

2.3 Структуры оперативных данных Организация данных о состоянии приборов, устройств коммутационного поля, вызовов.
Материал по данному разделу изложен в [2], с. 74…83.
Вопросы для самоконтроля:
Какая процедура используется для обнаружения изменения состояния прибора?
От чего зависит период сканирования контрольных точек?
Какую структуру имеют массивы, отображающие состояние контрольных точек приборов?
Какую структуру имеют массивы состояний однозвенных полнодоступных коммутационных полей?
Какую структуру имеют массивы состояний многозвенных коммутационных полей?
Какая информация хранится в регистрах вызова?
Какие типы регистров вызовов используется в ПО?
3 Система коммутационных программ
3.1 Автоматная модель коммутационной станции
Состояния автомата и способы описания его функционирования. Понятия этапа установления соединения и этапа обслуживания вызова. Граф установления соединения. Характеристика языка SDL (Specification and Description Language – язык спецификаций и описаний).
Структура системы коммутационных программ, обеспечивающих обслуживание вызова, определена на основе автоматной модели коммутационной станции.
Состояние коммутационной станции, в целом, определить очень сложно, поэтому выделяют и рассматривают состояния индивидуального вызова. При этом вся коммутационная станция рассматривается как группа независимых автоматов, каждый из которых обрабатывает только один вызов. Любой алгоритм может быть реализован конечным автоматом, т.е. автоматом с конечным числом состояний.
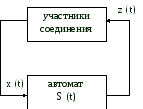
Рисунок 15
Процесс работы автомата может быть отражен с помощью состояний:
входов x(t) ={х1, х4…хn],
выходов z(t) ={z1,z4…zn],
внутренних (текущих) состояний S(t) ={S1,S2 .…Sn}
В текущем состоянии сосредоточено все то, что автомат знает о прошлом с точки зрения его будущего поведения. Реакция автомата на последующие входные сигналы определена его текущим состоянием.
Внутренние (текущие) состояния автомата могут быть устойчивыми и неустойчивыми.
Состояние автомата является устойчивымс момента выдачи выходного сигнала до ближайшего момента поступления входного сигнала. Длительность этого состояния определяется временем реакции участников соединения на полученный от автомата выходной сигнал. В устойчивом состоянии процесс функционирования автомата выходной сигнал. В устойчивом состоянии процесс функционирования автомата приостанавливается до момента получения очередного входного сигнала.
Состояние автомата является неустойчивым(переходным) с момента поступления входного сигнала до ближайшего момента выдачи выходного сигнала. Длительность этого состояния определяется временем работы ЭУС по переводу коммутационной станции для обслуживания вызова в новое устойчивое состояние.
Функционирование автомата можно задавать графом, в котором вершины соответствуют текущим состояниям, а дуги - переходам из одного состояния в другое.
Для описания процесса установления соединения используется граф переходов конечного автомата, в котором специфика того или иного вида соединения отражается в наборе вершин и конфигурации дуг (ребер) между ними. Для того, чтобы приблизить формальное описание процесса функционирования коммутационной станции к его содержательному описанию, вводятся понятия:
Этапа установления соединения еi– совокупность состоянийSiи выходных сигналовzi автомата в этих состояниях;
Этапа обслуживания вызова Eik– последовательность действий, выполняемых ЭУС для перевода коммутационной станции от этапа установления соединения еiк этапу еkпри поступлении входного сигналаxi.
Граф, вершинами которого является этапы установления, а ребрами – этапы обслуживания вызова, называется графом установления соединения.

Рисунок 16 – Граф установления соединения
|
е0 |
- |
АК свободен |
|
е1 |
- |
Посылка сигнала «ОС» (тракт приема номера проключен) |
|
е2 |
- |
Прием адресной информации |
|
е3 |
- |
Посылка сигналов ПВ и КПВ |
|
е4 |
- |
Разговор |
|
е5 |
- |
Подача сигнала «Занято» абоненту Б |
|
е6 |
- |
Подача сигнала «Занято» абоненту А |
|
х0 |
- |
Вызов абонентом А станции (шлейф замкнут) |
|
х1 |
- |
Отбой абонента А (шлейф разомкнут) |
|
х2 |
- |
Первый импульс (первая цифра) |
|
х3 |
- |
Последний импульс (последняя цифра) |
|
х4 |
- |
Ответ абонента Б |
|
х5 |
- |
Ответ абонента А |
Граф на рисунке 16 является упрощенным, т.к. в нем не отражены ситуации потерь вызовов из-за блокировки приборов, отсутствия свободных путей и др. Динамику реального процесса можно задать двумя способами: как определенную последовательность этапов установления соединения (е0,е1 …еn) или как определенную последовательность этапов обслуживания вызовов (Е01,Е12…Еin, Еno).
Таким образом, процесс установления любого вида соединения и процесс обслуживания соответствующего вызова имеют многоэтапный характер, причем этапы отделены во времени один от другого некоторыми промежутками, длительность которых определяется длительностью этапов установления соединения.
Язык SDL, рекомендуемый МСЭ-Т для применения на этапах проектирования АО, строится на базе автоматной модели коммутационной станции. Характеристика языка SDL приведена в [1], с.138…142; [2], с.66…69; [3],с. 29…41.