

Тема II. Локальный базис криволинейной системы координат.
Пусть М х1х2х3
– некоторая криволинейная система
координат,
а – вспомогательная декартова прямоугольная
система координат. Известны функции
– вспомогательная декартова прямоугольная
система координат. Известны функции ,
которые связывают, декартовы и
криволинейные координаты, тогда локальный
базис криволинейной системы координат
определим как частные производные
радиус-вектора точки по криволинейной
координате. Мы получим тройку векторов,
зависящих от выбора точки, в которой
строится базис. Векторы локального
базиса меняют направление и величину
при переходе от одной точки к другой.
,
которые связывают, декартовы и
криволинейные координаты, тогда локальный
базис криволинейной системы координат
определим как частные производные
радиус-вектора точки по криволинейной
координате. Мы получим тройку векторов,
зависящих от выбора точки, в которой
строится базис. Векторы локального
базиса меняют направление и величину
при переходе от одной точки к другой.

где
 –
ортонормированный базис декартовой
системы координат, т.е.
–
ортонормированный базис декартовой
системы координат, т.е.
Рассмотрим различные криволинейные системы координат.
I. Полярная система координат
1) Введем полярные координаты:

2) Определим векторы
локального базиса в точке
 :
:
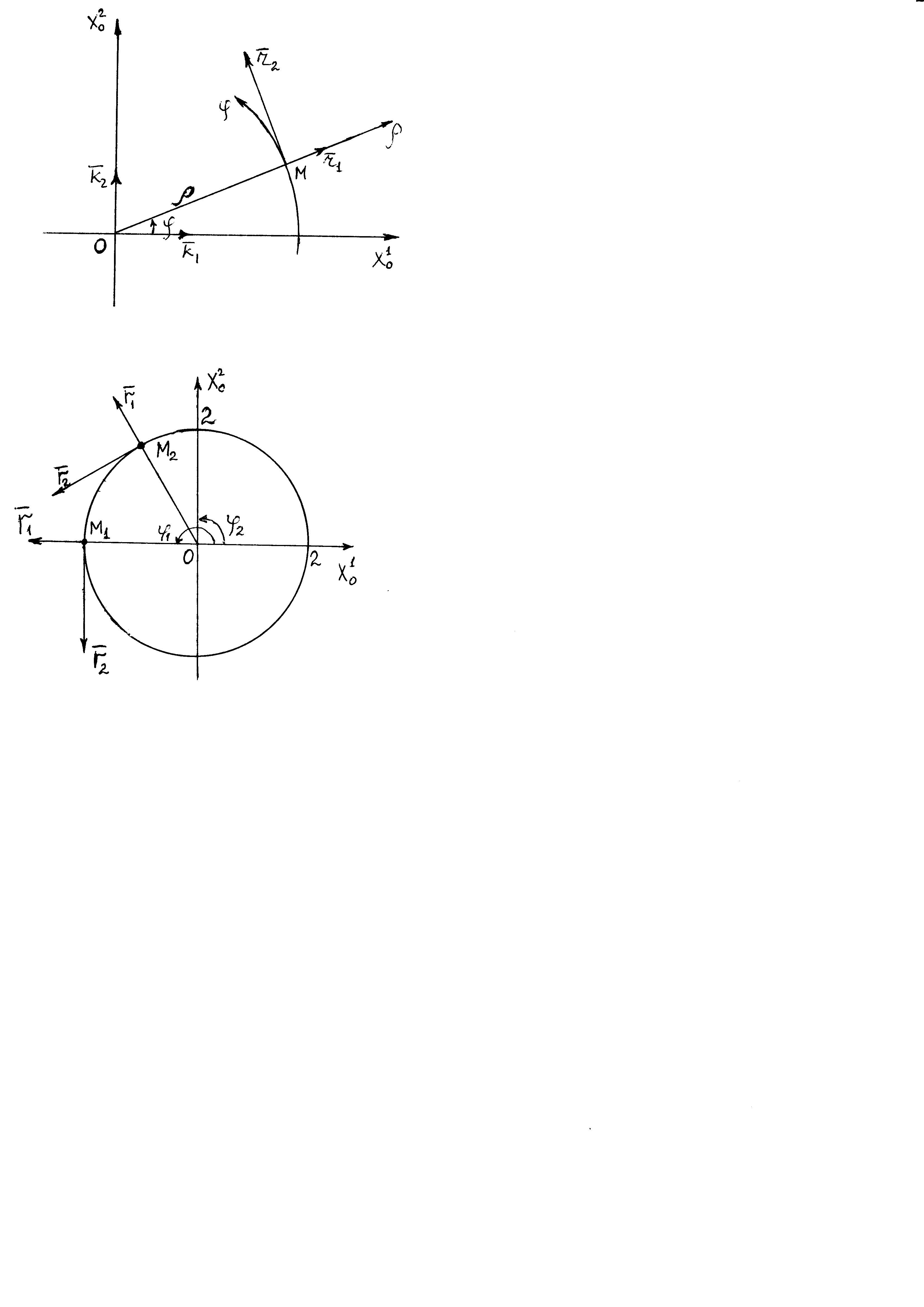
Рис. 1



3) Построим локальный базис в точке М (рис. 1), для этого проведем через эту точку координатные линии полярной системы координат. Вдоль координатной линии изменяется только одна координата. Поэтому фиксируем каждую из координат и проводим координатную линию другой координаты. В точке М строим векторы локального базиса, которые являются касательными векторами, направленными в сторону возрастания соответствующей координаты. Длины векторов локального базиса, определяются их модулями.
Построим локальные базисы в точках М1(2; 2π/3), М2(2; π), рис. 2.
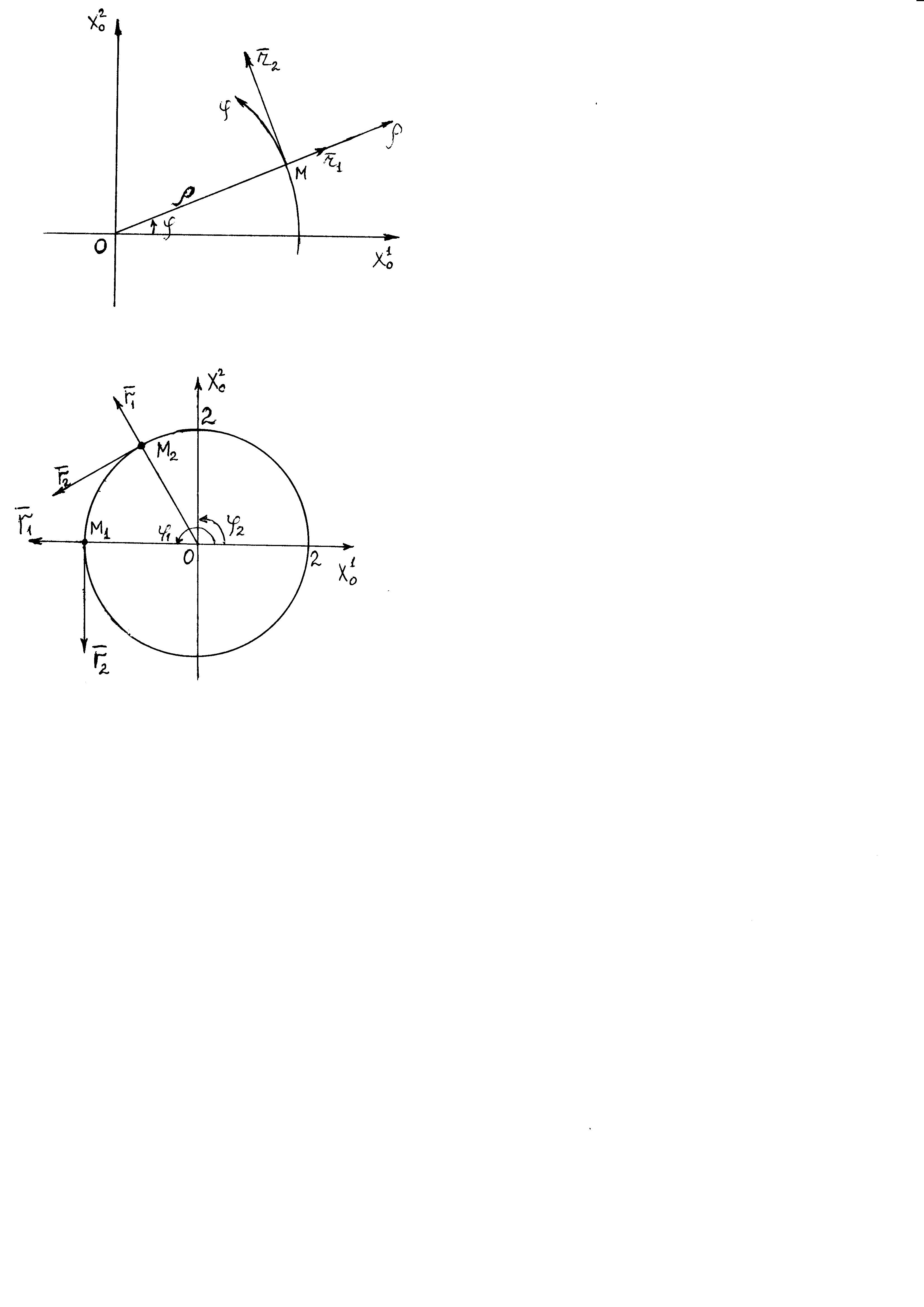
Рис. 2
II. Цилиндрическая система координат
1) Введем цилиндрические
координаты: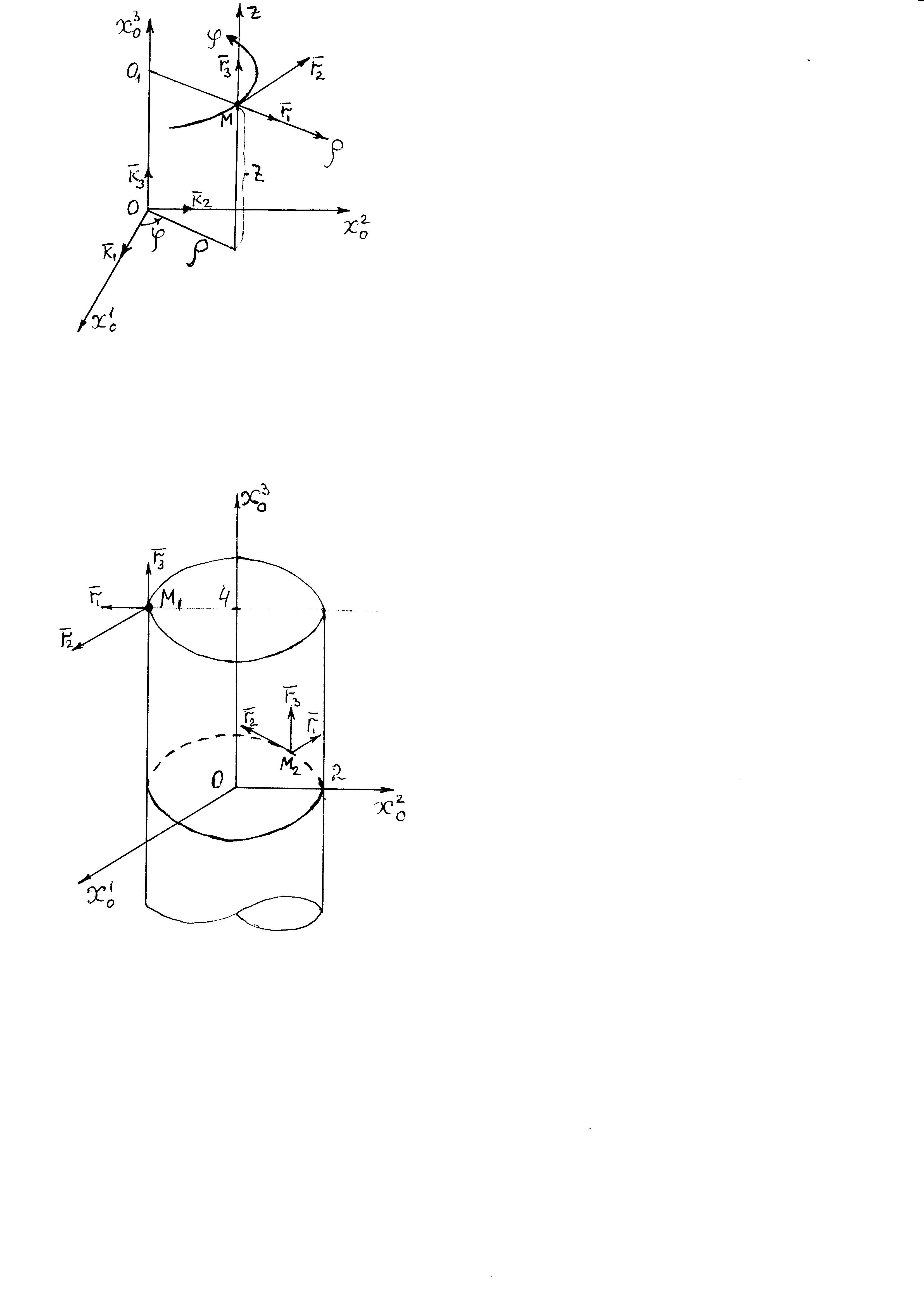


2) Определим векторы
локального базиса в точке
 :
:

Рис.
3.



3) Построим локальный базис в точке М (Рис. 3), для этого проведем через эту точку координатные линии цилиндрической системы координат. Вдоль координатной линии изменяется только одна координата. Поэтому фиксируем две координаты и проводим координатную линию третьей координаты. В точке М строим векторы локального базиса, которые являются касательными векторами к координатным линиям. Базисные векторы направлены в сторону возрастания соответствующей координаты. Длины векторов локального базиса, определяются их модулями.
Построим локальные базисы в точках М1(2; 3π/2; 4), М2(2; π; 0), рис. 4.
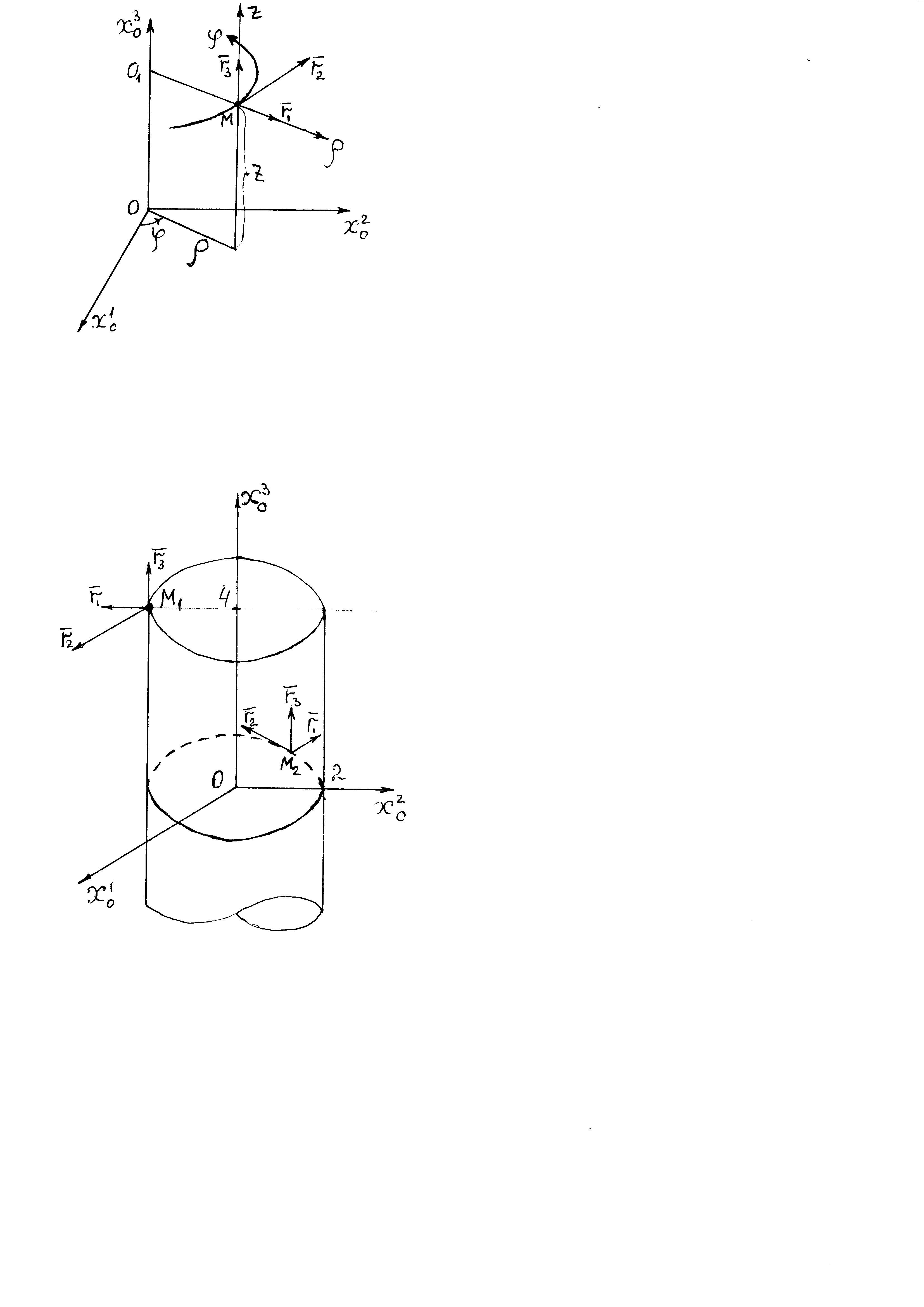
Рис. 4
III. Сферическая система координат
1) Введем сферические координаты:
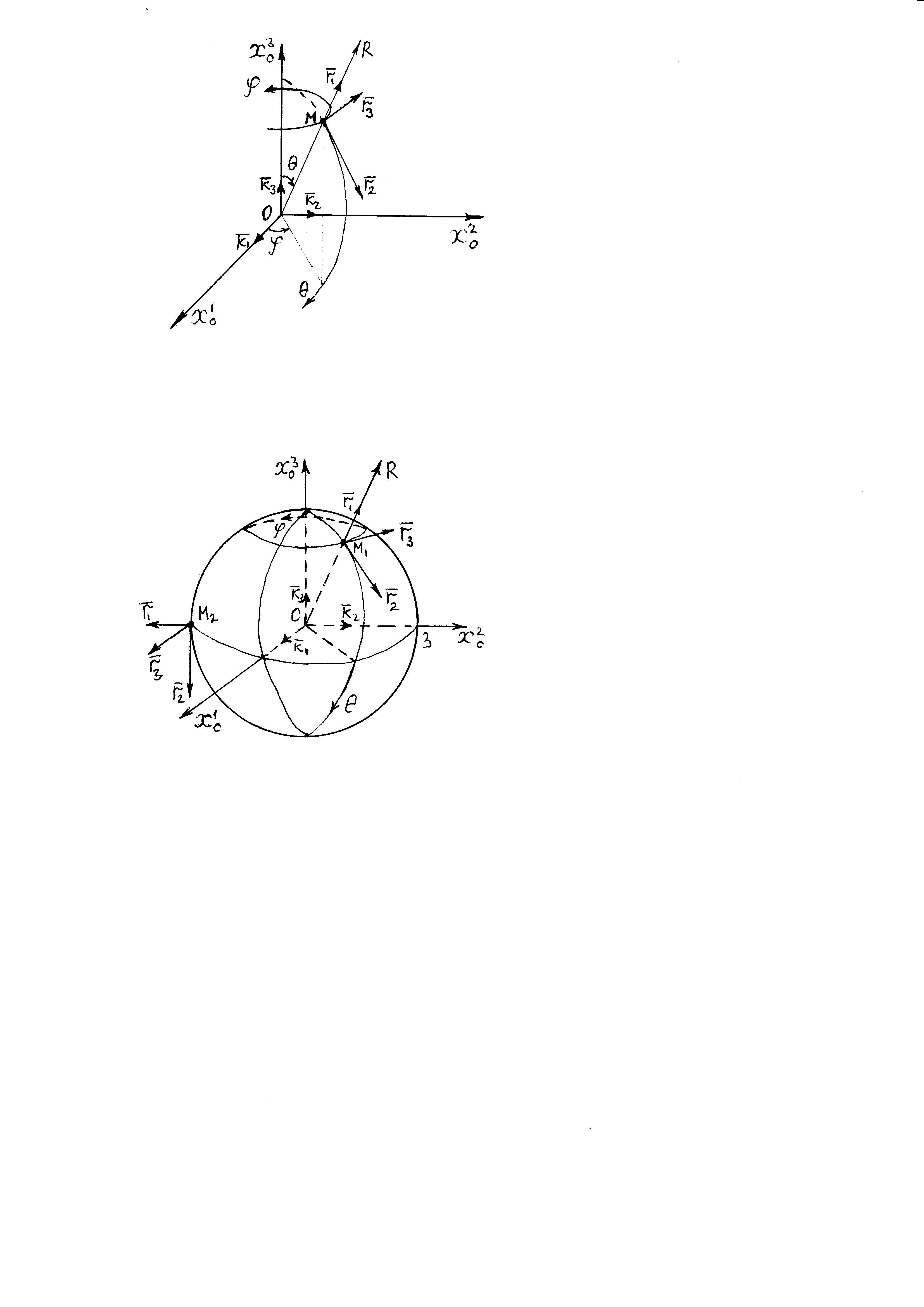

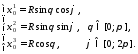
Рис. 5
2) Определим векторы
локального базиса в точке
 :
:






т.к.

3) Построим локальный базис в точке М, для этого проведем через эту точку координатные линии сферической системы координат. Вдоль координатной линии изменяется только одна координата. Поэтому фиксируем две координаты и проводим координатную линию третьей координаты. В точке М строим векторы локального базиса, которые являются касательными векторами к координатным линиям. Базисные векторы направлены в сторону возрастания соответствующей координаты. Длины векторов локального базиса, определяются их модулями.
Построим локальные базисы в точках М1(3; π/6; π/4), М2(3; π/2; 3π/2). Рис. 6.
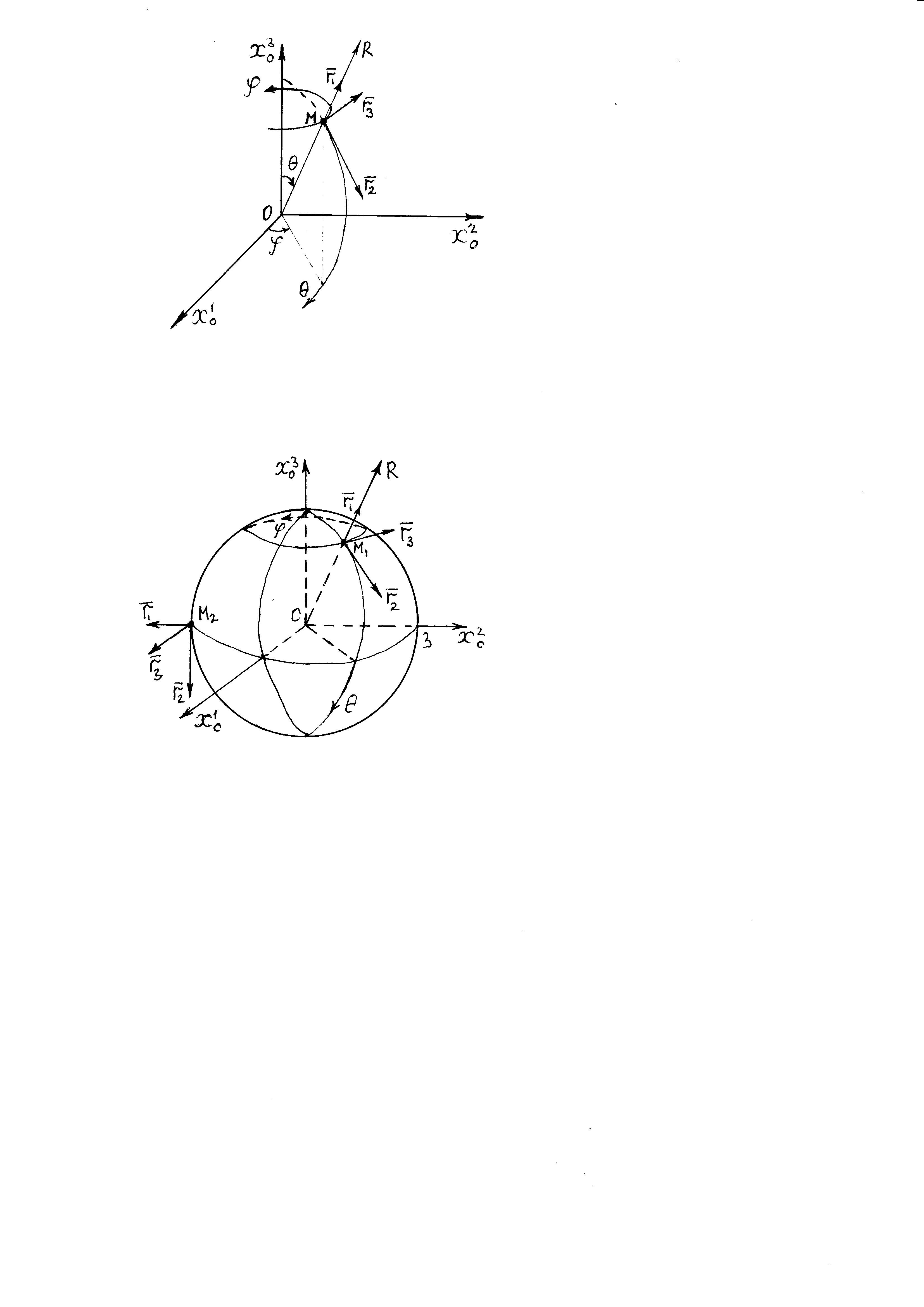
Рис. 7
IV. Тороидальная система координат.
Эту систему координат изучите самостоятельно.