

Встроенные электромеханические волновые моторредукторы
Последовательное формирование электромеханического модуля применением соединительных муфт и редукторов приводит к увеличению веса электропривода, так как габариты и вес редуктора и муфт соизмеримы с таковыми для двигателя или даже превосходят их. Размещение редуцирующей части, например, волновых зубчатой или резьбовой передач внутри ротора обычной асинхронной или синхронной машины является новым и перспективным решением в создании волнового электромеханического привода. При работе электродвигателя вместе с ротором вращается генератор волн, деформируя застопоренное гибкое колесо, в результате чего выходной вал, связанный с жестким колесом, приобретает медленное редуцируемое вращение.
Встроенная волновая передача в зависимости от ее конструктивного исполнения дает возможность получить как вращательный односкоростной или многоскоростной), так и поступательный электромеханический модуль. Кроме того, созданные комбинированные электроприводы с повышенными функциональными возможностями позволяют получить на выходе два независимых движения — линейное и вращательное.
Рассмотрим одну из разработанных конструкций таких электромеханических модулей (рис. 7. 7).
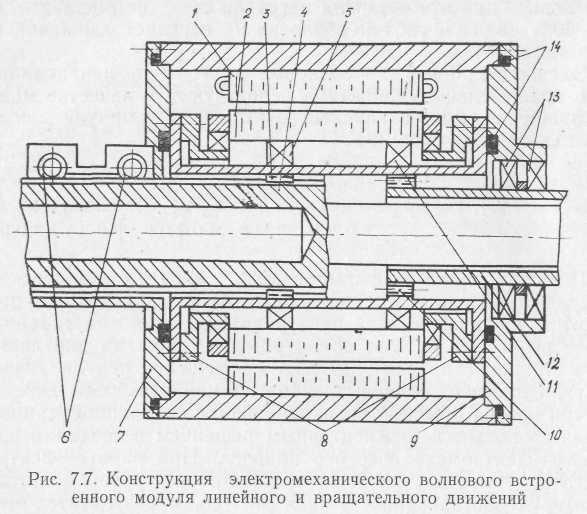
Электромеханический встроенный модуль линейного и вращательного движений состоит из общепромышленного электродвигателя переменного тока с неподвижным статором 1 и вращающимся ротором 2, гибкой резьбовой гайки 3, закрепленной на щите и связанной с винтом 4. Внутри полого ротора размещена волновая герметичная передача с кулачковым генератором волн 5 и роликовыми опорами 6, которая базируется на подшипниковом щите 7 с втулками ротора 8, вторым щитом 9 с установленным на нем гибким зубчатым колесом 10, деформируемым кулачковым генератором волн 11. Жесткое зубчатое колесо 12 волновой зубчатой передачи связано с выходным валом, опорами которого служат подшипники 13. В местах сопряжений предусмотрены уплотнения 14.
Модуль работает следующим образом. При включении электропитания в обмотку статора ротор начинает вращаться. Одновременно с ним вращаются кулачковые генераторы волн, которые деформируют гибкое колесо и обеспечивают движение соответствующих жестких элементов, в результате чего выходной вал, связанный с жестким колесом, получает вращательное движение, а винт — поступательное, ход которого в оба конца ограничен его длиной.
Таким образом, в рассмотренном электроприводе получено два вида движения — линейное и вращательное при использовании одного стандартного электродвигателя. Масса и габариты встроенных модулей по сравнению с рассмотренными выше уменьшаются вдвое, а коэффициент полезного действия, определяемый потерями базового двигателя и волновой передачи, остается прежним.
Промышленные роботы модульного типа на базе электромеханических волновых модулей Двурукий промышленный робот-перегрузчик
При создании модульных роботов-перегрузчиков предпочитают схему с несущей стойкой, позволяющей обеспечивать уравновешенную конструкцию, разворот вокруг своей оси и удобство энергоподводов. Недостаточно малая удельная мощность электродвигателей в таких конструкциях не может быть препятствием их использованию в электромеханических приводах для перемещения сравнительно легких подвижных звеньев. Разворот, подъем, покачивание и поступательное движение захватных органов конструктивно обеспечиваются с помощью однотипных электромеханических модулей вращательного движения или комбинации электромеханических модулей вращательного и поступательного движений.
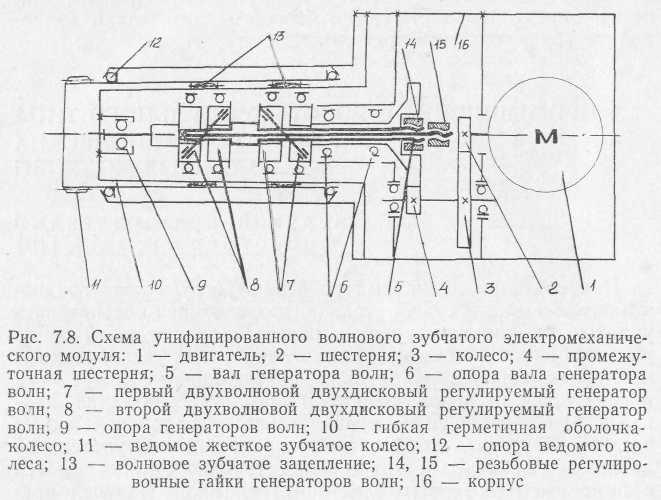
Кинематические схемы унифицированных приводных волновых зубчатого и резьбового модулей, использованных в конструкции ПР, показаны на рис. 7. 8 и 7. 9. Конструктивное построение и принцип их работы аналогичны рассмотренным модулям поступательного и вращательного движений (см. рис. 7. 3 и 7. 4) с той разницей, что в них применены принципы повышения кинематической точности волновых механизмов (см. 5. 3. 1). Волновой резьбовой модуль (см. рис. 7. 9) отличается от зубчатого (см. рис. 7. 8) наличием штока-гайки с резьбой, зацепляющейся с аналогичной резьбой гибкой оболочки, деформируемой генераторами волн.
Ниже приведены варианты двуруких модульных роботов-перегрузчиков, предназначенных для межоперационной загрузки-выгрузки деталей с телескопическим перемещением шарнирного многозвенника со схватом на конце. Манипуляторы роботов представляют собой унифицированные конструкции для перемещения схвата по горизонтали Y; подъема по вертикали Z; разворота W.
Привод по указанным координатам осуществляется от шагового двигателя и позиционной системы ЧПУ с шаговым электроприводом. Для контроля крайних положений по осям координат установлены бесконтактные датчики. Система управления обеспечивает наладочный (обучающий), полуавтоматический (покадровый) и автоматический режимы.
В манипуляторе (рис. 7. 10) по всем координатам в качестве приводов используется унифицированная конструкция электромеханического модуля вращательного движения (см. рис. 7. 8). Подъем исполнительных органов относительно колонны 1 производится с помощью рейки 2, с которой контактирует расположенная на выходном валу модуля 3 шестерня 4. Для поднимаемой каретки 5 предусмотрены направляющие 6. Модуль 7 через шестерню 8 и зубчатое колесо 9 обеспечивает вращение платформы 10, опирающейся на подшипники 11. Горизонтальное перемещение исполнительных органов осуществляется с помощью двух одинаковых модулей 12, на выходных валах которых установлены ведущие шестерни 13, зацепляющиеся с рейками 14, установленными на направляющих качения 15 корпуса 16. Поступательное перемещение реек через пантограф 17 передается захватному устройству 18.

В другом варианте манипулятора (рис. 7. 11) установленные на колонне 1 резьбовые волновые модули 2 штоками 3 поднимают каретку 4 по направляющим 5. Зубчатый волновой модуль 6 вращает на подшипниках 7 через зубчатые колеса 8 и 9 платформу 10. Резьбовые волновые модули 11 штоками 12 через пантографы 13 перемещают по горизонтали
захваты 14.
Двурукие промышленные роботы-перегрузчики характеризуют следующие параметры [11]:
Грузоподъемность, кг 2
Число степеней подвижности 4
Базовая система координат цилиндрическая

Линейные перемещения по координатным осям, мм:
продольное (ось у) 1500
вертикальное (ось z) 500
Вращательное перемещение относительно
оси z, град 360
Скорости перемещения по координатным осям, м/с:
y 0, 11
z 0, 28
Погрешность позиционирования, мм:
по координате у ±1, 5
по координате z ±0, 2
вращательное, град ±0, 1
Масса, кг 40