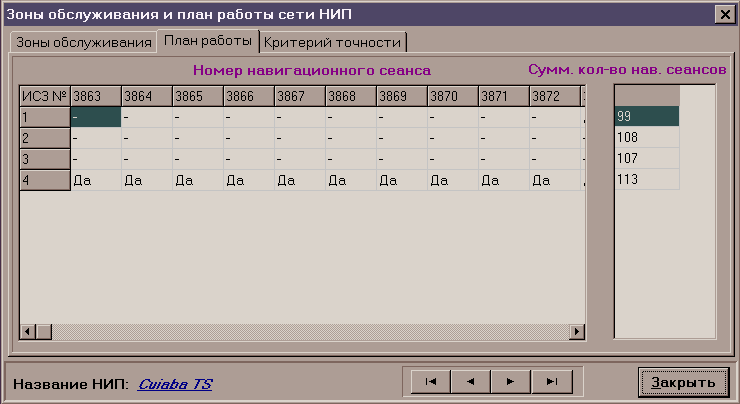
Соответствующие файлы представлены в виде таблицы. Строки таблицы соответствуют слотам выбранного созвездия, тогда как столбцы таблицы соответствуют сеансам наблюдений, подходящим для выполнения измерений по крайней мере для одного созвездия спутников. Если в соответствующей ячейке таблицы расположен знак “-”, то это означает невозможность осуществления сеанса измерений. Наличие “Да” в соответствующей ячейке таблицы означает присутствие данного спутника в зоне радиовидимости данного НИП и, как следствие, возможность осуществления сеанса измерений. Символ “Нет” в ячейке означает принудительное исключение данного спутника пользователем. В первой части страницы расположена таблица, содержащая информацию об общем числе сеансов измерений, выполняемых данным НИП по отношению к каждому созвездию спутников.
Рис. 20. Окно
просмотра результатов - План работы
НИП
Файл с таблицей времени работы НИП используется только для априорного анализа точности определения орбиты созвездия спутников. Таким образом, пользователь может изменять план работы самостоятельно и анализировать возможную точность, выбрав опцию “Априорный анализ точности” в меню “Моделирование”.
После вычисления зон радиовидимости пользователь может выполнить расчет оптимального плана работы сети НИП или же подсчитать априорную точность определения орбиты, согласно существующей таблице времен. В первом случае пользователь, выбрав опцию “Планирование работы сети НИП” в меню “Моделирование”, может вычислить оптимальный план работы сети НИП. Этот процесс отображается полосой прогресс-индикатора. Эволюция критерия оптимальности сохраняется в соответствующем файле, расположенном в служебной базе данных данного созвездия спутников. После завершения вычислений информация об апостериорной матрице ковариации обновляется. Эта информация сохраняется в файле, расположенном в служебной базе данных.
Рис. 21. Окно
просмотра результатов - Критерий
точности

Чтобы выполнить априорный анализ точности определения орбиты созвездия спутников согласно созданному плану работы НИП, необходимо выдрать опцию “Априорный анализ точности” в меню “Моделирование”. Создание апостериорной матрицы ковариации выполняется согласно плану работы сети НИП, и этот процесс отображается полосой прогресс-индикатора. Эволюция критерия оптимальности сохраняется в соответствующем файле, расположенном в служебной базе данных созвездия. После завершения вычислений пользователь может просмотреть сгенерированную таблицу времени работы каждого НИП и может видеть значение критерия оптимальности для каждого созвездия спутников на странице “Критерий точности”.