

3806 / 3806
.pdf
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3 |
||
Результаты расчета динамических характеристик поступательно |
|||||||||||||
|
|
движущегося груза и вращающегося маятника |
|
|
|||||||||
r |
m |
a |
|
Fн |
Р |
Е к |
Eп М н |
J J |
L |
Е к |
|||
|
|
|
|
|
|
|
|
|
пост |
|
|
|
вр |
м |
кг |
м |
с2 |
м |
с–2 |
с–1 |
Н |
кг м |
Дж |
Дж Н½м кг½м2кг½м2 кг м |
2 |
||
|
|
|
с |
|
|
|
с |
|
|
|
с |
Дж |
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
= |
= |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
m |
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
= |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
3.5.4. Используя формулы (14)–(17), рассчитайте момент си- |
||||||||||||
лы натяжения М н , момент инерции J , момент импульса L и ки- |
|||||||||||||
нетическую энергию Еврк |
вращающегося маятника. Результаты |
||||||||||||
расчетов внесите в табл. 3. |
|
|
|
|
|
|
|
||||||
|
3.5.5. |
Постройте график зависимости |
углового |
ускоре- |
|||||||||
ния |
|
от момента силы натяжения М н ( f М н ). |
|
|
|||||||||
|
3.6. Изучение зависимости углового ускорения от |
||||||||||||
момента инерции маятника |
|
|
|
|
|
||||||||
3.6.1.В табл. 4 перенесите значения b , и углового ускорения 
 из табл. 2.
из табл. 2.
3.6.2.Значения момента сил натяжения М н возьмите из табл. 3 для значений m2 и r2 .
3.6.3.По формуле (15) рассчитайте момент инерции маятника для различных положений цилиндрического груза на спицах,
взяв  а
а и
и 
 из табл. 2. Результаты расчета занесите в табл. 4.
из табл. 2. Результаты расчета занесите в табл. 4.

11
Таблица 4 Результаты расчета момента инерции маятника
с грузами на спицах
|
|
|
b |
|
|
М н |
J |
|
|
|
м |
м |
с–2 |
Н½м |
кг½м2 |
Без |
грузов |
на |
|
|
|
(из табл. 3) |
|
спицах |
|
|
|
|
|
|
|
С |
грузами |
на |
|
|
|
(ф. 15) |
|
|
|
|
(ф. 15) |
|
|||
спицах |
|
|
|
|
|
||
|
|
|
|
(ф. 15) |
|
||
|
|
|
|
|
|
|
|
3.6.4.Постройте график зависимости 
 f J .
f J .
3.6.5.Проанализируйте зависимость момента инерции маятника от его массы и от распределения массы относительно оси вращения.
3.6.6.Сделайте выводы о зависимости динамических характеристик от кинематических, о выполнимости основного уравнения динамики вращательного движения.
ЛАБОР АТОР НАЯ Р АБОТА № 2
Определение параметров движения твердых тел на основе законов сохранения
1.Цель работы: а) определение основных кинематических и динамических характеристик и проверка законов вращательного движения; б) определение момента инерции тела с применением законов сохранения момента импульса и механической энергии.
2.Подготовка к работе : прочитать в [2] ºº 4.2, 4.3, 5.2, 5.3, [1] ºº 16–19. Для выполнения лабораторной работы студент должен знать: а) основные кинематические и динамические характеристики вращательного движения; б) законы сохранения момента импульса и механической энергии; в) основное уравнение динамики вращательного движения твердого тела; г) уметь пользоваться измерительными приборами.
12
3.Выполнение работы
3.1.Описание экспериментальной установки
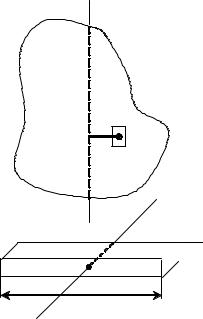
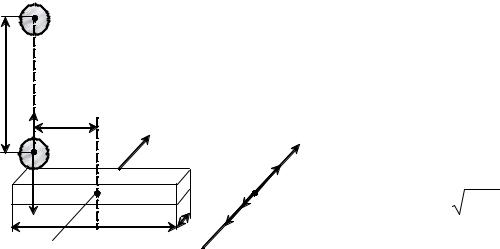
Стержень, момент инерции которого надо определить, укреплен на неподвижной горизонтальной оси, проходящей через центр масс стержня. Стальной шарик удерживается электромагнитом над одним из концов стержня на высоте h. При выключении электромагнита шарик, свободно падая с высоты h, приобретает скорость и упруго ударяется о горизонтально расположенный стержень в точке, отстоящей от оси вращения на расстоянии r (рис. 2). Место удара определяют по небольшой вмятине в тонком слое пластилина, предварительно нанесенном на стержень. Число оборотов N, которое сделает стержень до полной остановки, определяют по насаженному на ось картонному кругу, разделенному на 10 частей.
3.2. Методика измерений и расчета
Момент инерции тела, масса которого распределена по объему непрерывно, вычисляют путем интегрирования:
O
а)
dV
r
O O
б)


 2
2
O1
Рис. 1. К расчету момента инерции твердого тела относительно оси ОО
J dm r2 r 2dV ,
где dV – бесконечно малый объём массой dm (рис. 1, а); r – расстояние от объёма dV до оси вращения; – плотность вещества в том месте, где взят объём.
В случае однородного прямоугольного стержня для оси, проходящей через центр масс стержня перпендикулярно двум боковым граням, интегрирование даёт следующее выражение:
J |
т |
|
|
1 |
m |
2 |
2 |
, |
(1) |
|
|
||||||||
|
|
12 |
ст |
1 |
2 |
|
|
||
|
|
|
|
|
|
|
|
||
|
|
|
|
13 |
|
|
|
|
|
|
где mcт – масса стержня; 1 |
– |
длина стержня; |
2 – ширина |
|||||||
стержня (рис. 1, б). |
|
|
|
|
|
|
|
|
||
|
В данной работе для экспериментального определения мо- |
|||||||||
|
|
|
|
|
мента инерции стержня ис- |
|||||
|
|
|
|
|
пользуется |
взаимодействие |
||||
|
|
|
|
|
горизонтально расположен- |
|||||
h |
|
|
|
|
ного стержня с падающим с |
|||||
|
|
|
|
высоты |
h |
металлическим |
||||
|
|
|
|
|||||||
|
r |
|
|
|
шариком массой m (рис. 2). |
|||||
|
Z |
|
|
Z |
Перед |
ударом скорость |
|
|||
|
|
|
|
|
шарика равна |
|
|
|||
|
О |
|
|
|
|
|
|
|
||
|
L |
Lш |
|
|
2gh . |
(2) |
||||
|
|
|
ст |
|
|
|||||
|
|
2 |
|
|
|
|
|
|
|
|
|
1 |
Lш |
|
После удара, который |
||||||
|
а) |
|
б) |
|
рассматривается как абсо- |
|||||
Рис. 2. Схема экспериментальной |
лютно |
упругий, шарик |
от- |
|||||||
скакивает |
от |
стержня вер- |
||||||||
|
установки |
|
|
|||||||
|
|
|
тикально вверх со скоро- |
|||||||
стью |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||
, а стержень начинает вращаться с начальной угловой |
||||||||||
скоростью 0 .
Согласно основному закону динамики вращательного движения изменение момента импульса системы šшарик – стерженьŸ равно
L L |
L |
M |
внеш |
t . |
(3) |
2 |
1 |
|
ср |
|
|
Полагая, что система тел šшарик – стерженьŸ квазизамкнута, для неё выполняется закон сохранения момента импульса
|
(4) |
[r , m ] J 0 [r , m ]. |
|
или в проекции на ось OZ (см. рис. 2): |
|
|
(5) |
r m J 0 r m . |
Так как удар шарика о стержень – упругий, то выполняется закон сохранения механической энергии, согласно которому
m |
2 |
2 |
|
2 |
|
||
|
|
J 0 |
|
m |
, |
(6) |
|
2 |
|
|
|
||||
|
2 |
2 |
|
|
|||

|
|
14 |
|
где m 2 |
2 |
– кинетическая энергия шарика перед ударом; |
J 02 |
|
|
2 |
|
– кинетическая энергия вращающегося стержня после |
удара; |
||
m 2 2 – кинетическая энергия шарика после удара.
Решая совместно уравнения (5) и (6), получим выражение для момента инерции стержня:
J |
mr |
2 r . |
(7) |
|
|||
0 |
|
||
|
0 |
|
|
Начальную угловую скорость 0 вращения стержня можно определить, измеряя число оборотов N, которое он сделает за время t от начала вращения до полной остановки.
Угол поворота стержня 2 N . Для равнозамедленного вращательного движения 0 к t , конечная скорость кото-
|
2 |
|
|
|||
рого равна нулю. Поэтому |
0 |
t . Отсюда |
|
|||
2 |
|
|
||||
|
4 N |
|
|
|||
0 |
|
. |
(8) |
|||
|
||||||
|
|
|
t |
|
||
Вращение стержня после удара происходит в условиях действия на него единственного момента сил – момента сил трения в
оси М М тр . С учетом этого основное |
уравнение |
динамики |
||||
вращательного движения запишется в виде |
|
|
|
|
||
J M тр , |
|
0 |
|
(9) |
||
где – угловое ускорение стержня, равное |
. |
|
||||
|
|
|||||
Тогда момент сил трения в оси равен |
|
t |
|
|||
|
|
|
|
|||
M тр |
J 0 |
. |
|
|
|
(10) |
|
|
|
|
|||
|
t |
|
|
|
|
|
Зная момент сил трения, можно определить работу этих сил |
||||||
2 N |
|
|
|
|
||
Атр M тр d M тр |
2 N . |
(11) |
||||
0

15
3.3. Определение кинематических характеристик шарика и стержня
3.3.1.Установите стержень строго горизонтально. Измерьте расстояние h от магнита до точки удара шарика о стержень. Расстояние r от оси вращения до точки соударения со стержнем измерьте с помощью линейки. Предварительно нанесите на стержень тонкий слой пластилина для определения места удара.
3.3.2.По формуле (2) рассчитайте скорость шарика перед ударом о стержень.
3.3.3.Измерьте время t вращения и число оборотов N стержня после удара. Опыт повторите не менее 5 раз.
3.3.4.Найдите средние значения времени  t
t  и числа оборотов
и числа оборотов  N
N  и по формуле (8) рассчитайте начальную угловую ско-
и по формуле (8) рассчитайте начальную угловую ско-
рость 0 , а по формуле (9) угловое ускорение . Результаты измерений и расчетов занесите в табл. 1.
|
|
|
|
|
|
|
Таблица 1 |
||
Результаты измерения времени и числа оборотов стержня |
|||||||||
и расчета кинематических величин шарика и стержня |
|
||||||||
№ |
t |
t |
N |
N |
r |
|
0 |
|
|
п/п |
с |
с |
об |
об |
м |
м/с |
с–1 |
с–2 |
|
1 |
|||||||||
|
|
|
|
|
|
|
|
||
2 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
3.4. |
Определение |
динамических |
характеристик |
||||||
движения шарика и стержня |
|
|
|
|
|||||
3.4.1. По формуле (7) рассчитайте экспериментальное значение момента инерции Jэ стержня относительно неподвижной оси.
Значение массы шарика m приведено в паспорте установки.

16
3.4.2. Теоретическое значение момента инерции стержня Jт рассчитайте по формуле (1). Значение массы стержня mст приведено в паспорте установки. Линейные размеры стержня ℓ1 и ℓ2 измерьте с помощью линейки или штангенциркуля.
3.4.3. Сравните экспериментальное Jэ и теоретическое Jт значения момента инерции стержня и рассчитайте относительное расхождение между ними в процентах:
J т J э 100 % .
Jт
3.4.4.Момент импульса шарика Lш перед ударом относительно центра вращения рассчитайте по формуле Lш r m , а
момент импульса стержня Lст относительно неподвижной оси сразу после удара – по формуле Lст J 0 .
3.4.5. Определите кинетическую энергию Wкш шарика перед ударом и начальную кинетическую энергию Wкст стержня после удара.
3.4.6. Определите момент сил трения в оси вращения по формуле (10). Значение момента инерции стержня примите равным экспериментальному значению Jэ.
3.4.7.Рассчитайте работу сил трения в оси по формуле (11).
3.4.8.Результаты расчетов динамических величин шарика и стержня занесите в табл. 2.
Таблица 2 Расчет динамических величин шарика и стержня
Jэ |
Jт |
|
Lш |
Lст |
W ш |
W ст |
M тр |
Атр |
|
|
|
|
|
1 |
1 |
|
|
кг · |
кг · |
% |
кг · м2/с |
кг · м2/с |
Дж |
Дж |
Н · м |
Дж |
м2 |
м2 |
|||||||
|
|
|
|
|
|
|
|
|
17
3.4.9. Сделайте вывод о возможности применения законов сохранения момента импульса и механической энергии системы šшарик – стерженьŸ для определения момента инерции стержня.
ЛАБОР АТОР НАЯ Р АБОТА № 3
Определение кинематических и динамических характеристик маятника Максвелла
1. Цель работы: применение законов кинематики и динамики поступательного и вращательного движения для определения кинематических и динамических характеристик маятника Максвелла.
2. Подготовка к работе : прочитать в учебниках [1] ºº 4.1 – 4.3, 5.3, [2] ºº 4, 16–19. Для выполнения лабораторной работы студент должен знать: а) кинематические характеристики поступательного и вращательного движения твердого тела; б) основные уравнения динамики поступательного и вращательного движения; в) понятия момента силы и момента инерции тела; г) закон сохранения механической энергии.
3.Выполнение работы
3.1.Описание установки
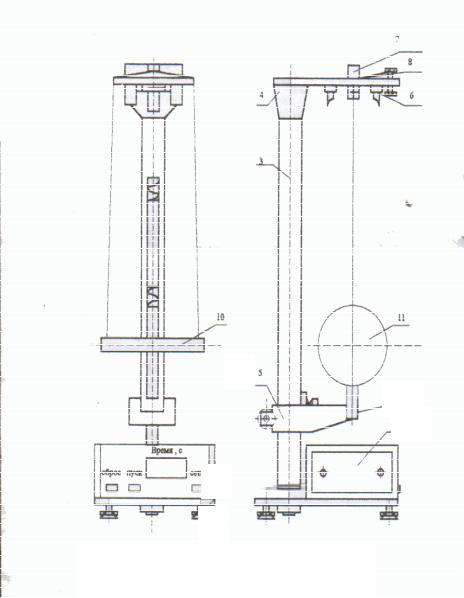
Общий вид установки FPM-03 приведён на рис. 1. Основание 1 оснащено регулируемыми ножками 2, позво-
ляющими произвести выравнивание прибора. В основании закреплена колонка 3, на которой крепятся два кронштейна: неподвижный верхний 4 и подвижный нижний 5. На верхнем кронштейне находятся электромагнит 6, фотоэлектрический датчик 7 и устройство (вороток) 8, для крепления и регулировки бифилярного подвеса маятника.
Нижний кронштейн, вместе с прикреплённым к нему фотодатчиком 9 можно перемещать вдоль колонки и фиксировать в любом положении в пределах шкалы колонки 0–420 мм.
18
Маятник Максвелла – это диск 10, закреплённый на оси, подвешенной на бифилярном подвесе. На диск крепится одно из трёх сменных колец 11, для изменения момента инерции маятника. Маятник с кольцом фиксируется в верхнем исходном положении с помощью электромагнита 6.
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
6 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
11 |
|
|
|
|
|
|
5
9
12
1
2
Рис. 1. Общий вид установки FPM-03
Миллисекундомер 12 с цифровой индикацией времени жестко закреплён на основании 1. При нажатии клавиши šСетьŸ загораются лампочки фотоэлектрических датчиков и высвечиваются нули на индикаторе. Клавиша šСбросŸ вызывает сброс всех схем миллисекундомера и подготовку его к измерению.
При нажатии клавиши šПускŸ электромагнит обесточивается и маятник, поднятый в верхнее положение, начинает раскру-
19
чиваться. Миллисекундомер производит отсчёт времени. В момент пересечения маятником оптической оси нижнего фотодатчика счёт времени прекращается.
3.2. Методика измерений и расчета
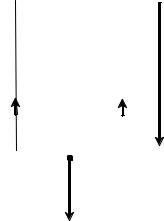
Маятник Максвелла участвует в двух движениях: поступательном движении центра масс и вращательном движении относительно оси, проходящей через центр масс.
3.2.1. Поступательное движение центра масс ма - ятника Максвелла
Поступательное движение центра масс маятника Максвелла происходит под действием силы тяжести mg и силы натяжения
нити Fн .
Согласно второму закону Ньютона |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ma mg 2Fн . |
|
|
|
|
|
|
|
|
В проекциях на ось у |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
ma mg 2Fн . |
масс |
|
|
(1) |
||||
|
|
|
|
|
|
Центр |
|
маятника, |
|||||
|
|
|
|
|
|
проходя расстояние h за вре- |
|||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
мя t , приобретает ускорение |
|||||||
|
|
|
|
|
|
a |
2h |
|
|
|
|
(2) |
|
|
|
|
|
2 |
|
|
|||||||
Fн |
|
|
Fн |
|
|
t |
скорость в |
||||||
|
|
|
|
и максимальную |
|||||||||
|
|
|
|
|
у |
конце движения |
|
|
|
||||
|
|
|
|
|
|
|
|
|
2h |
|
|
||
|
|
|
|
|
|
аt |
. |
(3) |
|||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
t |
|
|||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
mg |
Динамические |
характе- |
||||||||
|
|
|
|
|
|
||||||||
Рис. 2. Схема сил, действующих |
ристики |
поступательного |
|||||||||||
на маятник Максвелла |
движения центра масс маят- |
||||||||||||
мулам: |
|
|
|
|
ника рассчитываются по фор- |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
а) сила натяжения |
|
|
|
|
|
|
|
|
|||||