


1. ПРИМЕНЕНИЕ МКЭ В ФОРМЕ МЕТОДА ПЕРЕМЕЩЕНИЙ
1.1.Представление стержневой системы как системы соединенных в узлах стержневых элементов
Все стержневые системы (фермы, балки, рамы, арки и другие) при решении основной задачи строительной механики (определение перемещений, усилий и деформаций от заданных внешних воздействий, [1]) можно рассматривать как системы типовых стержневых элементов, соединенных между собой и с основанием в жестких и шарнирных узлах.
Вучебных пособиях [7−10] показано, что типовые элементы для стержневых систем могут иметь различную геометрическую форму, в том числе вид прямолинейного стержня.
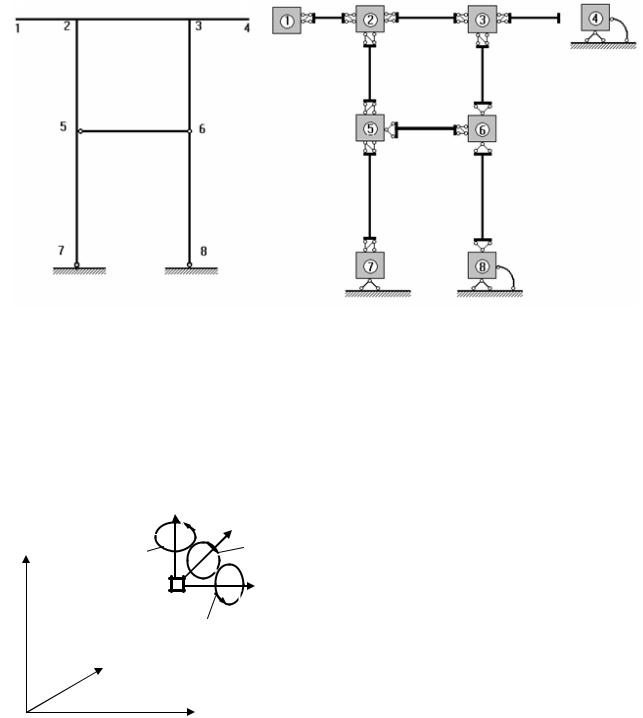
Впрограмме SCAD, где реализуется алгоритм метода конечных элементов в форме метода перемещений, для расчета стержневых систем используются только прямолинейные стержневые элементы. Поэтому, в данном учебном пособии ограничимся вариантом представления стержневой системы только как системы прямолинейных стержневых элементов, соединенных между собой и с основанием узлами (рис. 1.1)*).
Впринципе каждый из стержней рамы, приведенной на рис. 1.1,а, может быть разделен на любое конечное число стержневых элементов отличающихся от приведенных стержней только длиной. На рис. 1.1, б показана расчетная схема рамы, когда рама разбита на минимальное число стержневых элементов (каждый элемент равен длине соответствующего стержня рамы).
На начальной стадии ознакомления с реализацией МКЭ в программе SCAD обратим внимание на следующие три фактора.
1. В МКЭ конечные элемент, на которые разбита стержневая система считаются соединенными не друг с другом, а присоединенными к узлам.
Врасчетной схеме рамы (см. рис. 1.1, б) каждому стержневому элементу соответствуют два узла.
*) Рисунок взят из книги, написанной разработчиками программы SCAD. Учащиеся могут воспользоваться ею в учебном классе ПК кафедры СМ и ТУ.
36
а) |
б) |
Рис. 1.1
2.В МКЭ в форме метода перемещений за неизвестные принимают перемещения всех узлов расчетной схемы по направлениям степеней свободы узлов.
3.Все перемещения узлов определяются в общей системе координат
XYZ, к которой относится расчетная схема стержневой системы (рис. 1.2).
|
|
u3 |
i |
|
|
u2i |
|||
Z (3) |
|
|
|||||||
|
|
|
|
|
|
|
|
u5i |
|
u6i |
|
|
|
||||||
|
|
|
|
u1i |
|||||
|
|
i |
|
|
|
||||
|
|
|
|
||||||
u4i
Y (2)
O |
X (1) |
|
|
|
Рис. 1.2 |
В программе SCAD в документации используются обозначения перемещений (степеней свободы) узлов соответственно в виде X Y, Z, UX, UY и UZ. Их направлениям соответствует нумерация: 1, 2. 3, 4, 5, 6.
На рис 1.2 показаны обозначения соответствующих линейных и угловых перемещений любого жесткого пространственного узла i и их положительные направления, принятые в учебном пособии при рассмотрении
алгоритма МКЭ.
В программе SCAD предполагается, что расчетная схема плоской стержневой системы находится в плоскости XOZ, поэтому положение жесткого узла i на этой плоскости определяется линейными перемещениями
37

u1i , u3i и углом поворота u5i вокруг оси Y. В таблицах с результатами расчетов в программе SCAD эти перемещения соответственно обозначаются в виде X, Z, UY (им соответствует нумерация направлений: 1, 3, 5).
Рассмотрим рис. 1.1,б с точки зрения присоединения (прикрепления) стержневых элементов к отдельным объектам расчетной схемы – узлам внутренними связями.
Стержневой элемент, представляющий собой левую консоль рамы, прикрепляется к каждому из жестких узлов 1 и 2 тремя жесткими связями. Это означает, что линейные перемещения и угол поворота левого и правого концов элемента равны соответственно перемещениям жестких узлов 1 и 2.
Аналогичная схема могла бы быть использована и для правой консоли. Но в приведенном на рис. 1.1,б варианте расчетной схемы рамы правый консольный элемент представлен в виде статически определимого элемента, жестко прикрепленного левым концом к узлу 3. Между правым концом этой консоли и узлом 4 все три внутренние связи удалены, а сам узел 4 считается жестко прикрепленным тремя внешними жесткими связями к жесткому основанию. Для такой схемы представления консоли в результате расчета рамы МКЭ в форме метода перемещений будут определены перемещения только левого конца правой консоли (перемещения отделенного от консоли узла 4 будут нулевыми).
Также жестко прикреплены к узлам 2 и 3 другие элементы рамы.
К узлу 5 (см. рис. 1.1,б) вертикальные элементы крепятся жестко, т.е. тремя связями, а горизонтальный элемент – шарнирно, т.е. двумя связями.
Это соответствует изображению узла 5 в заданной расчетной схеме рамы, когда шарнир явно расположен на горизонтальном стержне (см. рис. 1.1,а).
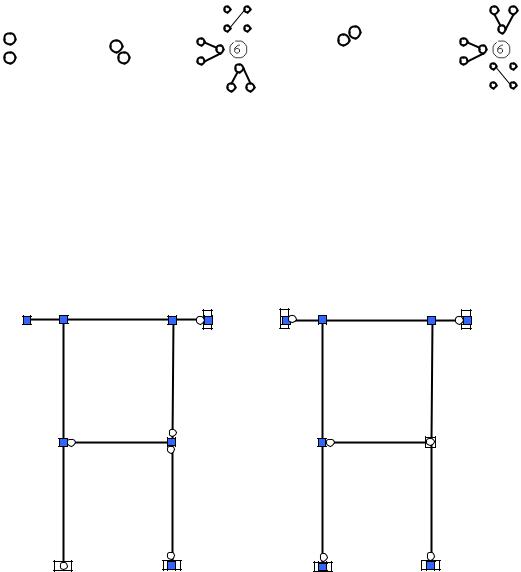
Двойной шарнир в узле 6 заданной рамы (см. рис. 1.1,а) может быть отражен в расчетной схеме рамы для МКЭ по-разному. В варианте расчетной схемы, изображенном на рис. 1.1,б, предполагается, что двойной шарнир в узле 6 представлен в виде двух одиночных шарниров, поставленных на стойках рамы (рис. 1.3,а).
На рис. 1.3,б,г представлены еще два варианта постановки двух одиночных шарниров в узле 6. Если бы были выбраны такие представления узла 6 на заданной раме, то на расчетной схеме, изображенной на рис. 1.1,б им соответствовали бы два варианта прикрепления элементов к узлу 6, показанные на рис. 1.3,в,д.
Шарнирные опоры 7 и 8 на схеме заданной рамы одинаковы. Но на расчетной схеме рамы для МКЭ (см. рис. 1.1, б) они представлены в виде двух
38
различных схем. В расчетной схеме рамы с шарнирной опорой можно применять любую из указанных двух схем, так как обе они описывают шарнирную опору.
а) |
|
б) |
|
в) |
|
|
г) |
|
д) |
|
|
|
|||||||
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.3
При использовании программы SCAD расчетная схема, изображенная на рис. 1.1,б, представляется на экране компьютера в виде, показанном на рис. 1.4,а.
а) |
|
|
|
а) |
|
|
|
1 |
2 |
3 |
4 |
1 |
2 |
3 |
4 |
5 |
6 |
5 |
6 |
7 |
8 |
7 |
8 |
Рис. 1.4
С таким изображением расчетной схемы рамы для использования МКЭ в форме метода перемещений учащийся уже встречался в первой части учебного пособия [2].
Всхеме, изображенной на рис. 1.1,б, жесткие узлы 1, 2, 3, 5, 6 имеют по три степени свободы.
Вузле 7 введены две опорных связи, закрепляющие его от горизонтального и вертикального перемещений. Таким образом, узел 7 имеет только степень свободы – возможность поворачиваться в шарнире вокруг оси
39