

Параметры хронирующих сигналов
В наиболее общем случае систему синхронизации можно характеризовать параметрами синхросигналов, которые осуществляют передачу информации о тактовой частоте. При этом следует иметь в виду, что первоначальные параметры синхросигнала определяются параметрами соответствующего генератора. По мере распространения синхросигнала по сети его параметры изменяются обычно в худшую сторону за счет появления фазовых флуктуаций: быстрых — джиттера и медленных — вандера. Условной границей между джиттером и вандером считают скорость флуктуации 10 Гц.
Рассмотрим вначале параметры генераторов: точность и стабильность частоты генерируемого сигнала, и коэффициент вариации Аллана.
Точностью частоты генерируемого сигнала называется относительное отклонение частоты генерируемого сигнала faот номинального значения f0. Таким образом, точность равна
![]()
Стабильностью частоты генератора сигнала называется способность данного генератора поддерживать режим генерации сигнала с заданной точностью в определенный период времени
![]()
где — τ период измерений. В зависимости от длительности периода измерений различают кратковременную идолговременную стабильность. Граница между этими типами стабильности точно не определена (от одной тысячи до десяти тысяч секунд). Обычно считают кратковременной стабильностью стабильность за период в одну секунду, а долговременной — за период 1 сут (86400 с).
Коэффициент вариации Аллана (AVAR — Allan variance) численно равен среднеквадратическому относительному отклонению частоты и даёт статистическую оценку стабильности.
![]()
где Ν- количество измеренных значений отклонения частоты.
Основная задача синхронизации — обеспечение равенства или кратности тактовых частот всех цифровых устройств на сети преследует цель обеспечения равенства соответствующих временных интервалов во всех устройствах. Поэтому качество синхросигналов наиболее часто характеризуют такими параметрами, как:
- максимальная ошибка временного интервала (МОВИ, ΜΤΙΕ);
- девиация времени (TDEV).
Мерой времени в каждом сетевом элементе может служить фаза синусоидального (периодического) сигнала. Такой сигнал определяется выражением:
![]()
где ![]() -
частота вгерцах.
-
частота вгерцах.
Фаза сигнала генератора пропорциональна времени
![]() ,
,
и для реального случая может быть представлена выражением
![]()
где φ(t) — фазовый шум.
От измеренного значения фазы можно перейти к оценке времени T(t)
![]()
Поскольку
фаза ![]() (t) случайна,
функция T(t) также
будет случайной функцией времени.
Поэтому следует ввести понятиевременной
ошибки OB(t) (рис.
2.8) — разности времени, измеренного с
помощью реального генератора Tp(t) и
идеального генератора T0(t), т.е.
(t) случайна,
функция T(t) также
будет случайной функцией времени.
Поэтому следует ввести понятиевременной
ошибки OB(t) (рис.
2.8) — разности времени, измеренного с
помощью реального генератора Tp(t) и
идеального генератора T0(t), т.е.
![]()
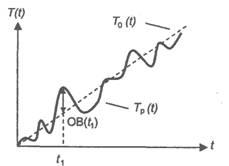
Рис. 2.8. Определение временной ошибки ОВ
Временная ошибка зависит от длительности интервала τ, на котором осуществляется измерение, и от положения этого интервала на оси времени. Поэтому в качестве параметров используются такие величины, как ошибка временного интервалаОВИ (t, τ), определяемая соотношениеми максимальная ошибка временного интервала MOBИ(τ ), соответствующая максимальной разности между значениями временной ошибки в пределах интервала τ:
![]()
![]()
Эти параметры поясняются на рис. 2.9. ОВИ и МОВИ измеряются обычно в наносекундах (нс). Таким образом, МОВИ(τ) характеризует возможные пиковые ошибки временных интервалов и позволяет определить объем буферных устройств в сетевых элементах.
Статистические ошибки временных интервалов оцениваются с помощью временной девиацииTDEV, которая является оценкой среднеквадратичной ошибки временного интервала и измеряется также в нс:
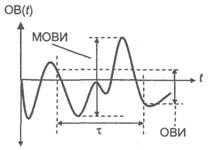
Рис. 2.9. Определение ОВИ и МОВИ
![]()
где черта сверху обозначает усреднение. Очевидно, что параметрTVAR — временная вариация — представляет собой дисперсию ошибок временных интервалов
На рис. 2.10 показаны зависимости OB(t) для различных сигналов синхронизации. Зависимость 1 — отвечает идеальному синхросигналу, его ОВИ равно нулю на любом интервале измерений. Кривая 2 — соответствует синхросигналу, приходящему от точного, но нестабильного генератора, что приводит к изменениям ОВИ (вандер). Синхросигнал от стабильного, но неточного генератора (кривая 3) - характеризуется нарастанием ОВИ с увеличением интервала измерений. Наконец, кривая 4 — соответствует неточному и нестабильному источнику синхросигнала.
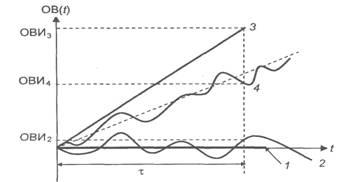
Рис. 2.10. Характеристики ОВ для различных синхросигналов:
1 — идеального; 2 — точного, но нестабильного; 3 — стабильного, но неточного; 4 — неточного и нестабильного
Заметим попутно, что отношение ошибки временного интервала к периоду наблюдения ОВИ/τ соответствует относительной нестабильности частоты ∆f/fo(τ).
Как уже отмечалось выше, требования к задающим генераторам систем плезиохронной цифровой иерархии не очень жесткие; для этих генераторов нормируется долговременная нестабильность частоты. Нормы эти определяются нормами на стабильность скорости передачи в соответствующих сетевых цифровых трактах. Нормы на параметры синхросигналов, поступающих в составе линейных сигналов, так же как и в системах плезиохронной иерархии, определяются нормами на фазовые флуктуации в соответствующих цифровых трактах.