

Задачи теории автоматического управления
(ПЗ – 2 ч, СРС – 1 ч.)
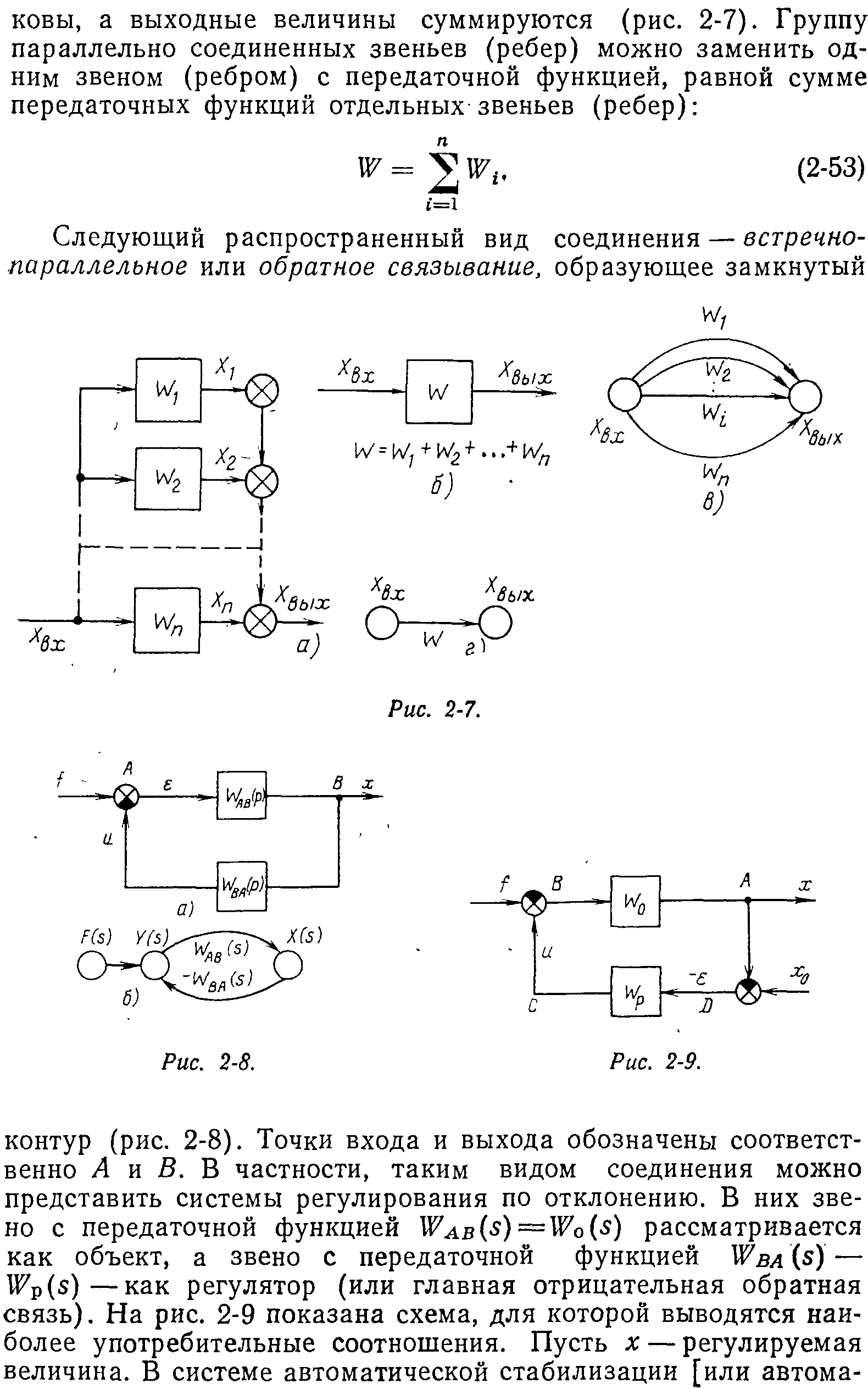
Структурные схемы динамических систем
Построение передаточных функций
Материал данного раздела излагается по монографии [1].






Задачи небесной механики (1)
ПЗ – 4 ч, СРС – 1 ч.
Оскулирующие элементы
Расчет координат ИСЗ на эпоху
Восстановление параметров орбиты
Материал данного раздела излагается по монографии [2].





Задачи
1. Восстановление параметров орбиты (1).Заданы вектор момента количества движения и радиус-вектор КА в апогее. Определить вектор состояния КА, находящегося на невозмущенной эллиптической орбите, на данную эпоху.

2.
Восстановление параметров орбиты (2). В
абсолютной геоцентрической СК заданы
векторы момента количества движения![]() и Лапласа
и Лапласа![]() .
Определить следующие параметры
невозмущенной эллиптической орбиты:
.
Определить следующие параметры
невозмущенной эллиптической орбиты:![]() .
.

3.
Поворот ковариационной матрицы.В
инерциальных осях задана ковариационная
матрица радиус-вектора цели. Угловое
положение ЛА определяется значениями
углов тангажа![]() ,
рыскания
,
рыскания![]() и крена
и крена![]() .
Вычислить координаты ковариационной
матрицы в связанных осях ЛА.
.
Вычислить координаты ковариационной
матрицы в связанных осях ЛА.

4.
Расчет матрицы перехода.Найти матрицу
перехода между СК, поворот одной из
которых относительно другой определен
кватернионом![]() .
.
5. Переход между СК с помощью кватернионов. Определить последовательность координатных переходов между абсолютной геоцентрической СК и орбитальной СК, записать соответствующий кватернион.
6. Поворот к СК собственных осей тензора напряжений.В некоторой СК задан произвольный тензор напряжений своими координатами:
 .
.
Построить
кватернион, определяющий поворот СК к
собственным осям тензора напряжений
![]() .
.
7.
Инспекция. В абсолютной геоцентрической
системе координат (СК) заданы радиус-вектор![]() и вектор скорости
и вектор скорости![]() первого искусственного спутника Земли
(ИСЗ-1). В орбитальной СК этого ИСЗ заданы
радиус-вектор
первого искусственного спутника Земли
(ИСЗ-1). В орбитальной СК этого ИСЗ заданы
радиус-вектор![]() и вектор скорости
и вектор скорости![]() другого ИСЗ-2. Оба ИСЗ движутся по
невозмущенным эллиптическим орбитам.
Требуется построить:
другого ИСЗ-2. Оба ИСЗ движутся по
невозмущенным эллиптическим орбитам.
Требуется построить:
а) компоненты кватерниона, определяющего переход от орбитальной СК ИСЗ-1 к орбитальной СК ИСЗ-2.
б) компоненты кватерниона, определяющего переход от геоцентрической СК к орбитальной СК ИСЗ-2.

Задачи небесной механики (2)
ПЗ – 2 ч, СРС – 0 ч.
Вычисление положения Луны и Солнца
Материал данного раздела излагается, главным образом, по монографии [2]



Общий алгоритм вычисления положения Луны (Солнца) может быть представлен диаграммой:

Задачи теории вероятностей
ПЗ – 2 ч, СРС – 0 ч.
Многомерная плотность распределения случайной величины
Построение эллипсоида рассеивания для заданного уровня доверительной вероятности
Случайные векторы
Проблема, решение которой описано в настоящем подразделе, состоит в моделировании вектора коррелированных между собой гауссовских случайных величин.
Пусть случайный вектор
![]() ,
подлежащий моделированию, формируется
на основе преобразования вектора
стандартных некоррелированных случайных
величин
,
подлежащий моделированию, формируется
на основе преобразования вектора
стандартных некоррелированных случайных
величин![]() соответствующей размерности следующим
образом:
соответствующей размерности следующим
образом:
![]() ,
,
где
![]() – вектор математического ожидания
– вектор математического ожидания![]() ;
;![]() – матрица коэффициентов, подлежащих
определению.
– матрица коэффициентов, подлежащих
определению.
Как известно,
ковариационная матрица вектора
![]() ,
отвечающего приведенной выше зависимости,
может быть определена на основе следующего
соотношения:
,
отвечающего приведенной выше зависимости,
может быть определена на основе следующего
соотношения:
![]() .
.
Пусть матрица
![]() имеет вид:
имеет вид:
 .
.
Тогда, приравнивая
левую и правую части уравнения поэлементно,
для каждого
![]() из, например, нижнего треугольника,
получим совокупность
из, например, нижнего треугольника,
получим совокупность![]() уравнений вида:
уравнений вида:

Разрешая полученные
уравнения относительно элементов
матрицы
![]() ,
получим окончательные соотношения:
,
получим окончательные соотношения:

Т.о. для получения
вектора коррелированных случайных
величин необходимо вычислить элементы
матрицы
![]() в соответствии с приведенными выше
формулами и сгенерировать реализации
элементов вектора гауссовских случайных
некоррелированных величин
в соответствии с приведенными выше
формулами и сгенерировать реализации
элементов вектора гауссовских случайных
некоррелированных величин![]() ,
после чего воспользоваться исходным
соотношением подраздела.
,
после чего воспользоваться исходным
соотношением подраздела.
Нормальное распределение вероятностей n-мерного случайного вектора х описывается формулой

где
![]() — вектор математических ожиданий;
— вектор математических ожиданий;![]() — корреляционная
матрица;
— корреляционная
матрица; ![]() –определитель корреляционной
матрицы.
–определитель корреляционной
матрицы.
В евклидовом n-мерном
пространстве, координатами которого
являются составляющие вектора
![]() ,
плотность вероятности
,
плотность вероятности
![]() постоянна на
концентрических гиперэллипсоидах:
постоянна на
концентрических гиперэллипсоидах:
![]()
называемых гиперэллипсоидами
рассеивания, где С — любое положительное
число. Центром гиперэллипсоидов
рассеивания является точка с координатами
![]() ,
направление главных
осей совпадает с собственными векторами
,
направление главных
осей совпадает с собственными векторами
![]() корреляционной матрицы
корреляционной матрицы
![]() ,
а длина каждой из
главных полуосей равна
,
а длина каждой из
главных полуосей равна ![]() ,
где
,
где ![]() — собственное значение
корреляционной матрицы
— собственное значение
корреляционной матрицы
![]() ,
соответствующее
собственному вектору bi.
,
соответствующее
собственному вектору bi.
В двумерном случае нормальное распределение (1.22) принимает вид

Плотность вероятности постоянна на эллипсах, называемых эллипсами рассеивания. Угол между главной осью эллипса рассеивания и осью Ox1 определяется с помощью выражения
![]()
Если составляющие х1
и х2
вектора
![]() некоррелированы, то
направления главных осей эллипса
рассеивания совпадают с направлениями
осей системы координат Ох1х2.
некоррелированы, то
направления главных осей эллипса
рассеивания совпадают с направлениями
осей системы координат Ох1х2.