

7 Описание эхолотаes-60
7.1 Введение
Эта глава представляет собой короткое введение в комплекс рыбопоискового эхолота Simrad ES-60.
Рассматриваются следующие темы:
Обзор
Распространение звуковой волны
Донный эхосигнал
Режим с расщепленным лучом
Диапазон наблюдения
Технические характеристики
7.2 Обзор
7.2.1 Основные факты
Эхолоты SimradES60 спроектированы для профессионального рыболовного сообщества с внедрением самых последних технических достижений.
7.2.2 Распространение звуковой волны
Скорость распространения звуковой волны в море немного изменяется при изменении температуры, солености и давления. Скорость изменяется между 1440 и 1520 м/с на морском мелководье, в то время как на глубине 1000 м можно ожидать значение скорости равным 1480 м/с. На мелководье с пресной водой скорость приблизительно равна 1430 м/с.
Оптимальное среднее значение для использования в диалоговом окне ‘Environment’ (Окружающая среда)составляет 1470 м/с.
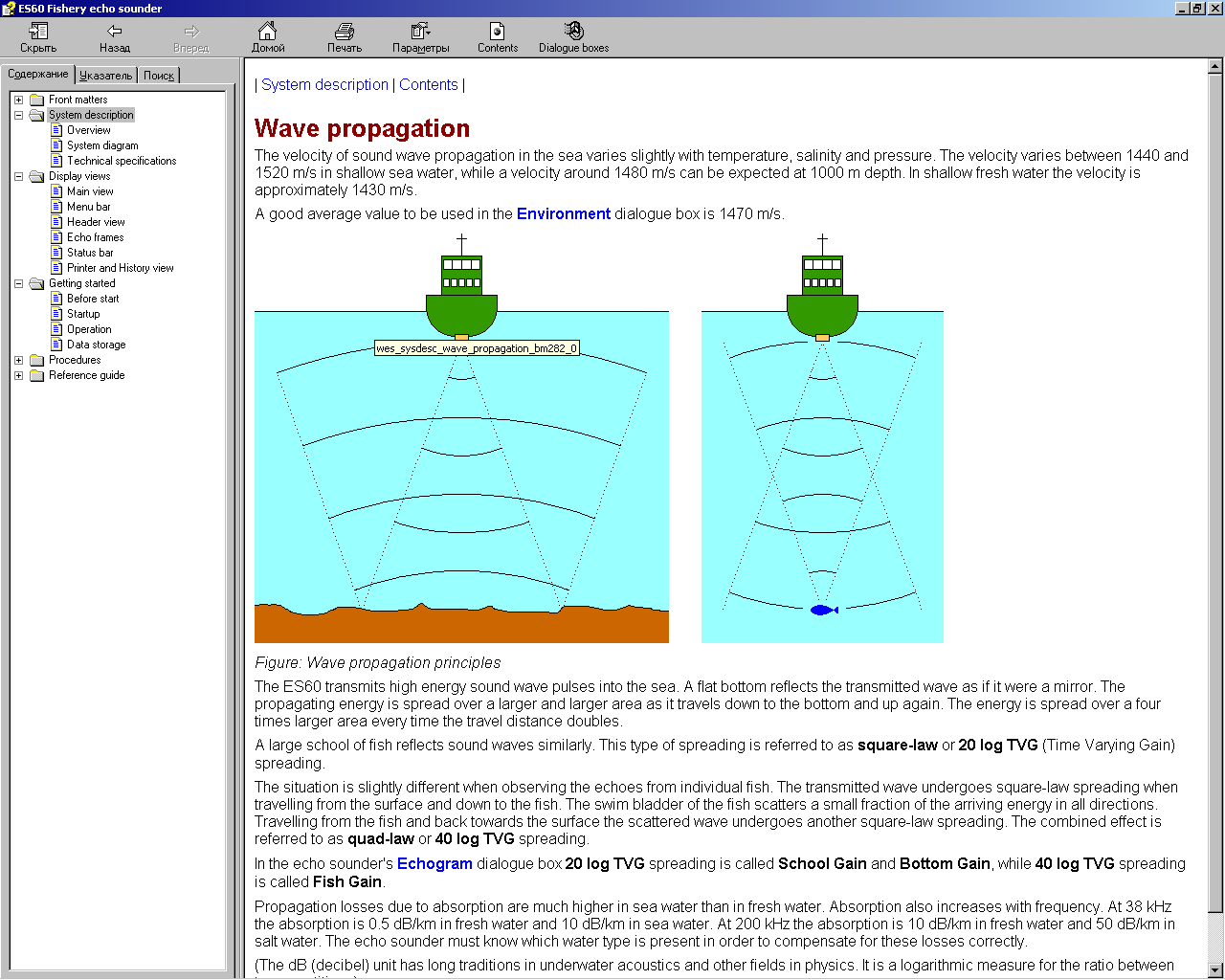
Рисунок: Принципы распространения звуковой волны
ES60посылает в море мощные импульсы звуковых колебаний. Ровное дно отражает посланную звуковую волну подобно зеркалу. Излученная энергия распространяется на все большую и большую площадь по мере того, как она продвигается вниз к дну и возвращается обратно. Энергия распространяется на площадь в четыре раза большую каждый раз, когда дистанция прохождения удваивается.
Подобным образом отражает звуковые волны большой рыбный косяк. Такой тип распространения называется распространением по квадратичному закону и соответствует закону ВАРУ 20logR.
Несколько иначе обстоит дело при наблюдении за эхосигналами от отдельных рыб. Излученная волна распространяется по квадратичному закону при прохождении от поверхности до рыбы. Плавательный пузырь рыбы рассеивает поступающую энергию понемногу во всех направлениях. При обратном прохождении от рыбы до поверхности рассеянная волна претерпевает еще одно распространение по квадратичному закону. Совокупный эффект называется распространением по закону четвертой степени и соответствует закону ВАРУ 40logR.
В эхолотном диалоговом окне ‘Echogram’ (Эхограмма) закон ВАРУ 20logRназывается ‘SchoolGain’ (Усиление для Косяка) или ‘BottomGain’ (Усиление для Дна), в то время как закон ВАРУ 40logRназывается ‘FishGain’ (Усиление для Рыбы).
Потери при распространении вследствие поглощения значительно больше в морской воде, чем в пресной. Потери также увеличиваются при увеличении частоты. При частоте 38 кГц поглощение составляет 0,5 дБ/км в пресной воде и 10 дБ/км в морской воде. При частоте 200 кГц поглощение составляет 10 дБ/км в пресной воде и 50 дБ/км в соленой воде. Эхолот должен знать тип воды в текущий момент времени, чтобы правильно компенсировать эти потери.
(Единица измерения децибел [дБ] является общепринятой в гидроакустике и других областях физики. Это логарифмическая мера измерения для соотношения между двумя величинами).
7.2.3 Донный эхосигнал
Плоское дно с твердым грунтом отражает излученный сигнал подобно зеркалу. Излученный импульс достигает всей зоны облучения дна практически одновременно и эхосигнал, отраженный от различных частей этой зоны возвращается к поверхности также практически одновременно.
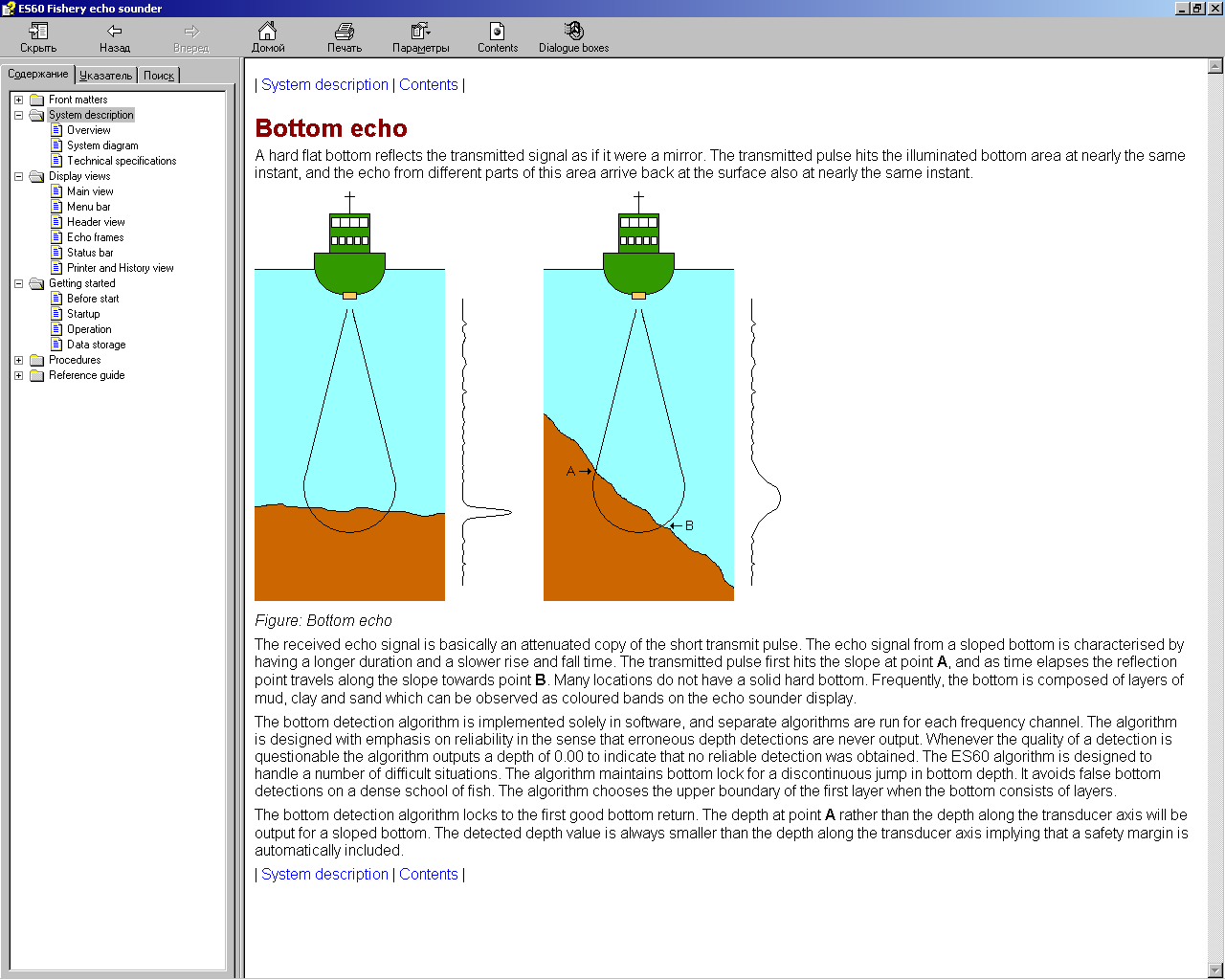
Рисунок: Донный эхосигнал
По существу, принимаемый эхосигнал представляет собой ослабленную копию короткого излученного импульса. Эхосигнал от наклонного дна характеризуется увеличенной длительностью и более медленными периодами нарастания и спада. Излученный импульс сначала соприкасается с наклонной плоскостью в точке Аи с течением времени точка отражения перемещается по наклонной плоскости к точкеВ. Дно с твердым плотным грунтом встречается редко. Чаще всего дно представляет собой сочетание слоев ила, глины и песка, которые можно наблюдать в виде цветных полос на дисплее эхолота.
Алгоритм обнаружения дна реализован исключительно в программном обеспечении, при этом автономные алгоритмы выполняются в каждом частотном канале. Алгоритм спроектирован с акцентом на надежность в том смысле, что ошибочные показания глубины никогда не отображаются. Всякий раз, когда точность обнаружения является сомнительной, алгоритм выдает значение 0.00, означающее, что надежное обнаружение не обеспечено. Алгоритм эхолота ES60спроектирован для работы в сложных ситуациях. Алгоритм обеспечивает привязку ко дну в условиях скачкообразных резких изменений глубины. Он исключает ложные обнаружения дна по плотному рыбному косяку. Алгоритм выбирает верхнюю границу первого слоя, если дно состоит из нескольких слоев.
Алгоритм обнаружения дна захватывает первый большой эхосигнал от дна. Для наклонного дна скорее будет отображаться глубина в точке А, чем глубина вдоль оси акустического преобразователя. Фиксируемая глубина всегда меньше глубины вдоль оси акустического преобразователя, вследствие чего автоматически увеличивается запас надежности.