

Конструктивная длина механизма больше 4b, где b – ширина зубчатого колеса. Расстояние между неподвижными шестернями В>2b, а именно:
B = 2b + 2t + с,
где t – зазор между сопрягаемыми зубчатыми венцами при нейтральном положении блока, принимаемый обычно не менее 1-3 мм; с – ширина технологической канавки (для выхода зуборезного долбяка).
Ширина канавки и её глубина а принимаются в зависимости от мо-
дуля зацепления (табл. 2.1).
Таблица 2.1
Модуль, мм (≤) |
2 |
4 |
6 |
8 |
|
с, |
для прямозубых колес, мм (≥) |
5 |
6 |
7 |
8 |
а, |
мм (≥) |
0,5 |
1,5 |
2 |
2,5 |
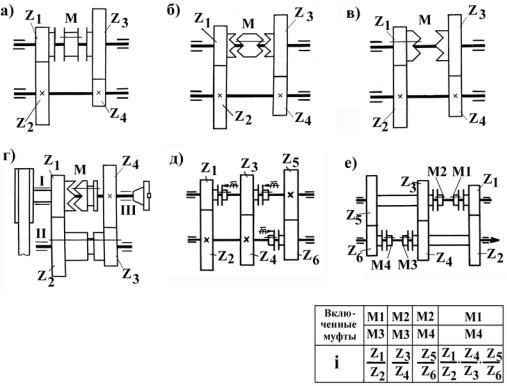
-механизм на 2 скорости c широким передвижным блоком шестерён
(см. рис. 2.6,б). Этот механизм имеет бóльшую длину, чем предыдущий (>6b). Его применение целесообразно, когда действие усилий на валы при включении разных передач должно быть сосредоточено в одном (почти в одном) месте;
-группы передач на 3 скорости (см. рис. 2.6,в,д,е):
i = |
Z1 |
; i |
|
= |
Z3 |
; i |
|
= |
Z5 |
|
Z Z |
|
|
Z |
|
|
||
|
2 |
|
3 |
|
|
1 |
; |
|
3 |
; |
|
5 |
|
|||||
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||
1 |
Z2 |
|
|
Z4 |
|
|
Z6 |
или i = |
Z2 |
Z4 |
|
|
. |
|||||
|
|
|
|
|
|
|
|
|
|
Z6 |
||||||||
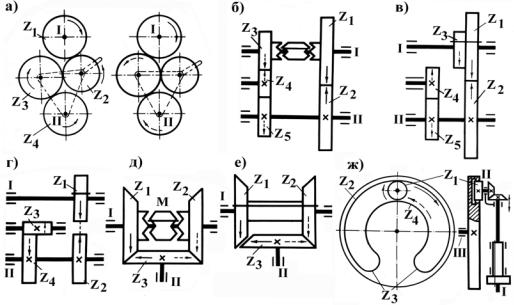
Более распространенный вариант – механизм c узким передвижным блоком шестерён (или блоком-тройкой) Z3-Z5-Z1 (см. рис. 2.6,в). Он применяется, когда разница в числах зубьев соседних венцов Z5−Z3≥5. Если это условие не выдерживается, то при перемещении блока для соединения колёс Z1 и Z2 произойдёт сцепление колеса Z6 одновременно с колёсами Z3 и Z5 (см. рис. 2.6,г). При Z5−Z3<5 применяют механизмы других конструктивных оформлений (см. рис. 2.6,д,е). В случае разделённого блока длина механизма меньше, но необходимо предусматривать блокировочное устройство для невозможности одновременного включения передачи Z3-Z4 с передачей Z1-Z2 либо Z5-Z6. При широком блоке этого не требуется, но длина механизма больше;
- группа передач на 4 скорости обычно выполняется из двух параллельных групп на две скорости (см. рис. 2.6,ж). В этом случае также необходима блокировка от одновременного включения двух передач.
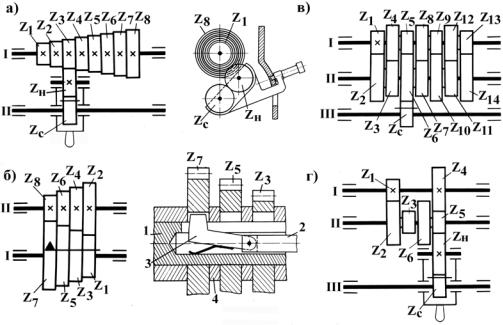
2. В группах передач с муфтами используются сцепные муфты фрикционные, кулачковые, зубчатые. На рис. 2.7 показаны некоторые варианты механизмов:
- группы передач на 2 скорости с двухсторонними муфтами (см. рис. 2.7,а,б);
64
-группа на 2 скорости с односторонней муфтой и передвижным ко-
лесом (см. рис. 2.7,в);
-перебор – трёхваловый механизм на 2 скорости (см. рис. 2.7,г), позволяющий обеспечить значительную редукцию. Передаточные отношения
с вала I на соосный с ним вал III можно представить в виде: |
|
Z1 |
|
Z3 |
|
|
|
. |
|||
|
i = |
Z2 |
Z4 |
; 1 |
|
|
|
|
|
Первое обеспечивается при выключенной муфте М и передаче движения через вал II сцепленными последовательно расположенными зубчатыми парами 1-2 и 3-4. При расцепленных шестернях и включённой муфте вал III вращается вместе с валом I, что равносильно передаточному отношению 1;
Рис. 2.7. Варианты групп передач со сцепными муфтами: а, б – группы
на 2 скорости с двухсторонними муфтами; в – группа на 2 скорости с односторонней муфтой и передвижным колесом; г – перебор на 2 скорости; д, е – группы на 3 и 4 скорости
-группа передач на 3 скорости (см. рис. 2.7,д);
-группа передач на 4 скорости оригинальной конструкции (см. рис. 2.7,е); в ней число пар передач меньше числа обеспечиваемых скоростей, обычно же эти числа равны (см. рис. 2.7,а,б,в,д). Группа имеет четыре односторонних муфты. Передаточные отношения механизма в зависимости от включения муфт приведены в таблице под рисунком.
65
2.2.3. Зубчатые механизмы ступенчатого изменения подач
В приводах подач широко распространены механизмы с передвижными блоками шестерён и муфтами (за исключением переборов), применяемые в приводах главного движения. Кроме того, в них находит применение ряд особых механизмов, не имеющих прочности и жёсткости, необходимых для приводов главного движения, но позволяющих обеспечить либо количество вариантов скоростей большее четырёх, либо значительную редукцию, либо большую компактность и пр. Некоторые варианты таких механизмов показаны на рис. 2.8:
Рис. 2.8. Зубчатые механизмы ступенчатого изменения подач:
а– механизм с накидной шестерней (механизм Нортона); б – механизм
свытяжной или заскакивающей шпонкой: 1 - вал; 2 - тяга; 3 - вытяжная
шпонка; 4 - распорные кольца; в – меандр с передвижной шестерней; г – меандр с накидной шестерней
- механизм Нортона или механизм с зубчатым конусом и накидной шестерней (см. рис. 2.8,а) имеет передвижную каретку с двумя сцепленными шестернями: скользящей Zс и накидной Zн. Накидная шестерня также сцепляется с одной из шестерён т.н. зубчатого ступенчатого конуса (на рисунке в конусе показано 8 шестерён – Z1, Z2, ..., Z8, их может быть до 12, а чаще – 4-6). Для переключения механизма необходимо поворотом каретки расцепить шестерню Zн с колесом конуса, переместить каретку по валу II до нужного колеса и повернуть её для сцепления Zн с ним. Перемещение ка-
66

ретки и её установ в требуемом положении осуществляется рукояткой с фиксатором. Если движение передаётся от вала I к валу II, то механизм обеспечивает передаточные отношения:
i = |
Z1; Z2 ; Z3;...; Z8 |
|
Zс |
= |
Z1; Z2 ; Z3;...; Z8 |
. |
|
Zс |
|
Zн |
|
Zн |
|
Накидная шестерня является связанной (паразитной) и на величину передаточного отношения не влияет. Механизм имеет малое количество шестерён – всего на две больше числа обеспечиваемых им вариантов;
- в механизме с вытяжной или заскакивающей шпонкой (см. рис. 2.8,б) на валах I и II установлены два встречных зубчатых конуса, колёса которых постоянно сцеплены.
Передаточные отношения механизма: i = Z1 ; Z3 ; Z5 ; Z7 .
Z2 Z4 Z6 Z8
Шестерни первого вала имеют свободное соединение с ним, шестерни второго вала – глухое. Крутящий момент с вала 1 передаётся одной из шестерён конуса через выступающую из продольного паза вала подпружиненную шпонку 3. Для соединения другой шестерни с валом 1 шпонка тягой 2 перемещается по валу. Чтобы не произошло одновременного соединения с валом двух шестерён (и заклинивания из-за этого механизма), шестерни разделяются распорными кольцами 4, утапливающими заскакивающую шпонку при её перемещении от одной шестерни к другой.
Число передач в таких механизмах до 10;
- меандр с передвижной шестерней (см. рис. 2.8,в). Меандр – трёх-
валовый механизм, в котором на валу I закреплена шестерня Z1, а другие шестерни, объединённые попарно в блоки Z4-Z5, Z8-Z9, Z12-Z13, установлены свободно, на валу II установлены свободно одинаковые двухвенцовые зубчатые блоки (Z2-Z3 и др.) и шестерня Z14, на валу III находится скользящая (передвижная) шестерня Zс. Шестерня Zс сцепляется с одной из шестерён большего диаметра вала II (Z2, Z6, Z10, Z14). Шестерня, сцепленная с Zс, является паразитной и передаточного отношения не изменяет, в этой связи в трёх последних из четырёх нижеследующих записей передаточных отношений она не указана:
i1 = Z1 Z 2
i3 = Z1 Z 2
|
Z 2 |
= |
|
Z1 |
; |
i 2 = |
||||||
Z c |
Z c |
|||||||||||
|
|
|
|
|
|
|
|
|
||||
|
Z 3 |
|
|
|
Z 5 |
|
|
Z 7 |
|
Z 9 |
||
Z 4 |
|
|
|
Z 8 |
Z c |
|||||||
|
|
|
|
Z 6 |
|
|
||||||
|
Z1 |
|
|
Z 3 |
|
Z 5 |
; |
|
|
|
|
|
||||
|
Z 2 |
|
|
|
Z c |
|
|
|
|
|
||||||
|
|
|
Z 4 |
|
|
|
|
|
|
|
||||||
; |
i4 |
= |
Z1 |
|
Z3 |
|
Z5 |
|
Z7 |
|
Z9 |
|||||
|
|
|
|
Z10 |
||||||||||||
|
|
|
|
|
Z2 |
|
Z4 |
|
|
Z6 |
Z8 |
|||||
Z11 Z13 ; Z12 Zc
- меандр с накидной шестерней (см. рис. 2.8,г) отличается от преды-
дущего механизма наличием вместо передвижной шестерни передвижной
67
каретки с накидной Zн и скользящей Zс шестернями – такой же, как в механизме Нортона. В связи с этим, накидная шестерня может быть сцеплена с любым колесом вала II. Показанный механизм обеспечивает четыре передаточных отношения:
|
Z1 |
|
Z3 ; Z2 |
|
Z4 |
|
Z5 ; Z6 |
|
|
i = |
|
; |
|
. |
|||||
|
Zc |
Z5 |
Zc |
||||||
Z2 |
|
|
|
|
|||||
2.2.4. Сменные зубчатые колёса
Сменные колёса обеспечивают максимальную простоту привода, но требуют значительного времени на их смену. Консольное расположение колёс и скользящая посадка их на валах не обеспечивают высокой жёсткости и точности центрирования. Сменные колёса применяют при окружных скоростях не более 8 м/с.
Используются механизмы с одной парой колёс (т.н. парносменные колёса или однопарные гитары), с двумя парами (т.н. двухпарные гитары или, чаще, гитары сменных шестерён) и более (многопарные гитары).
Со станками, имеющими гитары, поставляются наборы (комплекты) сменных шестерён.
Сменные колёса принято обозначать прописными или строчными буквами латинского или русского алфавитов.
1. Парносменные колёса (рис. 2.9,а) применяются в приводах главного движения, деления и других ряда автоматов, специальных и специализированных станков. Количество вариантов скоростей, обеспечиваемых механизмом, равно количеству колёс в комплекте, если все колёса разные, или на единицу меньше при наличии в комплекте двух одинаковых колёс.
Если обозначить сменные колёса механизма а (на I валу – ведущем) и б (на II валу), а колёса в прилагаемом к станку комплекте имеют числа зубьев Z1 , …, Zn, то передаточное отношение механизма
|
|
|
|
|
|
i = |
a |
, |
|
|
|
|
|
|
|
|
|||
где а: Z1, |
Z2, |
… , Zn-1, |
Zn , |
б |
|||||
|
|
||||||||
б: Zn, |
Zn-1, … , Z2, |
Z1 . |
|
|
|||||
Поскольку межосевое расстояние А в передаче с модулем зацепле- |
|||||||||
ния m равно A = r |
+ r |
= |
m a |
+ |
m б |
, где rа, rб – радиусы делительных ок- |
|||
|
|
||||||||
|
а |
б |
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||
ружностей колёс, и, значит, a+б = 2A/m = сonst, то при подборе колёс для обеспечения требуемого i должно всегда выдерживаться условие
Z1+Zn = Z2+Zn-1 = ... = a+б = сonst.
68
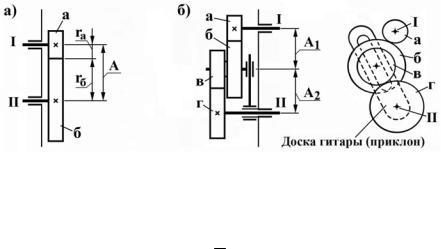
2. Гитары сменных шестерён или двухпарные гитары применяются обычно в приводах подач при необходимости обеспечения регулирования в широком диапазоне, с большим количеством вариантов и для обеспечения точного передаточного отношения.
В гитаре имеется (рис. 2.9,б) две пары шестерён. При этом первая шестерня (а) и последняя (г) располагаются соответственно на ведущем (I) и ведомом (II) валах, а две промежуточные (б, в) – на отдельной оси. Эта ось закрепляется в пазу приклона (доски гитары) в положении, нужном для обеспечения зацепления колёс в и г, а приклон закрепляется в угловом положении, при котором обеспечивается зацепление колёс а и б.
Рис. 2.9. Сменные зубчатые колёса:
а – парносменные колёса; б – гитара сменных шестерён
Передаточное отношение механизма: i = ба вг .
От размеров колёс б и в зависит, окажется ли возможным сцепить колёса гитары или нет. В этой связи принимают:
A1 =ra +rб ≥rв +(7,5...12) m, откуда m a/2+m б/2≥m в/2+(7,5...12) m и
а+б ≥ в+(15…24) |
(2.1) |
Аналогично: A2 =rв +rг ≥rб +(7,5 ...12) m |
и |
в+г ≥ б+(15…24) |
(2.2) |
Выражения (2.1) и (2.2) называют условиями сцепляемости.
Подобранные сменные колёса всегда следует проверять по условиям сцепляемости.
3. Наборы сменных колёс могут быть пятковыми, чётными и уни-
версальными. В первых двух числа зубьев кратны соответственно 5 и 4.
Пример пяткового набора: 20, 25, 30, 35, ..., 120, чётного: 20, 24, 28, 32, … .
В наборы может включаться колесо 127 для обеспечения работ в дюймовой системе измерений.
69
Имеется значительное количество способов подбора сменных шестерён гитары. Рассмотрим суть одного из них – способа подбора с разложением передаточного отношения на множители.
Пример. Пусть требуется подобрать из пяткового набора шестерён 20, 25, 30, 35,..., 120, четыре колеса, обеспечивающие передаточное отношение i = ба вг = 13 .
Представим передаточное отношение в виде двух дробей, разложив числитель и знаменатель на множители: i = 13 = 1030 = 23 105 . Затем умножим
числитель и знаменатель каждой дроби на какое-либо число, чтобы в результате получить числа из набора шестерён: i = 23 1515 105 44 = 3045 2040 .
Проверим результат подбора по условиям сцепляемости, приняв из скобок условий (2.1) и (2.2) число 20:
30+45>20+20 (первое условие выдерживается), 20+40<45+20 (второе условие не выдерживается).
Если условия сцепляемости (одно или оба) не выдерживаются, то можно переставить местами числитель с числителем или знаменатель со знаменателем, или дроби.
Переставим в примере знаменатели: i = 3040 2045 . Тогда получится:
30+40>20+20 и 20+45>40+20, т.е. условия сцепляемости при таком подборе выдерживаются.
Из рассмотренного понятно, что гитары сменных шестерён – это более сложные и менее жёсткие и мощные механизмы, чем парносменные колёса. Однако гитары позволяют обеспечить очень большое количество точных передаточных отношений, что абсолютно необходимо в кинематических цепях типа делительных. В приводах главного движения и подач должны передаваться значительные мощности, а количество возможных передаточных отношений должно быть сравнительно большим. При этом особой точности в обеспечении передаточного отношения не требуется. В таких случаях возможно применение механизмов с двумя парами сменных колёс, отличающихся от гитар по рис. 2.9,б тем, что приклон в них отсутствует, ось (или вал) колёс б и в своего положения менять не может, и межосевые расстояния А1 и А2 не изменяются. Поскольку такой механизм по существу – это совокупность двух парносменных передач, то и условия подбора колёс каждой пары такие же, как для однопарной гитары.
70

2.2.5. Механические вариаторы скоростей
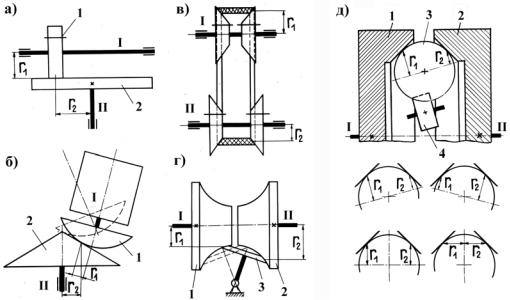
Непрерывное и плавное изменение в определённом диапазоне скоростей движения рабочих органов обеспечивается приводами с бесступенчатым регулированием. При бесступенчатом регулировании возможно обеспечение экономических режимов резания и сокращение машинного времени на обработку. Кроме того, уменьшается время на холостые ходы, поскольку регулирование скорости производится на ходу станка. Различают электрические, гидравлические и механические приводы бесступенчатого регулирования. В последних применяются фрикционные механизмы плавного регулирования или, иначе, механические вариаторы скоростей.
Вариаторы характеризуются безвибрационностью работы. Однако их широкое применение сдерживается из-за недостатков механизмов: невысокого КПД одних, сложности конструкции других и т.д.
Некоторые из фрикционных вариаторов показаны на рис. 2.10:
- во фрикционно-лобовом вариаторе или лобовой передаче (см. рис. 2.10,а) ведущим элементом может являться ролик 1, имеющий возможность осевого перемещения по валу I, вращающемуся с постоянной скоростью, ведомым – диск 2, закреплённый на валу II, скорость вращения которого должна варьироваться. Передаточное отношение механизма
i = r1 ηp , r2
где r1 и r2 – радиусы средней точки линии контакта ролика и диска, при этом r1 – постоянный (r1 = const), а r2 – изменяемый (r2 = var); ηр ≈ 0,98 –
коэффициент, учитывающий проскальзывание в передаче.
При переходе ролика через ось диска направление вращения последнего меняется.
Детали передачи изготавливаются: ролик – из чугуна или стали с обкладкой из кожи, пластмассы или текстолита; диск – из чугуна или стали.
Достоинства вариатора: простота конструкции и низкая стоимость. Недостатки: увеличенное проскальзывание из-за различных скоро-
стей точек по линии контакта, принадлежащих ролику и диску, в связи с чем
– сильное срабатывание роликов при большой их ширине и неспособность механизма передавать большие моменты при малой ширине роликов; малый КПД;
- в вариаторе с коническим диском или сфероконическом (см. рис. 2.10,б) движение коническому диску 2 передаётся установленным на валу электродвигателя диском 1, имеющим форму сферического сегмента.
71
Передаточное отношение механизма |
i = |
r1 |
ηp (r1 = var, r2 = var) из- |
|
r2 |
||||
|
|
|
меняется при повороте корпуса двигателя и соответствующем изменении положения оси вала I.
При изменении знака угла наклона оси вала I относительно нормали к рабочей поверхности диска 2 направление вращения последнего меняется.
Диски механизма изготавливаются: ведущий – из стали или чугуна; ведомый – из текстолита.
Вариатор является маломощным, поскольку площадь контакта фрикционных тел мала (теоретически – точка);
Рис. 2.10. Механические вариаторы скоростей:
а – фрикционно-лобовой вариатор (лобовая передача): 1 – ролик; 2 – диск; б – вариатор с коническим диском (сфероконический вариатор): 1 и 2 – ведущий и ведомый диски; в – вариатор с раздвижными конусами; г – вариатор Светозарова (торовый вариатор): 1 и 2 – ведущая и ведомая чашки; 3 – промежуточные ролики; д – шариковый вариатор:
1 и 2 – ведущая и ведомая чашки; 3 – промежуточные шарики; 4 – направляющие ролики
- в вариаторе с раздвижными конусами (см. рис. 2.10,в) имеются две пары раздвижных конических дисков (конусов), образующих попарно ведущий и ведомый шкивы. Движение с одной пары конусов на другую может передаваться стандартным или специальным клиновым ремнём, специальной цепью или стальным кольцом. Изменение скорости достигается путём
72
одновременного раздвигания одной и сближения другой пары конусов. При этом изменяются радиусы средней точки линий контакта ведущей и ведомой пар конусов с ремнём (цепью, кольцом), а, следовательно, и передаточное отношение. Оно равно:
i = |
r1 |
ηp , r1 = var, r2 = var. |
|
r2 |
|||
|
|
Примечание. Пары конусов передают движение с одной на другую не непосредственно, а через промежуточное звено (например, ремень). Поэтому передаточное отношение есть произведение двух дробей, в которых знаменатель первой и числитель второй – один и тот же параметр, относящийся к промежуточному звену. Приведённое выражение для i – результат упрощения изначального выражения.
Материал конусов: сталь, чугун, текстолит.
Максимальная окружная скорость, допускаемая передачей – до 1518 м/с; КПД – в пределах 0,8-0,9. Наибольшая передаваемая мощность – от 2,5 кВт (для вариаторов со стандартными клиновыми ремнями) до 25 кВт (для цепных вариаторов). Вариаторы со стальным закалённым кольцом могут передавать мощность до 7 кВт. Вариаторы со специальным клиновым ремнем имеют достаточно большой диапазон регулирования.
Вариаторы нетребовательны к уходу; их недостатки – значительные габариты и падение мощности с уменьшением скорости;
- в вариаторе Светозарова или торовом (см. рис. 2.10,г) имеются ведущая и ведомая чашки 1 и 2 и три промежуточных ролика 3. Контактные поверхности этих тел в сечениях по оси представляют собой дуги окружности. При изменении положения роликов изменяются рабочие диаметры ведущей и ведомой чашек (или: радиусы средней точки линий контакта чашек с промежуточными роликами) и передаточное отношение, которое определяется также, как для предыдущего механизма.
Чашки вариатора изготавливаются из закалённой стали ШХ15, промежуточные ролики – из такой же стали или из текстолита.
Передаваемая мощность 1,7-20 кВт и более; КПД – в пределах
0,92-0,98.
Достоинства: надёжность в работе; износостойкость (т.к. мало относительное скольжение на контактных поверхностях роликов и чашек); простота управления; высокий КПД; бесшумность; автоматическое прижатие рабочих элементов; технологичность фрикционных поверхностей;
- в шариковом вариаторе (см. рис. 2.10,д) имеются ведущая 1 и ведомая 2 чашки с внутренними коническими контактными поверхностями и
73
четыре промежуточных шарика 3, прижимаемых к контактным поверхностям направляющими роликами 4. Оси вращения шарика и направляющего ролика всегда параллельны. Для изменения радиусов окружностей контакта шариков с ведущей и ведомой чашками, а значит и передаточного отношения, необходим поворот осей вращения шариков. Он осуществляется при повороте осей направляющих роликов. Для этого ролики устанавливаются внутри кольцевых червячных колёс, сопрягаемых с червяком, приводной вал которого расположен по оси чашек.
Поскольку передаточное отношение этого механизма определяется радиусами окружностей контакта шариков, являющихся промежуточными звеньями, с ведущей и ведомой чашками, а не радиусами точек контакта этих чашек, то
i = |
r2 |
ηp , r1 = var, r2 = var. |
|
r1 |
|||
|
|
Шариковые вариаторы допускают изменение передаточного отношения в большом диапазоне, обеспечивая одинаково значительные ускорение (r1>r2) и замедление (r1<r2) скоростей, их равенство (r1 ≈r2).
Вращение валов I и II может происходить как в одном направлении (при расположении оси вращения шариков под углом к оси вращения чашек от 0º примерно до ±40º), так и в разных (когда этот угол от примерно 50
до 90º).
Материал чашек, шариков и роликов – закалённая сталь ШХ15. Вариаторы работают в масле и потому весьма долговечны. Их КПД
находится в пределах 0,8-0,85.
2.2.6. Реверсивные механизмы
Реверсивные механизмы (иначе – трензели) применяются для изменения направления движения рабочих органов станков. Для этой цели используются цилиндрические и конические трензели, а также могут применяться некоторые другие механизмы (шариковые вариаторы, планетарные механизмы и др.), основным назначением которых является что-либо иное. Некоторые конструкции трензелей показаны на рис. 2.11:
- в цилиндрическом трензеле с двумя паразитными колёсами (см.
рис. 2.11,а) колесо Z1 установлено на ведущем валу I, вращающемся в одном направлении, Z4 – на ведомом валу II, направление вращения которого должно меняться. Паразитные колёса Z2 и Z3 находятся на осях поворотной (относительно вала II) косынки, при установке которой в одно или другое крайнее положение обеспечивается переключение механизма и реверс движения вала II. Так, при установе косынки в левое положение оказываются
74
последовательно сцепленными колёса Z1, Z2, Z3, Z4, и будет обеспечиваться
|
|
Z1 |
|
|
|
Z2 |
|
|
|
Z3 |
|
|
Z1 |
|
|
передаточное отношение i'= |
− |
|
|
− |
|
|
− |
|
= − |
. Валы I и II бу- |
|||||
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Z4 |
|
|
|
|
Z2 |
|
|
Z3 |
|
|
Z4 |
|
|
|||||
дут вращаться в разных направлениях.
При установе косынки в правое положение оказываются сцепленными колёса Z1, Z3, Z4 и обеспечивается передаточное отношение
|
|
Z1 |
|
|
|
Z3 |
|
|
Z1 |
. Вал II будет вращаться в том же направлении, что и |
i"= |
− |
|
|
− |
|
= |
||||
|
|
|
|
|
|
Z4 |
|
|
Z4 |
|
|
|
Z3 |
|
|
|
|
|
|||
вал I.
Примечание. Передаточные отношения отрицательными не бывают. Знак "–" в выражениях (здесь и далее в параграфе) поставлен условно с целью показать, что валы зубчатой передачи наружного зацепления вращаются в разные стороны.
Рис. 2.11. Реверсивные механизмы:
а, б, в, г – цилиндрические трензели: с накидными шестернями (а), с муфтой (б), с передвижным блоком шестерён (в), с передвижной шестерней (г); д, е – конические трензели; ж – реверсивный зубчатый механизм для преобразования вращательного движения
в возвратно-вращательное
Конструкция трензеля такова, что абсолютная величина передаточного отношения при реверсе не меняется, а, значит, скорости прямого и об-
75
ратного ходов узла, в приводе которого установлен такой трензель, будут одинаковыми. Механизмы имеют малую длину вдоль осей; встречаются в приводах подач настольных токарных станков.
В современных станках такие механизмы не находят применения вследствие ряда недостатков (консольное крепление колёс, трудность осуществления смазки, тенденция паразитных колес либо расклинить ведущее и ведомое колёса, либо выйти из зацепления и т.д.).
Примечание. Механизм весьма ценен в познавательном плане. Так, анализ конструкции трензеля позволяет сделать заключение: при нечёт-
ном числе валов в кинематической цепи и передающих движение цилиндрических колёс наружного зацепления валы I и II будут вращаться в од-
ном направлении, при чётном – в противоположных. Этим правилом можно воспользоваться и в других случаях. Но всегда надо быть внимательным: правило по части числа колёс справедливо для цепей, где промежуточные колёса – паразитные. Если же на одном промежуточном валу или на каждом имеется по два колеса – на одно передаётся движение с предшествующего вала, а с другого передаётся движение на следующий вал, то эти два колеса при подсчёте следует принимать за одно, что неудобно, лучше считать число валов;
- в цилиндрическом трензеле с муфтой (см. рис. 2.11,б) движение с вала I на вал II передаётся либо двумя колёсами (1-м и 2-м, если муфта включена вправо), либо тремя (3, 4 и 5, муфта влево). При этом обеспечи-
ваются передаточные отношения i' = − |
Z1 |
или |
|
|
Z3 |
|
|
Z4 |
|
|
Z3 |
. |
|
i"= |
− |
|
− |
|
= |
||||||||
|
|||||||||||||
|
Z2 |
|
|
|
|
|
|
|
|
|
Z5 |
||
|
|
|
|
Z4 |
|
Z5 |
|
||||||
Впервом случае валы имеют разные направления вращения, во втором – одинаковые. Передаточные отношения в общем случае по абсолютной величине не совпадают. Поскольку соответствующие колёса постоянно сцеплены, колесо вала I, соединённое с ним муфтой, передаёт крутящий момент, а колесо, не соединённое с валом, вращается вхолостую.
Механизмы с кулачковыми (см. рис. 2.11,б) и зубчатыми муфтами часто применяются в приводах подач станков. В быстроходных механизмах холостые колеса и сцепные муфты следует располагать на реверсируемом валу, поскольку моменты инерции муфт меньше, чем зубчатых колёс, с которыми они сцепляются.
Вшпиндельных бабках станков, где требуется частое реверсирование, применяют механизмы с фрикционными муфтами. Т.к. моменты инерции фрикционных муфт много больше моментов инерции зубчатых колёс, то муфты следует располагать на ведущем валу;
76

-цилиндрический трензель с передвижным блоком шестерён (см.
рис. 2.11,в) аналогичен по составу передач предыдущему реверсивному механизму, а по принципу действия – группе передач на две скорости (см.
рис. 2.2,а);
-цилиндрический трензель с передвижным колесом (см. рис. 2.11,г)
имеет не пять колёс, как два предыдущих механизма, а четыре. Передвиж-
ное колесо Z1 может быть сцеплено либо с колесом Z2, либо Z3. Это возможно, если Z2=Z4, а ось шестерни Z3 лежит, естественно, не в плоскости валов I и II. Паразитная шестерня Z3 выполнена широкой с тем, чтобы колёса Z1 и Z4 при одновременном сцеплении с ней не оказались в одной плоскости и не сцепились друг с другом. Трензель обеспечивает равные по величине передаточные отношения:
|
Z1 |
|
|
|
Z1 |
|
|
|
Z3 |
|
|
Z1 |
|
|
i'= − |
; |
|
− |
|
|
− |
|
= |
; |
|||||
|
|
|
|
|||||||||||
Z2 |
i"= |
|
|
|
|
|
Z4 |
|||||||
|
|
|
|
Z3 |
|
|
Z4 |
|
|
|||||
- конические трензели могут быть выполнены с муфтой (см. рис. 2.11,д) либо с передвижным блоком шестерён (см. рис. 2.11,е). Два зубча-
тых колеса Z1и Z2, находясь в зацеплении с колесом Z3, вращаются в противоположных направлениях. Реверсирование производят переключением муфты М (д) или перемещением блока колес Z1-Z2 (е).
Передаточные отношения в любом варианте конструкции
i'= − Z1 ; i"= Z2 . Z3 Z3
Первый вариант трензеля конструктивно сложнее, второй вариант требует более сложного и мощного механизма переключения, поскольку необходимо обеспечивать точность и неизменность положения передвижного блока. В нём усилие, действующее вдоль оси включенной подвижной шестерни, воспринимается фиксатором механизма переключения, что снижает жёсткость передачи, поэтому данная схема используется сравнительно редко. Механизм с кулачковой муфтой обладает большей жёсткостью и применяется чаще;
- на рис. 2.11,ж показан реверсивный зубчатый механизм для преобразования вращательного движения в возвратно-вращательное. Ведущим звеном является колесо Z1, ведомым – диск с составным колесом, имеющим два концентричных зубчатых сектора Z2 и Z4 (один – внутреннего, другой – наружного зацепления), соединенных по концам зубчатыми секторами Z3. Ось колеса Z1 при зацеплении с различными секторами меняет свое расположение, что производится при помощи копировального механизма. Во время работы направление (и частота) вращения ведомого колеса меняются в зависимости от того, с каким сектором сцеплено ведущее колесо.
77
2.2.7. Механизмы прерывистого движения
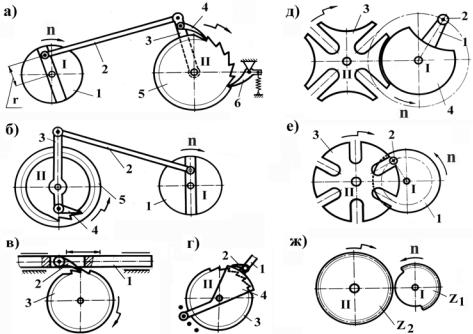
Для осуществления периодических движений рабочих органов в станках применяются механические, гидравлические, пневматические, электрические и различные комбинированные устройства. К механическим относятся храповые и мальтийские механизмы, неполнозубые передачи, кулачковые механизмы и другие устройства.
В механизмах, схемы которых показаны на рис. 2.12, ведущий вал I совершает непрерывное вращательное движение, а ведомый II – прерывистое, т.е. периодически поворачивается на угол, равный 2π·i, где i – передаточное отношение механизма.
1. В храповых механизмах (см. рис. 2.12,а,б) непрерывно вращающийся с ведущим валом кривошип (кривошипный диск) 1 через шатун 2 сообщает возвратно-качательное движение коромыслу 3 с собачкой (защёлкой) 4. Собачка при своём движении в одном направлении прощёлкивает по зубьям храповика (храпового колеса) 5, закреплённого на ведомом валу, а в другом, упираясь (будучи подпружиненной) в зуб храповика, обеспечивает его поворот вместе с коромыслом. Чтобы храповик произвольно не поворачивался при возврате собачки, предусматривают фиксатор 6.
Храповик может иметь наружные (см. рис. 2.12,а), внутренние (см. рис. 2.12,б) или торцевые зубья.
Направление поворота ведомого вала постоянно и не зависит от направления вращения ведущего вала.
Собачка может приводиться и иным образом, например, она может находиться на штанге 1 (см. рис. 2.12,в), перемещающейся возвратнопоступательно.
Передаточное отношение механизма i = Za ,
где Z – число зубьев на храповике; а – число зубьев храповика, захватываемых собачкой за один её ход.
Регулирование число зубьев, захватываемых собачкой, а значит, величины периодического перемещения, производимого посредством храпового механизма, может производиться:
-изменением угла качания коромысла с собачкой, что достигается
изменением радиуса кривошипа (см. рис. 2.12,а,б) или коромысла;
-изменением длины хода штанги с собачкой (см. рис. 2.12,в);
-перекрытием с помощью специального щитка 4 (см. рис. 2.12,г)
зубьев храповика на части дуги, описываемой собачкой, или автоматиче-
ским подъёмом собачки на части этой дуги.
78
Если механизм должен обеспечивать реверс ведомого вала, то храповик выполняют с зубьями симметричной формы, а собачку делают перекидной или поворотной.
С помощью храповых механизмов обеспечивают весьма не большие передаточные отношения. Обычно храповики выполняются с числом зубьев 20-200, а захватывается на них при работе механизма от одного до 5-6 зубьев. Поворот храповика за один ход собачки в большинстве случаев не превышает 45º.
Рис. 2.12. Механизмы прерывистого движения:
а, б – храповые механизмы: 1 – кривошип (кривошипный диск); 2 – шатун; 3 – коромысло; 4 – собачка; 5 – храповик; 6 – фиксатор; в – храповой механизм с собачкой 2 на штанге 3; г – храповой механизм с регулированием числа захватываемых собачкой 2 зубьев посредством щитка 4; д, е – мальтийские механизмы: 1 – водило;
2 – палец водила; 3 – ведомый диск с радиальными пазами; 4 – фиксатор; ж – механизм с зубчатыми колесом и сектором (неполнозубая передача)
Храповые механизмы часто применяются для обеспечения прямолинейной периодической подачи рабочих органов строгальных, долбёжных, шлифовальных и других станков. Для этого храповик кинематически связывают с ходовым винтом, который осуществляет требуемое прямолинейное перемещение гайки, установленной в рабочем органе (столе, суппорте, салазках и т.п.).
79

2. Мальтийские механизмы предназначены для поворотов ведущего вала на большие углы, например, 60, 90 или 180º. Их обычно используют для периодических поворотов шпиндельных блоков токарных автоматов и полуавтоматов, револьверных головок в токарно-револьверных станках и автоматах, многопозиционных столов и т.д.
На ведущем валу механизма (см. рис. 2.12,д,е) закреплено водило 1, выполненное в виде рычага (д) или диска (е), с пальцем 2. Палец при повороте водила входит в одну из радиальных прорезей (пазов) диска ("мальтийского креста") 3, поворачивает его и выходит из прорези. Далее водило совершает холостую часть хода, а диск от самопроизвольного поворота фиксируется каким-либо устройством. Один из возможных вариантов такого устройства (см. рис. 2.12,д,) содержит закреплённый на оси водила фиксирующий диск с выемкой; мальтийский крест также имеет дуговые выемки. Поворот креста становится возможным, когда фиксирующий диск поворачивается к нему своей выемкой.
Передаточное отношение механизма i = Za ,
где а – число пальцев на водиле; Z – число прорезей на мальтийском кресте.
Мальтийские механизмы не допускают регулирования передаточного отношения. Оно "заложено" в конкретной конструкции. Однако если в кинематическую цепь между мальтийским механизмом и поворачиваемой частью станка ввести передачи и группы передач с изменяемым передаточным отношением, то можно регулировать угол поворота этой части при неизменном угле поворота креста. Т.е. в таком случае передаточное отношение цепи не совпадает с передаточным отношением мальтийского механизма и является изменяемым. Передачи в цепи с мальтийским механизмом могут быть и не регулируемыми. Такое решение применяется, если по какимлибо соображениям диск механизма не может быть закреплён на поворачиваемом узле или в приводе устанавливается мальтийский механизм с другим передаточным отношением, нежели требуемое для поворота узла.
Мальтийские механизмы бывают т.н. правильные и не правильные. У правильных механизмов крест имеет пазы с равномерным шагом; у не правильных углы между смежными пазами креста различные. В станках используются, в основном, правильные мальтийские механизмы с внешним зацеплением и радиальными пазами. Рассмотренные механизмы являются плоскими и располагаются на параллельных валах. Существуют сферические мальтийские механизмы, обеспечивающие передачу периодических
80