ЦСП для Заочников ч.1 / Учебники по ЦСП / Сети PDH. Лекции СибГУТИ
.docx
Сети PDH
|
Содержание |
назад | вперёд |
|
|
Введение 1. Историческая справка о развитии цифровой связи 2. Цифровая передача аналоговых сигналов 3. Принципы формирования канального цифрового сигнала с ИКМ 3.1. Дискретизация во времени 3.2. Квантование по уровню 3.3. Кодирование 3.4. Амплитудные характеристики канала ЦСП с ИКМ 4. Принципы формирования канальных сигналов в разностных ЦСП 4.1. Дифференциальная импульсно-кодовая модуляция 4.2. Дельта модуляция 5. Основы построения первичной многоканальной ЦСП с ИКМ 5.1 Нелинейное кодирование и декодирование сигналов 5.1.1. Принцип построения группового АИМ-тракта 5.1.2. Кодирующие и декодирующие устройства с аналоговым компандированием 5.1.3. Цифровые кодирующие и декодирующие устройства 5.2 Генеральное оборудование и системы синхронизации 5.2.1. Генеральное оборудование 5.2.2. Система тактовой синхронизации 5.2.3. Система цикловой синхронизации 5.2.4. Система сверхцикловой синхронизации 6. Оборудование цифрового линейного тракта с электрическим интерфейсом 6.1. Источники искажений и помех в цифровом линейном тракте. 6.1.1. Структура цифрового линейного тракта. 6.1.2. Причины возникновения искажений и помех в ЦЛТ. 6.1.3. Способы оценки влияния искажений и помех. 6.2. Регенерация линейных сигналов в ЦСП 6.2.1. Требования к линейным сигналам 6.2.2. Линейные коды в ЦСП 6.2.3. Регенерация линейных сигналов. 6.3. Коррекция искажений в ЦЛТ. 6.4. Влияние помех на качество передачи сигналов в ЦСП. 6.4.1. Влияние собственных помех на вероятность ошибки при приеме цифрового сигнала. 6.4.2. Влияние помех от линейных переходов на вероятность ошибки. 6.4.3. Накопление помех в ЦЛТ 6.4.4. Влияние помех на размещение регенераторов в ЦЛТ. 6.5. Перспективы совершенствования линейных трактов ЦСП |
|
ЛЕКЦИЯ № 1 |
назад | оглавление | вперёд |
|
|
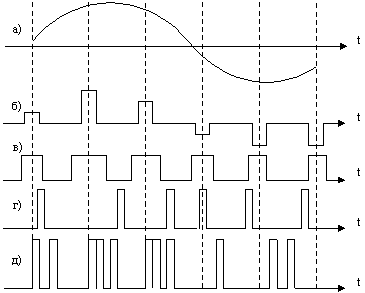
1. Историческая справка о развитии цифровой связи. Первые шаги цифровой передачи сигналов связаны с развитием электрического телеграфа. Неэлектрические системы передачи сигналов появились более 2000 лет назад. Греческий военачальник Полибий применял в 300 г. до нашей эры схему сигнализации из 10 факелов, а римские войска широко использовали одну из разновидностей семафорной связи [12]. В начале XIX века сложилась ситуация, когда трудами и исследованиями Г. Х. Эрстеда, Ампера, Гаусса, Вебера, С. Т. Зёммеринга и других ученых была создана теоретическая и практическая база для создания электрической телеграфной связи. Основным стимулом для создания и широкого внедрения телеграфной связи явилось развитие железных дорог, начиная с 1830 г. Даже на заре своего существования железнодорожные поезда могли перемещаться со скоростью до 80 км/час, и поэтому потребовалась система связи, обеспечивающая передачу информации со скоростью, соизмеримой со скоростью движения поездов. В 1832 г. русским ученным П. Л. Шиллингом был создан первый телеграфный аппарат пригородный для эксплуатации. Усилиями английских исследователей Уитстона и Кука телеграфный аппарат Шиллинга был внедрен в практическую эксплуатацию в 1837 г. на магистрали Лондон – Бирмингем. После этого телеграфные системы начали быстро внедряться и к 1870 г. они существовали во всем мире. Основным барьером для прогресса телеграфной связи явилось то обстоятельство, что для каждой пары телеграфных аппаратов (на передаче и приеме) требовалась отдельная линия связи. Следующим этапом развития цифровой передачи в виде телеграфных сигналов явилось многократное использование одной линии связи для передачи нескольких сообщений, что существенно повышало эффективность использования линейных сооружений. Первая работоспособная многоканальная система передачи, основанная на временном объединении телеграфных сигналов, была создана молодым инженером французской телеграфной службы Ш. Бодо в 1875 г. При ее разработке были успешно решены несколько технических проблем, важнейшими из которых являются – синхронизация передающей и приемной частей системы передачи, а также внедрение в практику равномерного 5-ти разрядного телеграфного кода. В знак заслуг Бодо в области передачи цифровых сигналов его именем названа единица телеграфирования: Бод – количество телеграфных символов передаваемых за 1 сек. К 1872 г. большая часть основных методов передачи была открыта и реализована в том или ином виде. В том же году американец Александр Белл начал работать над созданием тонального телеграфа, что в конце концов привело его к изобретению телефона в 1876 г. В качестве средства общения телефон обеспечивал быстроту, удобство и живой контакт между абонентами. Начиная с 1868г. телефон начал доминировать как средство связи. Телефонная связь предусматривала передачу аналоговых сигналов, и развивающиеся сети связи в основном рассчитывались на осуществление передачи аналоговых сигналов, а цифровая передача (телеграфия) все в большей степени приспосабливалась под характеристики аналоговых сетей. К 1950 г. системы связи были почти полностью аналоговыми, за исключением телеграфных систем, работающих на длинных магистралях подводного кабеля, и некоторых систем радиосвязи. Необходимость передачи широкополосных аналоговых телефонных сигналов, чувствительных к искажениям и помехам, стимулировало развитие методов цифровой передачи сигналов основным преимуществом которых является значительно большая помехозащищенность по сравнению с аналоговыми сигналами [1]. В конце 20-х – начале 30-х годов XX века трудами Г. Найквиста [3], В. А. Котельникова [4,5], позднее К. Шеннона [6] была создана фундаментальная теория цифровой передачи сигналов. Важнейшим практическим результатом явился вывод о том, что любой непрерывный аналоговый сигнал с ограниченным спектром может быть представлен дискретным во времени сигналом в виде амплитудно-импульсной модуляции (АИМ). Первым видом цифровой передачи аналоговых сигналов была широтно-импульсная модуляция (ШИМ), изобретенная Р. Хайзингом в 1924 г. [1]. Хотя он не был непосредственной заинтересован в цифровой передаче; его цель заключалась в применении широтно-импульсной модуляции для повышения КПД радиоусилителей. Решающие шаги в изобретении истинно цифрового кодирования аналоговых сигналов были сделаны французом, работающим в лабораториях компании ИТТ, А. Ривзом в период 1936 – 1937 гг. [2]. Его первым вкладом было открытие еще одного вида модуляции – импульсно-временной модуляции (ВИМ). При этом информация представлялась временем появления импульса относительно некоторой определенной шкалы времени (рис. 1.1.)
Рис 1.1. Виды импульсной модуляции: а – модулирующий сигнал; б – амплитудно-импульсная модуляция; в – широтно-импульсная модуляция; г – фазоимпульсная модуляция; д – импульсно-кодовая модуляция. Следующим, важнейшим шагом было осознание Ривзом того факта, что квантованием оставшегося аналогового параметра сигнала (амплитуды) и представлением его в виде двоичного кода можно добиться высокой помехоустойчивости. Это заключением привело Ривза к изобретению импульсно-кодовой модуляции (ИКМ). Что касается европейских исследователей, то дальнейшее развитие техники ИКМ вскоре было прервано войной 1939-1945 гг., в результате чего уточнение основных идей Ривза произошло в Америке. В 1947 г. ученые Телефонных лабораторий фирмы “Белл” опубликовали первое сообщение о полностью работоспособной системе с ИКМ [2]. Примерно в то же время Делорен во Франции и Л. А. Коробков в СССР изобрели дельта-модуляцию (ДМ). Следующим видом цифровой передачи было разработка Каплером в 1950 г. [2] методов дифференциальной импульсно-кодовой модуляции (ДИКМ). Эти способы передачи аналоговых сигналов в дифференциальном виде: ИКМ, ДМ и ДИКМ (и их модификации в виде адаптивных АДМ и АДИКМ), служат основой для построения современных телекоммуникационных систем. Фундаментальные проблемы ИКМ, как указывалось выше, были в основном решены к 1947г. однако прошло еще 15 лет, прежде чем первая коммерческая система была внедрена на сети связи (система Т1 в США). Задержка во внедрении объясняется двумя факторами, а именно: отсутствием потребности в системе и отсутствием соответствующей поддерживающей технологии. Аппаратура с ИКМ на основе технологии 1947 г. была реализована на базе коммутирующего прибора в виде электронных ламп и по этой причине была громоздкой, скорее ненадежной, потребляла большую мощность и имела тенденцию к сильному нагреву. Однако в 1949 г. в США Дж. Бардиным??? и У. Шокли были изобретены полупроводниковые транзисторы – плоскостные триоды. Для разработки транзисторов и внедрению их в промышленное производство потребовалось еще около 10 лет и в 1957 г. был создан почти идеальный коммутационный прибор: небольшой, очень быстродействующий, надежный и потребляющий незначительную энергию. Именно транзисторы были основой первой системы с ИКМ типа Т1 (США). К началу 60-х годов ХХ в. появилась и потребность в цифровых системах передачи (ЦСП). Она диктовалась непрерывным ростом числа телефонов и возрастанием нагрузки на кабельную сеть, в частности, в больших городах. В принципе эта проблема могла бы быть решена простым увеличением числа кабелей однако при этом потребовались бы колоссальные затраты на прокладку все новых и новых подземных кабельных коммуникаций. Альтернативой этому решению явилось создание многоканальных систем передачи работающих по существующей кабельной сети и увеличивающей ее емкость на несколько порядков. Однако аналоговые системы передачи (АСП) с частотным разделением каналов (ЧРК) использовать оказалось практически невозможно, так как кабели телефонной сети (в России кабели типа Т, ТГ, ТПП и др.) рассчитаны на работу в низкочастотном диапазоне, а в области высоких частот характеризуются огромными переходными влияниями и высоким уровнем шумов. Решить проблему создания многоканальных систем передачи, работающих по кабелям существующей телефонной сети, оказалось возможным только при помощи ЦСП с ИКМ. Первым участком сети, на которых начиналось внедрение систем передачи с ИКМ во всех странах мира, явились соединительные линии между городскими автоматическими телефонными станциями (АТС). Первая система Т1 оказалась очень удачной и получила применение во всех странах мира и представляет собой прототип современных ЦСП с ИКМ. Внедрение систем с ИКМ на межстанционных соединительных линиях было поворотным моментом во внедрении цифровых методов передачи. С тех пор началась бурная “цифровизация” сетей связи на всех участках: местном, внутризоновом и магистральном. В промышленно развитых странах мира (Япония, Франция, США и др.) существующие сети связи являются полностью цифровыми. В России развитие сети связи также осуществляется только на основе ЦСП с ИКМ. Как указывалось выше, первое поколение ЦСП с ИКМ разрабатывалось, в основном, для передачи в цифровом виде телефонных сигналов. Однако, к концу ХХ в. цифровые системы первого поколения оказались малоприспособленными для создания многофункциональных цифровых сетей, позволяющих предоставлять пользователям самых широких видов услуг, кроме цифровых телефонных каналов, включающих в себя: каналы звукового вещания, цифрового телевидения, передачи данных, факсимильные каналы, видеотелефон, организация видеоконференций и других, например, в рамках цифровой сети интегрального обслуживания (ISDN – Integrated Services Digital) или широкополосной B-ISDN (Broadband ISDN). Поэтому международным союзом электросвязи (Секция телекоммуникаций – МСЭ-Т) или ITU-T (International Telecommunication Union - Telecommunication) было принято решение о создании ЦСП с ИКМ следующего поколения, названных системами передачи SDH, в отличие от ЦСП первого поколения, названных системами передачи PDH. Первый пакет стандартов, регламентирующий принципы построения телекоммуникационных систем SDH, был принят ITU-I в 1988 г. С тех пор эти стандарты неоднократно уточнялись и изменялись, а их основой являлась американская система передачи типа “Sonet” (Synchronous Optical Network), развернутая к тому времени на сети связи США. Технологической основой систем SDH являются волоконно-оптические линии связи и системы передачи (ВОЛС и ВОСП), осуществляющие передачу цифровых сигналов в оптическом диапазоне. Цифровые сигналы SDH низших порядков могут передаваться в виде электрических сигналов по цифровым радио-релейным линиям связи (ЦРРЛ) и спутниковым каналам. Теоретической и практической базой создания систем SDH являлись два фактора: создание источников света в виде лазеров с высокой эффективностью, основанных на открытии лазерного излучения, сделанным в 1962 г. Н. Г. Басовым, А. М. Прохоровым (Россия) и относительно дешевых оптических кабелей с малым затуханием. Дальнейший материал книги посвящен изучению принципов построения телекоммуникационных систем PDH и SDH. |
|
ЛЕКЦИЯ № 2 |
назад | оглавление | вперёд |
|
|
2. Цифровая передача аналоговых сигналов аналоговым
сигналом в системах передачи называется
непрерывный электрический или
оптический сигналы, параметры которого
(амплитуда, частота или фаза) изменяются
по закону непрерывной функции времени
источника информации, например,
речевого сообщения, подвижного или
неподвижного изображения и т.д.
Непрерывные сигналы могут принимать
любые значения (бесконечное множество)
в некоторых пределах. Дискретные
сигналы – состоят из отдельных
элементов, принимающих конечное число
различных значений. Аналоговые
дискретные сигналы можно получить из
непрерывных, используя дискретизацию
по времени (через интервал Тд),
квантование по амплитуде (через
интервал
Преобразование непрерывного сигнала в цифровой может быть реализовано в виде обобщенной структурной схемы канала ЦСП приведенной на рис. 2.2. Формирование цифрового сигнала может осуществляться при помощи ИКМ, ДМ, ДИКМ и их модификаций. Таким образом, для получения цифрового сигнала принципиально необходимо произвести три основные операции над непрерывным сигналом: дискретизацию по времени, квантование по амплитуде (по уровню), кодирование.
Рис. 2.1. Дискретные сигналы: а – дискретный по времени; б – дискретный по уровню; в – дискретный по времени и по уровню; г – цифровой сигнал.
Рис. 2.2. Обобщенная структурная схема канала ЦСП: ИИ – Источник информации в виде непрерывного сигнала; ДВ – Дискретизатор по времени; КУ – Квантователь по уровню; АЦП – Аналого-цифровой преобразователь; ЛП – Линия передачи; ЦАП – Цифро-аналоговый преобразователь; УВ – Устройство Восстановления Дискретного аналогового сигнала в непрерывный. ПИ – Приемник информации |

|
ЛЕКЦИЯ № 3 |
назад | оглавление | вперёд |
|
|
3. Принципы формирования канального цифрового сигнала с ИКМ 3.1. Дискретизация во времени. Преобразование
непрерывного аналогового сигнала в
дискретный может быть осуществлено
в соответствии с теоремой отсчетов,
доказанной В.А. Котельниковым в 1933 г.:
любой непрерывный сигнал с ограниченным
частотой FМАКС
спектром, может быть полностью
представлен в виде своих дискретных
во времени отсчетов, взятых через
интервал времени Тд
Рис. 3.1. Формирование АИМ сигнала. Сигналы АИМ-1 и АИМ-2 в общем случае имеют различную форму, а значит их частотные спектры G1(f) и G2(f), определяемые ??????? преобразованием Фурье:
также
имеют разный вид. Однако, если
длительность АИМ отсчетов
Легко
показать, что при
или где G(f) спектр исходного сигнала ограниченный минимальной (FМИН) и максимальной (FМАКС) частотами. Вид
частотного спектра G(f) для АИМ сигнала
при Тд
>>
Рис. 3.2. Спектральный состав АИМ сигнала. Частотный спектр модулированной последовательности при АИМ содержит:
При дискретизации двух полярных сигналов (телефонных, звукового вещания) в спектре АИМ сигнала практически отсутствуют постоянная составляющая и ее гармоники [9]. Из
рис. 3.2 видно, что для восстановления
исходного непрерывного сигнала из
АИМ сигнала, на приеме достаточно
поставить ФНЧ (или фильтр-интерполятор)
с частотой среза, равной FМАКС,
который выделит исходный сигнал.
Поскольку при организации телефонного
канал FМАКС = 3,4
кГц, то Fд
должна выбираться из условия Fд
и позволяет достаточно просто реализовывать канальные фильтры-интерполяторы. Кроме того, выбор Fд = 8 кГц обусловлен тем, что эта частота кратна 2, что позволяет существенно упростить оборудование ЦСП с ИКМ, передающих цифровые сигналы на основе двоичной системы счисления. Анализ спектрального состава АИМ сигнала, приведенного на рис. 3.2, позволяет подтвердить правильность выводов теоремы отсчетов. Как видно из рис. 3.2, для того чтобы не возникло необратимых частотных искажений в спектр непрерывного сигнала не должны попадать частотные составляющие нижней боковой полосы частот при Fд, то есть:
Fд
– FМАКС
или
Fд Итак,
при выполнении операции дискретизации
во времени необходимо правильно
выбрать частоту дискретизации, которая
определяется параметром FМАКС
непрерывного сигнала: Fд 3.2. Квантование по уровню. Как видно из рис. 3.2, АИМ-сигнал является дискретным во времени, но непрерывным по уровню, так как амплитуда отсчетов может принимать бесконечное множество значений. Однако любая аппаратура обработки сообщений и систем передачи имеет конечную разрешающую способность. Это связано как с ошибками, возникающими при обработке сигналов, так и с наличием шумов и искажений в аппаратуре и каналах передачи. В связи с этим нет необходимости передавать все бесконечное множество амплитудных значений непрерывных сигналов, его можно ограничить конечным множеством, содержащим определенное, заранее установленное для того или иного вида сигналов число “разрешенных” амплитудных значений. Эти “разрешенные” для передачи амплитудные значения сигнала называются уровнями квантования; выбор их количества определяет качество передачи сигналов [6]. При
квантовании по уровню весь возможный
динамический диапазон сигнала от
UМАКС
до UМИН
разбивается на разрешенные уровни
(если электрический сигнал передается
в виде АИМ напряжения непрерывного
сигнала: F(t) = U(t)). Разность между двумя
соседними разрешенными для передачи
уровнями называется шагом квантования
. Если амплитуда
отсчета сигнала UАИМ(t)
в пределах двух соседних разрешенных
значений превышает половину шага
квантования
Разность
между истинным значением отсчета и
его квантованным значением называется
ошибкой, или шумом квантования, который
определяется как
Произведя “нумерацию” уровней квантования можно передавать не сами уровни, а их значения по шкале уровней в двоичном коде. В этом случае на приеме восстановить квантованный по уровню сигнал достаточно просто:
UКВ(t)пр
= li* где li= (0, lМАКС) – номер разрешенного уровня в десятичной системе счисления;
lМАКС – максимально возможный уровень квантования, который определяется из условия:
UКВ(t)МАКС
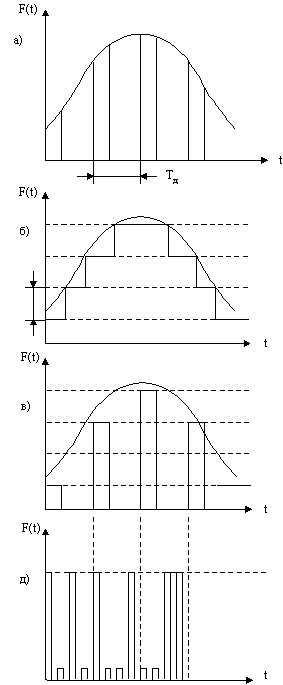
= lМАКС* Указанные выше преобразования иллюстрируются рис. 3.3.
Рис. 3.3. Принципы квантования по уровню и формирования канального сигнала с ИКМ. Выбор
шага квантования
Энергетический
спектр шумов квантования аналогичен
энергетическому спектру “белого
шума” и имеет равномерный характер
в диапазоне частот: -
Плотность
распределения вероятности W(x) шума
квантования в пределах одного шага
квантования в интервале от -
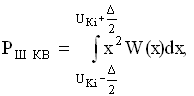
Рис. 3.4. Плотность распределения вероятности шума квантования. Средняя мощность случайного процесса с нулевым средним значением и одномерной плотностью распределения вероятности (каковым является шум квантования), определяется следующим образом [8]:
где
UKi
= li* х – случайная величина погрешности квантования;
Так как погрешность квантования внутри каждого шага квантования имеет равномерный характер (рис. 3.3) можно для простоты принять UKi = 0 и получить (из 3.2) выражение:
Мощность шума квантования не должна превышать допустимую норму на помехи на выходе канала, предназначенного для передачи различных аналоговых сигналов. Поскольку системы передачи с ИКМ плезиохронной цифровой иерархии (PDH) разрабатывались для передачи телефонных сообщений, далее определим минимально необходимое число уровней квантования при организации телефонного канала в ЦПС с ИКМ. Известно,
что согласно требованиям МСЭ-Т [8,9]
суммарная допустимая мощность помех
РП При этом эффективное значение мощности шума квантования будет равно:
где КПС = 0,75 псофометрический коэффициент, учитывающий чувствительность человеческого уха к различным частотным составляющим помех.
Наконец,
учтем то обстоятельство, что мощность
квантования на выходе ФНЧ распределена
в полосе частот 0
Для
оценки действия помех в каналах систем
передачи пользуются параметром,
который называется защищенностью и
определяется следующим образом:
Величина средней мощности телефонного сигнала при передаче по каналу ТЧ известна [8,10] и равна величине РСР ТФ = 32 мВт. Отсюда допустимая защищенность от шумов квантования
Средняя
мощность
Телефонный (ТФ) сигнал имеет характеристику, называемую пик-фактором:
а
UМАКС
зависит от шага квантования и их числа
(3.1): UМАКС = lМАКС *
ТФ
сигнал в канале ТЧ передается в полосе
частот 0,3
Поставим (3.4) и (3.5) в выражение для защищенности RШ КВ м и приравняем его допустимому значению RШ КВ доп
и
определим lМАКС
при передаче ТФ сигнала в канале ЦСП
с ИКМ, учитывая что q = (50
lМАКС
= 1080
Такое число уровней квантования оказывается чрезмерно большим, но его можно значительно снизить принудительно уменьшая пик-фактор ТФ сигнала на передаче и восстанавливая его на приеме. Так, если уменьшить пик-фактор на передаче до величины q = 4,75 количество уровней квантования также резко уменьшится и составит величину lМАКС = 102. На практике изменение и восстановление пик-фактора сигнала (или динамического диапазона) осуществляется при помощи системы компандирования: на передающей стороне на входе АЦП включается устройство, которое называется компрессором (сжимателем) динамического диапазона, а на приеме на выходе ЦАП включается экспандер (расширитель) динамического диапазона. То есть в обощенную структурную схему рис. 2.2 вводятся дополнительные блоки, как показано на рис. 3.5.
Рис. 3.5. Система компандирования в ЦСП с ИКМ. Для того, чтобы избежать искажений при передаче сигналов компрессор и экспандер должны иметь взаимнообратные амплитудные характеристики, как показано на рис. 3.6.
Рис. 3.6. Использование компандерных устройств для сжатия динамического диапазона: а – амплитудные характеристики компандера; б – сигнал на выходе компрессора. Здесь кривая 1 – амплитудная характеристика компрессора, кривая 2 – амплитудная характеристика экспандера, кривая 3 – результирующая амплитудная характеристика цепи компрессор-экспандер, которая должна быть линейной. Как
видно из рис. 3.6, значительно увеличивается
амплитуда малых сигналов (отсчет 1) и
мало меняется амплитуде больших
сигналов (отсчет 2), то есть уменьшается
как динамический диапазон сигнала
Итак, отметим что операция квантования по уровню позволяет преобразовать бесконечное множество отсчетных значений аналогового сигнала в конечное множество разрешенных уровней, перенумеровать эти уровни и передавать информацию об амплитуде отсчета в виде двоичной кодовой комбинации с ИКМ. Для уменьшения числа разрешенных уровней квантования применяется нелинейная операция сжатия динамического диапазона сигнала. 3.3. Кодирование. Операция кодирования заключается в преобразовании номера “разрешенного” уровня в кодовую комбинацию двоичной системы счисления, состоящую из m символов вида “0” и “1”, где величина m называется разрядностью кода. Существует большое число двоичных систем кодирования, однако в ЦСП с ИКМ нашли применение натуральный двоичный код и его модификация – симметричный двоичный код [11]. При использовании натурального кода любое положительное десятичное число li, не превышающее величины lМАКС (li = 0, lМАКС), может быть представлено в виде комбинации из m двоичных символов по следующему алгоритму:
m – разрядность кода. Очевидно, что lМАКС определяется суммой весовых составляющих вида 2 m – j при значении всех коэффициентов аj = 1: lМАКС = 2 m – 1, а
суммарное число “разрешенных” уровней
квантования l Поскольку
в при передаче телефонных сигналов в
каналах ЦСП с ИКМ используется
двухполярное кодирование (для устранения
постоянной составляющей и гармонических
частот вида kFд,
Проиллюстрируем процесс кодирования при помощи простейшего примера. Пусть разрядность натурального двоичного кода m = 4. Тогда образующий полином примет вид:
при
этом lМАКС
= 24
– 1 = 15, l
При помощи симметричного двоичного кода первым символом кодовой комбинации кодируется знак отсчета:
li
= +11
li
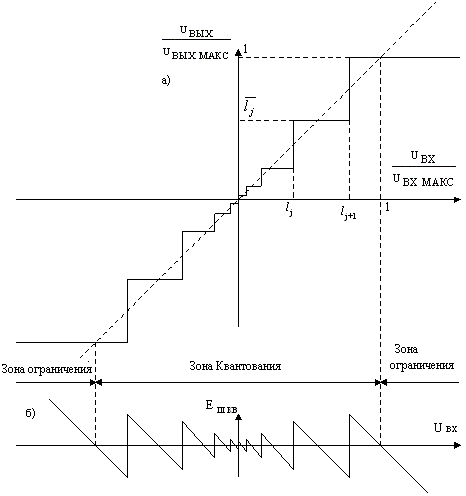
= -11 В современных ЦСП с ИКМ на передаче операции квантования по уровню и кодирование реализуются в одном устройстве, называемом кодером: на его вход подается сигнал с АИМ-2, на выходе формируется цифровой двоичный сигнал с ИКМ. На приеме осуществляется обратное преобразование при помощи декодера. В общем случае двоичные коды по времени их появления разделяются на параллельные, если сигналы кодовой группы появляются одновременно, и последовательные, если сигналы кодовой группы появляются последовательно во времени, разряд за разрядом. 3.4. Амплитудные характеристики канала ЦСП с ИКМ. Амплитудные характеристики каналов, показывающие зависимость изменения UВЫХ от UВХ, или в нормированных единицах, а ЦСП с ИКМ бывают двух типов:
Рис. 3.7. Линейное квантование по уровню: а) амплитудная характеристика; б) шумы квантования. При
линейном квантовании как показано на
рис 3.7. шаг квантования в зоне квантования
одинаков во всем рабочем динамическом
диапазоне изменения входного сигнала
от UВХ
МИН
до UВХ
МАКС,
а амплитуда шума квантования не
превышает половины шага квантования:
Мощность
шума квантования при равномерной
шкале квантования является величиной
постоянной:
где
Норма
на величину защищенности от шумов
квантования, равная АЗ Ш
КВ доп
= 10 lg RШ
КВ доп
= 33
То есть АЗ Ш КВ доп оказывается большей, чем величина АЗ Ш КВ МИН = РМИН ТФ – РШ КВ = 35 дБ во всем динамическом диапазоне ТФ сигнала, как показано на рис. 3.8.
Рис. 3.8. Защищенность от шумов квантования при линейном квантовании. Разрядность кодовой комбинации, при которой выполняется норма на АЗ Ш КВ доп можно определить из выражения (3.6):
Пик-фактор
Q речевого сигнала равен величине Q =
14
Если
требуется обеспечить защищенность
от шумов квантования во всем динамическом
диапазоне сигнала не менее, чем АЗ Ш
КВ доп
= 35 дБ, то потребуется m = 11 (из формулы
3.7), а с учетом двухполярного кодирования
m = 12. При этом защищенность для сигналов
с максимальной амплитудой ( Большое число разрядов в коде (m = 12) при равномерном квантовании приводит к усложнению аппаратуры ЦСП с ИКМ и неоправданному увеличению частоты передачи кодовых импульсных комбинаций (тактовой частоты в канале). Устранить указанный существенный недостаток можно, осуществляя неравномерное (нелинейное) квантование, которое используется в современных ЦСП. Сущность неравномерного квантования заключается в следующем. Для малых по амплитуде ТФ сигналов шаг квантования выбирается минимальным и постепенно увеличивается, достигая максимальных значений для больших по амплитуде ТФ сигналов, как показано на рис. 3.9.
Рис. 3.9. Нелинейное квантование по уровню: а) амплитудная характеристика; б) шумы квантования. При
этом РШ
КВ
возрастает с увеличение шага квантования
для больших по мощности ТФ сигналов,
однако их отношение
АЗ Ш
КВ
= 10 lg RШ
КВ
Рис. 3.10. Защищенность от шумов квантования при нелинейном кодировании. При
нелинейном квантовании общее число
уровней квантования уменьшается по
сравнению с линейным в том же динамическом
диапазоне сигнала (см. рис. 3.7 и 3.9). в
результате удается снизить разрядность
кодовой канальной комбинации до m = 8
(l Эффект
неравномерного квантования может
быть получен путем сжатия динамического
диапазона сигнала с последующим
равномерным квантованием и обратным
преобразованием на приеме при помощи
системы компандирования, по алгоритму
приведенному в разделе 3.2 (рис. 3.5). Этот
способ применялся в ЦСП с ИКМ первых
выпусков (60
В
настоящее время нелинейное кодирование
осуществляется путем принятия
логарифмической амплитудной
характеристики, когда передается не
эффективное напряжение ТФ сигнала, а
его логарифмическое значение, что
эквивалентно сжатию динамического
диапазона. Используются две
логарифмические характеристики типа
А и
где
А = 87,6 и
Процесс логарифмирования (сжатия (компрессии) динамического диапазона) и кодирования, а также обратная операция декодирования и расширения (экпандирования), реализуется в цифровом виде в нелинейных кодерах и декодерах (кодеки), алгоритмы работы которых и схемная реализация будут рассмотрены далее (раздел 5.1). Характеристика
компандирования типа А используется
в ЦСП с ИКМ соответствующих европейской
иерархии, а типа
|
 ,
изменяется в соответствии с изменением
модулирующего сигнала с(t), а при АИМ-2
амплитуда каждого отсчета постоянна
и равна значению модулирующего сигнала
в начальный момент отсчета. На рис.
3.1 представлен исходный модулирующий
сигнал с(t), а также сигналы АИМ-1 и АИМ-2
в случае дискретизации двухуровневых
сигналов.
,
изменяется в соответствии с изменением
модулирующего сигнала с(t), а при АИМ-2
амплитуда каждого отсчета постоянна
и равна значению модулирующего сигнала
в начальный момент отсчета. На рис.
3.1 представлен исходный модулирующий
сигнал с(t), а также сигналы АИМ-1 и АИМ-2
в случае дискретизации двухуровневых
сигналов.
 где
w = 2
где
w = 2 разница
между сигналами АИМ-1 и АИМ-2 оказывается
несущественной, а их частотные спектры
практически совпадают: G1(f)
= G2(f)
= G(f). Это условие выполняется в ЦСП,
так как длительность канальных
импульсов
разница
между сигналами АИМ-1 и АИМ-2 оказывается
несущественной, а их частотные спектры
практически совпадают: G1(f)
= G2(f)
= G(f). Это условие выполняется в ЦСП,
так как длительность канальных
импульсов
 где
N – число каналов.
где
N – число каналов. а
частотный спектр определяется следующим
образом:
а
частотный спектр определяется следующим
образом:





 (3.2)
(3.2) (3.3)
(3.3)

 [7].
Тогда РШ
КВ
на 1 Гц полосы частот в общем виде имеет
выражение:
[7].
Тогда РШ
КВ
на 1 Гц полосы частот в общем виде имеет
выражение:
 (3.4)
(3.4) или
или
 в
относительных единицах, АЗ
= 10 lg RМ,
дБм или АЗ
= 20 lg RН,
дБм в логарифмических единицах, где
РС,
РП,
UС,
UП
– мощности и напряжения сигнала и
помехи соответственно.
в
относительных единицах, АЗ
= 10 lg RМ,
дБм или АЗ
= 20 lg RН,
дБм в логарифмических единицах, где
РС,
РП,
UС,
UП
– мощности и напряжения сигнала и
помехи соответственно.
 на
единичном сопротивлении равна
на
единичном сопротивлении равна

 (3.5)
(3.5) (3.6)
(3.6)

 ,
так и пик-фактор
,
так и пик-фактор
 .
.
 .
При превышении UВХ
некоторого UВХ
МАКС,
наступает режим ограничения: UВЫХ
.
При превышении UВХ
некоторого UВХ
МАКС,
наступает режим ограничения: UВЫХ при
динамическом диапазоне телефонного
сигнала равном 40 дБ:
при
динамическом диапазоне телефонного
сигнала равном 40 дБ: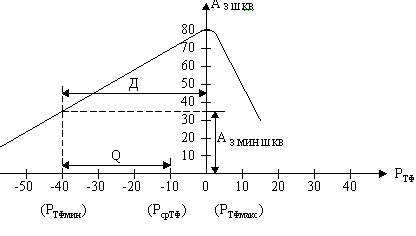

 стремится
к постоянной величине. Таким образом
происходит выравнивание АЗ Ш
КВ
во всем динамическом диапазоне
изменения уровней ТФ сигнала:
стремится
к постоянной величине. Таким образом
происходит выравнивание АЗ Ш
КВ
во всем динамическом диапазоне
изменения уровней ТФ сигнала: