


На рисунке построен график зависимости амплитуды A вынужденных колебаний от частоты вынуждающей силы. Этот график называется
амплитудной резонансной кривой.
Рассмотрим параметры, которые характеризуют резонансную кривую.
A F0
m
 ( 02 2 )2 4 2 2
( 02 2 )2 4 2 2

На резонансной частоте = р функция A( ) достигает максимума.
Тогда выражение для р легко найти, приравняв производную dA/d к нулю
(или производную от подкоренного выражения):
dd [( 02 2 )2 4 2 2 ] 0
Тогда для резонансной частоты получаем формулу:
р 
 02 2 2
02 2 2
При малом затухании, т.е. при ( 0 >> )
р 0

Амплитуда Amax вынужденных колебаний в условиях резонанса (максимальная амплитуда):
Amax A( р ) |
|
F0 |
|
|
|
|
|||||
|
|
|
|
|
|||||||
m ( 02 р2 )2 |
4 2 |
|
|||||||||
|
|
|
|
|
|
р2 |
|||||
|
|
F0 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
2m |
|
02 2 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||||
В условиях малого затухания:
Amax |
F0 |
|
2m 0 |
В идеализированной системе, т.е. в |
|
|
|
отсутствие затухания амплитуда A |
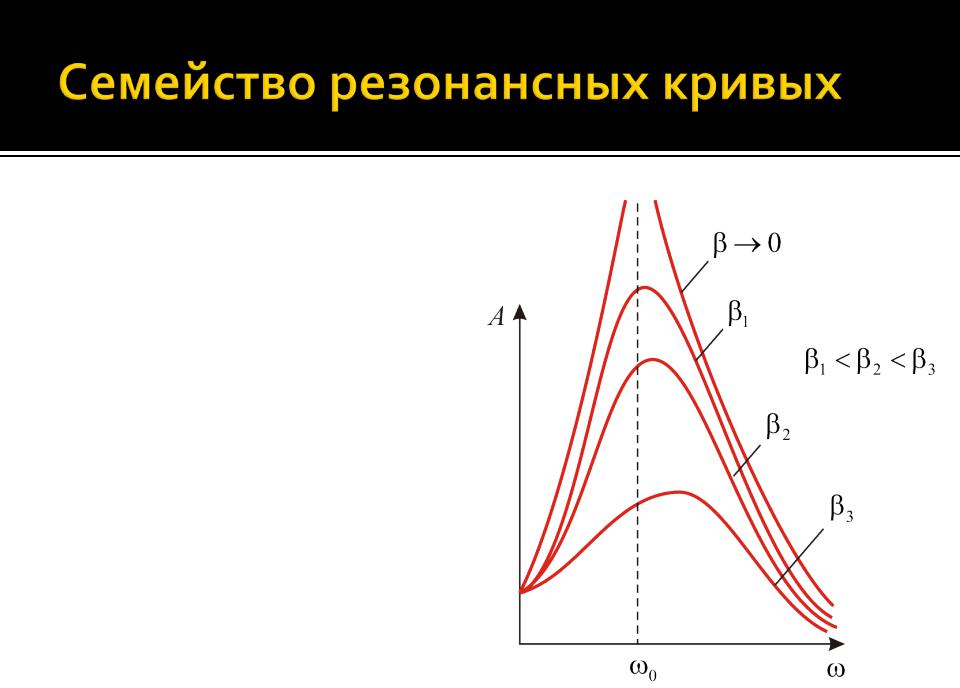
На рисунке изображено семейство резонансных кривых при различных значениях коэффициента затухания
Стремление 0 означает, что
внешняя сила F = F0cos( t) с течением времени изменяется очень медленно, т.е. ее можно считать постоянной величиной
F F0.
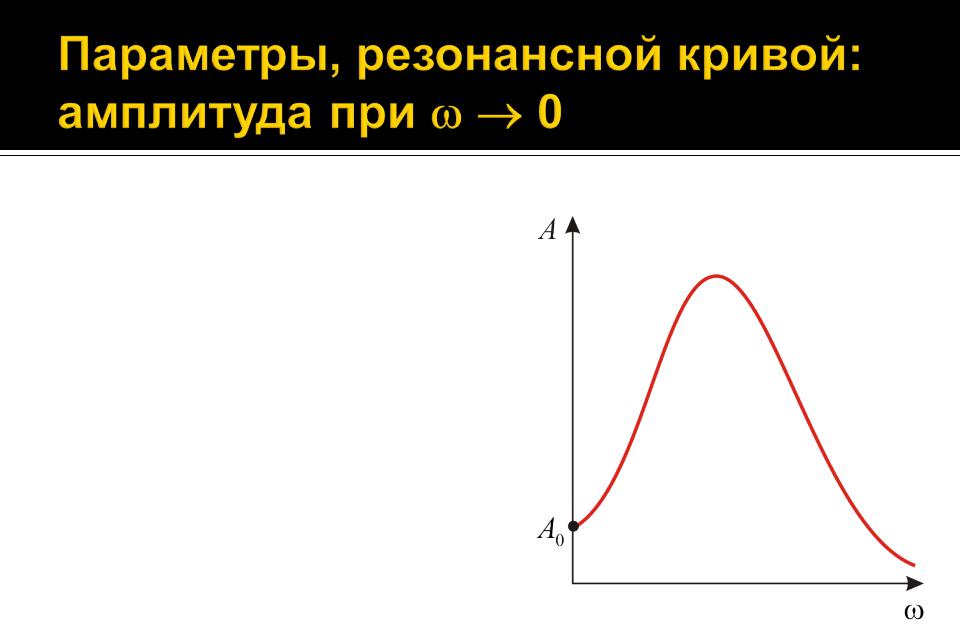
В этих условиях тело смещается из положения равновесия и его координата x мало меняется со временем.

Амплитуда вынужденного колебания равна величине смещения тела из положения равновесия:
F F
A0 A( 0) m
 ( 02 0)02 4 2 0 m 0 02
( 02 0)02 4 2 0 m 0 02
Если системой является пружинный маятник, то 0 = (k/m)1/2,
тогда A0 = F0/k, т.е. амплитуда вынужденного колебания совпадает с удлинением пружины под действием постоянной силы.