

13.5. Геометрическая интерпретация пуансо
Представление о движении вектора угловой
скорости твердого тела в случае Эйлера
может быть сделано наглядным, если
учесть, что в этом случае вектор
кинетического момента
![]() сохраняется Сохранение направления
вектора в пространстве фиксирует
плоскость движения Выберем систему
координат некоторой инерциальной
системы отсчета так, чтобы орт
сохраняется Сохранение направления
вектора в пространстве фиксирует
плоскость движения Выберем систему
координат некоторой инерциальной
системы отсчета так, чтобы орт![]() был направлен вдоль вектора
был направлен вдоль вектора![]()
![]() .
.
Проекции вектора
![]() на орты
на орты
![]() системы, связанной с твердым телом,
изменяются
системы, связанной с твердым телом,
изменяются
![]() .Учитывая, что компоненты этого вектора
выражаются через компоненты вектора
угловой скорости
.Учитывая, что компоненты этого вектора
выражаются через компоненты вектора
угловой скорости
![]() :
:
![]() ,
,
вычислим скалярное произведение
.![]() .
.
Поскольку энергия в рассматриваемом
случае является интегралом, то полученное
соотношение означает, что сохраняется
проекция вектора угловой скорости на
ось
![]()
![]() .
.
Таким образом, концы вектора угловой
скорости при движении будут лежать в
некоторой плоскости
![]() ,
перпендикулярной вектору кинетического
момента, а в нашем случае — оси
,
перпендикулярной вектору кинетического
момента, а в нашем случае — оси
![]() С другой стороны, сохранение кинетической
энергии приводит к тому, что величина
вектора
С другой стороны, сохранение кинетической
энергии приводит к тому, что величина
вектора![]() меняется, так как геометрическое
место концов вектора определяет эллипсоид
инерции
меняется, так как геометрическое
место концов вектора определяет эллипсоид
инерции
![]() .
.
Таким образом, движение вектора угловой
скорости при вращении твердого тела
происходит так, как будто эллипсоид
инерции «катится» без проскальзывания
по плоскости
![]() .
.
Совместное выполнение условий движения эллипсоида инерции по плоскости

определяет кривые - точки касания
плоскости
![]() и эллипсоида инерции. В координатах,
связанных с твердым телом, где тензор
инерции диагонален (орты
и эллипсоида инерции. В координатах,
связанных с твердым телом, где тензор
инерции диагонален (орты![]() ),
эти уравнения определяют поверхности
сферы
),
эти уравнения определяют поверхности
сферы![]() и эллипсоида инерции
и эллипсоида инерции![]() :
:

Пересечение этих поверхностей определяет
геометрическое место точек полюсов
вектора угловой скорости — полодии.
Вводя константы
![]() вместо
вместо![]() и
и![]() с
помощью соотношений
с
помощью соотношений
![]() ,
,![]() ,
,
нетрудно показать, что на плоскостях
![]() и
и![]() проекции линий пересечения образуют
семейство эллипсов:
проекции линий пересечения образуют
семейство эллипсов:
 ,
,
а проекция на плоскость
![]() определяет семейство гипербол:
определяет семейство гипербол:
 .
.
13.6. Твердое тело во внешнем поле. Случай лагранжа
В случае твердого тела, движущегося в
заданном внешнем поле, переменные
разделяются, и решение может быть
получено в виде квадратур только в
некоторых специальных случаях В
случае Лагранжа движение происходит в
однородном поле тяжести и предполагается,
что вращающееся тело обладает симметрией,
так что
![]() .Предположим, что в этом случае орты
.Предположим, что в этом случае орты![]() ,
выбраны так, чтобы они совпадали с
главными осями тензора инерции, а
лабораторная система ориентирована
так, что сила тяжести направлена вдоль
оси
,
выбраны так, чтобы они совпадали с
главными осями тензора инерции, а
лабораторная система ориентирована
так, что сила тяжести направлена вдоль
оси![]() Мы будем предполагать, что твердое тело
имеет неподвижную точку, которая
находится на расстоянии
Мы будем предполагать, что твердое тело
имеет неподвижную точку, которая
находится на расстоянии![]() от центра масс, и выберем начало
лабораторной системыО,совпадающим
с неподвижной точкой. Положение твердого
тела относительно инерциальной
лабораторной системы
от центра масс, и выберем начало
лабораторной системыО,совпадающим
с неподвижной точкой. Положение твердого
тела относительно инерциальной
лабораторной системы![]() мы будем задавать углами Эйлера, как
показано на рис 1 13
мы будем задавать углами Эйлера, как
показано на рис 1 13
Для составления уравнений движения твердого тела в этих переменных может быть использован лагранжев подход. Кинетическую энергию вращающегося тела удобно вычислять, используя теорему Кенига. В этом случае функция Лагранжа легко вычисляется:
.![]() .
.
Поскольку функция Лагранжа не зависит
явно от углов прецессии
![]() и собственного вращения
и собственного вращения![]() ,в системе сохраняются соответствующие
обобщенные импульсы:
,в системе сохраняются соответствующие
обобщенные импульсы:
![]()
![]() .
.
Кроме того, функция Лагранжа не зависит явно от времени, что приводит к сохранению обобщенной энергии, которая в данном случае совпадает с полной:
![]() (41.13)
(41.13)
Поскольку число первых интегралов задачи равно числу независимых координат, возможно провести разделение переменных и получить решение в виде квадратур. Подставляя выражения для обобщенных скоростей в интеграл энергии (41.13), мы приходим к уравнению с разделяющимися переменными
![]() , (42.13)
, (42.13)
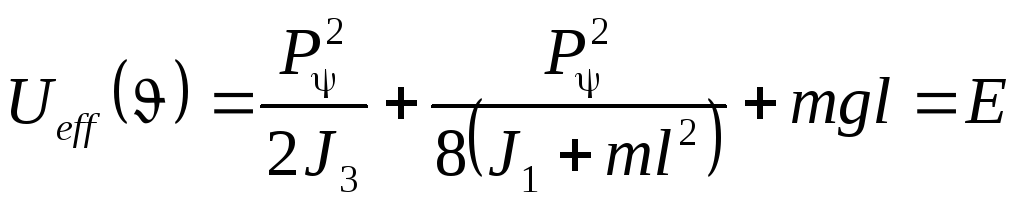
где
![]() —эффективная энергия, определяемая
выражением
—эффективная энергия, определяемая
выражением
 .
.
Решение уравнения (42.13) в виде квадратуры получается элементарно:
 .
.
Область возможных значений угла нутации
![]() определяется условием
определяется условием![]() .
При
.
При
![]() функция
функция![]() обращается в бесконечность при
обращается в бесконечность при![]() ,
а в интервале между этими значениями
имеет минимум. Таким образом, при любых
,
а в интервале между этими значениями
имеет минимум. Таким образом, при любых![]() движение происходит в области
движение происходит в области
![]() ,где
,где
![]() определяется условием
определяется условием![]() .
.
В общем случае решение уравнения (42 13) будет весьма громоздким, однако в некоторых частных случаях решение может быть получено в элементарных функциях. В частности, тело может вращаться вокруг вертикальной оси Найдем условия, при которых это вращение существует и устойчиво.
Пусть
![]() .При этом орты
.При этом орты![]() и
и![]() совпадают, так что
совпадают, так что![]() .
Поскольку
.
Поскольку![]() ,
,
 . (43.13)
. (43.13)
В окрестности точки покоя
![]() эффективная потенциальная энергия
может быть разложена в ряд по
эффективная потенциальная энергия
может быть разложена в ряд по![]() :
:
 .
.
Функция имеет минимум при
![]() в случае
в случае
![]() , (44.13)
, (44.13)
поэтому при выполнении условия (44.13) движение тела вокруг вертикальной оси устойчиво.
Другой случай — псевдорегулярная
прецессия при
![]() осуществляется также при достаточно
большой скорости вращения тела вокруг
оси симметрии Пусть параметры задачи
выбраны так, что
осуществляется также при достаточно
большой скорости вращения тела вокруг
оси симметрии Пусть параметры задачи
выбраны так, что![]() ,
а
,
а![]() .
В этом случае интегралы движения
выражаются через заданные значения
углов и угловых скоростей:
.
В этом случае интегралы движения
выражаются через заданные значения
углов и угловых скоростей:
![]() ,
,![]() .
.
Эффективная энергия для заданных условий имеет вид
 (45.13)
(45.13)
Значение полной энергии, при котором
![]() ,
,
![]() .
.
Для исследования движения вблизи точки
![]() разложим
разложим![]() по степеням
по степеням![]() ,
ограничиваясь степенями
,
ограничиваясь степенями![]() не выше второй Интеграл энергии имеет
вид
не выше второй Интеграл энергии имеет
вид

Дифференцируя это уравнение по времени, получим линейное уравнение для отклонения от точки покоя:
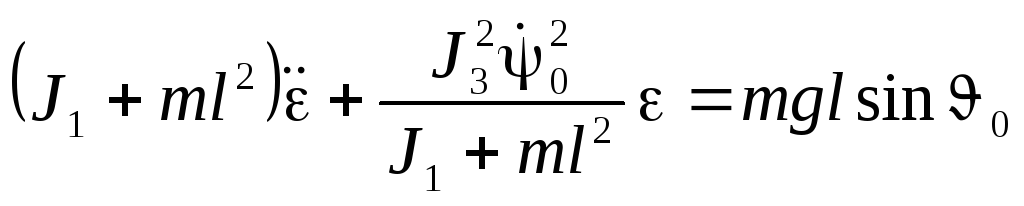 .
.
Решение этого уравнения при начальных
условиях
![]() ,
,![]() имеет вид
имеет вид
 ,
где
,
где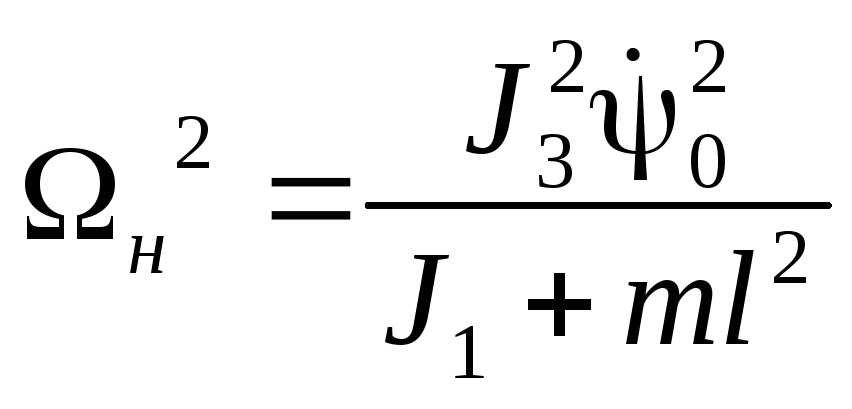 .
.
Учитывая полученное выражение, нетрудно получить зависимость углов Эйлера от времени, используя интегралы задачи
 ,
,
 ,
,
 . (46.13)
. (46.13)
Движение можно рассматривать как
медленную прецессию вокруг вертикали.
Скорость прецессии тем меньше, чем
больше угловая скорость собственного
вращения. На это медленное движение
накладывается колебание с малой
амплитудой и высокой частотой
![]() .Одновременно происходят малые колебания
угла нутации
.Одновременно происходят малые колебания
угла нутации![]() с частотой
с частотой![]() .
.